
Fターム[5L096HA11]の内容
Fターム[5L096HA11]に分類される特許
21 - 40 / 169
画像処理装置、画像処理方法、およびプログラム
【課題】顔検出を行う場合に、誤検出を制御し、更に検出時間を短縮する。
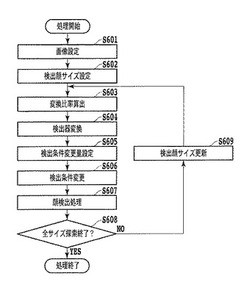
【解決手段】画像に含まれる顔を検出する検出器を有する画像処理装置において、検出する顔のサイズに応じて、検出時の検出条件を変更し、検出する顔のサイズが小さいサイズの場合には、顔検出に用いられる閾値を厳しく設定することで、検出する顔のサイズが小さい場合の誤検出を抑制する。また、顔のサイズが小さい場合には検出器によって顔でないと早期に判断されるため高速な検出処理を実現する。
(もっと読む)
遺伝的処理装置、遺伝的処理方法、および遺伝的処理プログラム

【課題】遺伝的処理において、変換適合度がより高い変換器を生成する。
【解決手段】入力データを処理して処理結果を出力データとして出力する複数の処理部品を含む少なくとも1つの前世代の変換器から遺伝的処理により現世代の変換器を生成する生成部と、それぞれの現世代の変換器について学習用入力データから学習用目標データへの変換に対する適合度を算出する適合度算出部と、世代間での適合度の増分が基準値より大きい場合又は世代間での前記適合度の増分が他の世代と比較して相対的に大きい場合に、対応する世代に関する情報を収集する収集部と、を備える遺伝的処理装置を提供する。
(もっと読む)
形状推定システム、撮影装置、形状推定方法、プログラム及び記録媒体
【課題】 光源からの光により生じる対象物の影から対象物の形状をより適切に推定可能な形状推定システム等を提供することを目的とする。
【解決手段】 形状推定システム1において、影撮影装置5は、例えば、撮影部19の周囲に複数の光源151,・・・,15Nを配置し、例えば1回ずつ点灯させるN回点灯制御を行い、各点灯制御に同期して撮影部19は撮影する。撮影データは撮影データ記憶部21に記憶され、画像データ修正部27によりノイズ除去等の修正処理が施され、特徴情報生成部29は、例えば多段階のウェーブレット多重解像度解析を行い、各成分の二乗平均平方根を取ることにより得られる対象物3の影の特徴を示す特徴情報を生成する。対象物3が既知の形状であれば、学習部31は例えば自己組織化マップを学習させる。対象物3が未知の形状であれば、推定部35は学習後の自己組織化マップに提示して既知の形状の一つを対象物3の形状として推定する。
(もっと読む)
可変姿勢を含む画像シーケンスのリアルタイム利用可能なコンピュータ支援分析方法
本発明は、互いに関して可動な相互接続された複数要素からなる物体の可変姿勢画像シーケンスのリアルタイム利用可能なコンピュータ支援分析方法に関する。画像シーケンスの個別画像が、コンピュータによって処理されること並びにシーケンスの各画像に対するカメラのピクセル座標の関数として明暗及び距離データを有するべく飛行時間(TOF)カメラによって記録される。本方法は、a.物体を形成する個別画像のピクセルを取得するステップと、b.カメラに可視の物体の表面を表す仮想空間内の3次元(3D)点集合を、物体からの距離について取得されたデータを考慮に入れた物体マッピングピクセルの空間への計算機投影によって計算するステップと、c.物体の複数要素の一選択を表す複数ノードと要素の相互接続を表す複数エッジとからなる物体のモデルを、個別画像に対してコンピュータ生成された3D点集合にフィッティングするステップと、d.点集合についてランダムにサンプリングされた所定数の点を有する自己組織化マップを訓練する学習ルールを適用してすべてのノード位置を逐次更新するステップと、e.シーケンスの各後続個別画像に対してステップ(a)から(d)を繰り返すステップであって、先行フレームのステップ(e)の結果がステップ(c)でのフィッティングのプロセスを目的として使用されるステップと、f.画像シーケンスの少なくとも代表画像において取得された、モデルの所定ノード位置からの変化姿勢を決定するステップとを含む。  (もっと読む)
(もっと読む)
動作検出装置
【課題】画像ブロックごとに物体のエッジを検出しエッジ像の位置、移動方向、速度をリアルタイムで検出解析する動作検出装置において、エッジ及び速度の検出精度の高い動作検出装置を提供する。
【解決手段】垂直方向動作検出部5と水平方向動作検出部6を別々に分け、垂直方向動作検出部5におけるブロック分割の区画線を、中央水平線とそれに平行な複数の周域水平線、及び中央垂直線とそれを線対称軸として中央水平線からフレームの上辺及び下辺に向かって中央垂直線から遠ざかる方向へ傾斜する複数の対称折線とする。また、水平方向動作検出部6におけるブロック分割の区画線を、中央垂直線とそれに平行な複数の周域垂直線、及び中央水平線とそれを線対称軸として中央垂直線からフレームの左辺及び右辺に向かって中央水平線から遠ざかる方向へ傾斜する複数の対称折線とする。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】顔候補が重複した領域において、精度良く被写体パターンを検出できるようにする。
【解決手段】画像から前記被写体パターンと照合するための所定の部分領域を抽出し、前記抽出された部分領域が前記被写体パターンであるかどうかを判別する。そして、抽出された部分領域の被写体の信頼度を算出する。次に、判別された複数の部分領域同士が画像中で重なり合う領域を含むか否かを判定し、2つの部分領域同士が重なり合う領域を含むと判定された場合、前記算出した被写体の信頼度の値が小さい方を被写体パターン候補から削除し、削除された後に残った被写体パターン候補を代表パターンとして出力する。
(もっと読む)
赤目を検出する方法、赤目検出システム、赤目検出装置、コンピューター読み取り可能な媒体および画像処理装置
【課題】ニューラルネットワーク分類器(NNC)を用いた赤目検出方法を提供すること
。
【解決手段】まず画像において特定された赤目オブジェクト候補のセットが受信され、次
に赤目オブジェクト候補から特徴点が抽出され、複数の分類器を用いて偽の赤目オブジェ
クトが抽出された特徴点に基づき赤目オブジェクト候補のセットから除去される。複数の
分類器の内第1および第2のものは各々抽出された特徴点の第1および第2のものを用い
て第1範囲のサイズにオブジェクトを分類し、複数の分類器の内第3および第4のものも
各々抽出された特徴点の第1および第2のものを用いて第2範囲サイズにオブジェクトを
分類する。
(もっと読む)
画像処理装置、プリンター、画像処理方法および画像処理プログラム
【課題】学習データーを利用して検出された顔画像の検出結果の信頼度を適切に評価する。
【解決手段】略正面向きの顔画像の有無を示す情報を出力するように教師データーを用いて学習した検出器を利用して対象画像上における略正面向きの顔画像の検出を行う顔検出部M3と、略正面向きの顔画像の有無を示す情報を出力するように前記教師データーの鏡像を用いて学習した検出器を利用して対象画像上における略正面向きの顔画像の検出を行う鏡像検出部M53と、顔検出部M3によって検出された顔画像の信頼度を評価する顔評価部M5と、顔検出部M3によって検出された顔画像と所定割合以上重複する領域で前記鏡像検出部M53が顔画像を検出すると、顔検出部M3の検出した顔画像の信頼度を上昇させる。
(もっと読む)
物体検知装置及び物体検知方法
【課題】広域な範囲で、かつ詳細に物体を高速に検知できるようにする。
【解決手段】読出部20は、検知した物体領域に基づいて画像を読み出す領域及び解像度を決定する。そして、画像を読み出す処理及び領域を決定する処理を繰り返すようにして、領域を絞り込みながら、解像度を上げ、検知した物体領域に絞り込んで所望の物体を認識するようにして、高画素のイメージセンサを備えた監視カメラを用いても人物や物体の侵入検知を、実用的な時間内に行うことができるようにする。
(もっと読む)
パターン識別装置及びパターン識別装置の学習方法ならびにコンピュータプログラム
【課題】学習に必要な演算量を低減可能なパターン識別装置の学習方法を提供する。
【解決手段】特徴抽出用パラメータに従ってデータから識別用特徴量を抽出する特徴抽出器11と、識別用特徴量を入力としてそのデータに表されたパターンを識別する識別器12とを有するパターン識別装置1の学習方法は、(a)学習用データセットに含まれる同一のパターンが表された学習用データの組を特徴抽出器11に入力して得られる識別用特徴量のクラスタを決定するステップと、(b)クラスタ間の最小距離を求めるステップと、(c)最小距離の極大値が検出されたか否か判定するステップと、(d)極大値が検出されていないと判定した場合、特徴抽出用パラメータを変更して、ステップ(a)〜(c)を繰り返すステップと、(e)極大値が検出された場合、その極大値に対応する特徴抽出用パラメータが、パターン識別処理の実行時に使用されるものとするステップを含む。
(もっと読む)
学習装置、画像処理装置、学習方法、画像処理方法、及びプログラム
【課題】画素位置に応じたイメージセンサの特性を考慮して撮像画像を高画質化すること。
【解決手段】第1画像に含まれる複数の画素であって、当該第1画像よりも高質な第2画像において注目された注目画素の近傍の画素位置に対応する複数の画素を予測タップとして抽出する予測タップ抽出部と、前記注目画素の前記第2画像における画素位置に応じて、当該注目画素のクラスを決定するクラス分類部と、前記第2画像の画質を有する予め取得された教師画像と、当該教師画像に画素位置に応じて異なるフィルタを適用して生成された前記第1画像の画質を有する生徒画像とを用いて、前記予測タップの画素値から前記注目画素の画素値を予測するために用いられる予測係数を前記クラス分類部により決定された前記クラスごとに算出する係数算出部と、を備える学習装置を提供する。
(もっと読む)
画像処理装置および方法、学習装置および方法、並びにプログラム
【課題】被写体が鮮明に写っているか否かを確実に評価できるようにする。
【解決手段】被写体抽出部21は、入力画像を用いて、入力画像における被写体の含まれる領域を示す被写体マップを生成し、判定部22に供給する。判定部22は、入力画像と、被写体抽出部21からの被写体マップとを用いて、入力画像上の被写体の領域のぼけ具合を求め、そのぼけ具合に基づいて、入力画像のスコアを算出する。このスコアは、入力画像において、被写体が鮮明に写っている度合いを評価する指標とされる。本発明は、撮像装置に適用することができる。
(もっと読む)
次元削減方法、パターン認識用辞書生成装置、及びパターン認識装置
【課題】高次元特徴空間での識別処理による識別率の低下、計算量の増大、使用メモリの増大を解決するために、高精度、高速、省メモリを目的とした効率的な特徴空間の次元削減を行う。
【解決手段】辞書生成用特徴パターン群を用いて、多項式ニューラルネットワークにより二次関数を学習し、二次関数の主要成分を保存する部分空間を選択することにより、特徴空間の次元を削減する。初期係数設定ステップ42、係数修正ステップ43では、二次関数を識別関数として用いた場合の損失関数の値が小さくなるように、勾配降下法又は確率的勾配降下法により係数を修正する。基底ベクトル導出ステップ44は、二次関数の二次の項の二次形式の行列の固有ベクトルと、一次の項の係数ベクトルを導出する。次に、射影行列導出ステップ45は、固有ベクトルと係数ベクトルとの中から主成分となる1つ以上のベクトルを選択し、選択されたベクトルによって生成される部分空間を新たな特徴空間として生成する。
(もっと読む)
画像処理装置、画像処理方法、及びコンピュータプログラム
【課題】 画像中から複数種類の被写体の判別を効率良く、且つ高精度に行えるようにする。
【解決手段】 複数種類の被写体の判別を行う際に、1つの縮小画像401から複数の局所特徴量を抽出し、当該局所特徴量の夫々と、当該局所特徴量の画像特性に応じた属性とを対応付けて記憶する。そして、注目領域402の特徴量の属性から、複数の被写体に対する被写体尤度を求め、被写体尤度が閾値以上の被写体を被写体候補とし、被写体候補が所定の被写体であるか否かを判定するようにした。すなわち、被写体に固有の特徴量による被写体の判別を行う対象となる被写体の数を絞り込むようにした。その結果、複数種類の被写体の判別を高精度に実現できる。また、局所特徴量の算出及び局所特徴量とその属性との対応付けは、被写体の種別に依らず共通の処理で行うので、複数種類の被写体の判別を効率良く行うことができる。
(もっと読む)
移動物体認識方法及び装置
【課題】移動物体の動作を、より正確に、認識可能にする。
【解決手段】動きベクトル算出部37において、前フレーム画像を、複数ピクセルからなるブロックに分割したときの、移動物体の一部が含まれる各ブロックについて、現フレーム画像内で、該ブロックと同一形状で類似したものを見つけて、該ブロックの動きベクトルを求め、該移動物体に含まれる複数のブロックの各動きベクトルの代表値を、該移動物体の動きベクトルと決定する。
(もっと読む)
監視ゾーン内の対象物の移動を分類する装置および方法
監視領域(12)内の対象物(26)の移動を監視するための装置は、個々に領域内の複数の隣接ゾーン(24.1から24.n)の各々における対象物(26)の存在または不在に感応する上空カメラ(20)を備える。ゾーンは、第1の方向(y)に少なくとも2つの隣接するゾーンの列があり、第1の方向と垂直な方向(x)に少なくとも2つの隣接するゾーンの列があるように配置される。各ゾーンは、それぞれのゾーンインデックスに関連付けられている。カメラは、ゾーンの各々における対象物の存在または不在に関連する感知されたデータを備える領域内を移動している対象物の時間系列イメージ(a)から(f)を取り込むように動作可能である。プロセッサ機構は、感知されたデータを、ゾーン内の対象物の存在または不在の多次元パターンに処理するためにカメラに接続され、第1の次元は時間であり、第2の次元はゾーンインデックスである。プロセッサ機構は、パターンをイベントに関連するパターン部分にセグメント化するように構成される。分類器は、予測されるイベントに関連する履歴データを参照してパターン部分を分類するために提供され、それにより領域内を少なくとも1つの方向に移動している対象物のカウントを提供する。  (もっと読む)
(もっと読む)
外観検査処理方法
【課題】高い検査精度の外観検査を短時間で実現する。
【解決手段】色抽出部5は、正常状態の検査対象物を撮像したRGBカラー画像について、RGBの各座標値を特徴量とする学習データを画素ごとに作成する。分類部2は、各学習データを競合学習型ニューラルネットワーク1に入力して学習させ、クラスタリングマップを作成する。学習後、分類部2は、競合学習型ニューラルネットワーク1に再度入力させた学習データごとに、クラスタリングマップ上の各ニューロンにおいてユークリッド距離を求め、各ニューロンについてユークリッド距離のリストを作成する。その後、分類部2は、各ニューロンについて、上記リストの最大値を分散とし、重みベクトルを平均ベクトルとして定義したガウス関数を設定する。その後、分類部2は、学習データごとに全ニューロンのガウス関数値総和を求め、全学習データに関するガウス関数値総和の最小値を下限閾値に設定する。
(もっと読む)
対象物判定装置及びプログラム
【課題】対象物がマスクやサングラスなどの装着物を装着しているか否かを信頼性高く判定することができる対象物判定装置及びプログラムを提供する。
【解決手段】撮像して得られた画像が表す対象物について、マスクを装着した対象物の画像およびマスクを装着していない対象物の画像に反応するように学習した機械学習システムを用いて対象物らしさを示す尤度値p1を算出し(S104)、マスクを装着した対象物の画像に反応するように学習した機械学習システムを用いてマスクを装着した対象物らしさを示す尤度値p2を算出し(S106)、マスクを装着していない対象物の画像に反応するように学習した機械学習システムを用いてマスクを装着していない対象物らしさを示す尤度値p3を算出し(S108)、該算出された3つの尤度値p1、p2、p3に基づいて、該撮像されて得られた画像が表す対象物がマスクを装着しているか否かを判定する(S110)。
(もっと読む)
対象物判定装置及びプログラム
【課題】対象物がマスクやサングラスなどの装着物を装着しているか否かを信頼性高く判定することができる対象物判定装置及びプログラムを提供する。
【解決手段】撮像して得られた画像が表す対象物について、マスクを装着した対象物の画像に反応するように学習した機械学習システムを用いてマスクを装着した対象物らしさを示す尤度値を算出し(S104)、マスクを装着していない対象物の画像に反応するように学習した機械学習システムを用いてマスクを装着していない対象物らしさを示す尤度値を算出し(S106)、該算出された2つの尤度値の比に基づいて、該撮像されて得られた画像が表す対象物がマスクを装着しているか否かを判定する(S108)。
(もっと読む)
有糸分裂像検出装置および計数システム、および有糸分裂像を検出して計数する方法
少なくとも1つの染料で染色された生検標本の画像内の有糸分裂像を検出して計数する方法およびシステムは、画像をコンピュータ処理で色濾過し、該画像内の有糸分裂像を示す有色の画素を特定すること、画像内の互いに連結された有糸分裂の画素をコンピュータ処理で抽出し、それによって有糸分裂の画素の塊を生成すること、有糸分裂の画素の塊をコンピュータ処理で形状濾過および群化して、有糸分裂像の候補を生成すること、塊の位置で生検標本画像をトリミングすることによって、有糸分裂像のサブ画像を抽出すること、有糸分裂像の候補から2つの特徴群を2つの個別のコンピュータ処理で抽出すること、抽出された2つの特徴群に基づいて、有糸分裂像の候補のどれが有糸分裂像かをコンピュータ分類処理で決定すること、生検標本組織の平方単位当たりの有糸分裂像の数を計数すること、を含む。 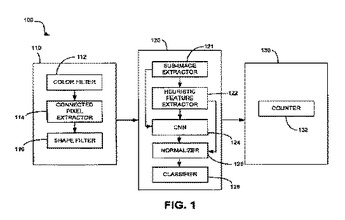 (もっと読む)
(もっと読む)
21 - 40 / 169
[ Back to top ]