
Fターム[5L096JA26]の内容
Fターム[5L096JA26]に分類される特許
1 - 18 / 18
物体検出方法
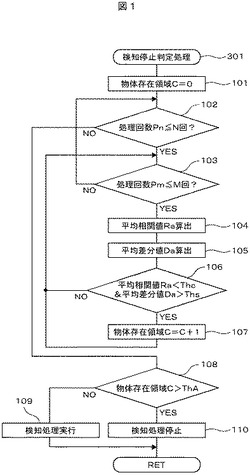
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
情報処理装置及び方法、並びにプログラム

【課題】 データを複数範囲の何れかに分類する場合に、誤分類を抑制できる
【解決手段】 多段判定部は、複数の範囲のうちの少なくとも1つに判定対象を分類する判定を行うために、N階層(Nは2以上の整数値)の木構造の各ノードとして機能する各判定機を有する多段判定部を備え、各判定機は、判定対象を、2つの範囲のうちの何れか一方に分類する判定を行い、各判定機において判定される2つの範囲には、重複する部分が含まれている。本技術は、データを分類する情報処理装置に適用することができる。
(もっと読む)
画像認識プログラム、画像認識装置、画像認識システム、および画像認識方法
【課題】画像から所定の物体または図柄の輪郭を高い精度で検出できるようにすること。
【解決手段】まず、画像における第1画素の画素値と、当該第1画素から所定画素数だけ離れた位置にある第2画素の画素値との差分を計算する。そして、当該差分が所定値以上である場合に、第1画素またはその近傍画素の画素値と、第2画素またはその近傍画素の画素値とに基づいて、エッジ判定閾値を計算する。そして、第1画素と第2画素に挟まれた各画素の画素値とエッジ判定閾値とを比較することによって、第1画素と第2画素の間に存在するエッジに対応するエッジ画素を検出する。
(もっと読む)
画像識別装置
【課題】頑健性を低下させることなく早期棄却を実現する画像識別装置を提供する。
【解決手段】未適用弱選択器群の中から選択した一つの弱識別器を対象画像に適用した結果fnに従って、獲得スコアS(-)1:n(=S(-)1:n-1+wnfn)を更新し、全ての弱識別器が適用済みであれば、獲得スコアS(-)1:Nfを判定スコアSとして出力する。一方、未適用の弱識別器があれば、未適用弱識別器群を対象画像に対して適用した場合に得られる獲得スコアの予測分布(期待値En,分散Vn)から、予測スコアS1:Nf(=S(-)1:n+En)のバラツキ上限値SH(En+Vn)及び下限値SL(En−Vn)を求め、SH≧TH且つSL≦THであれば、予測スコアの精度は不十分として、対象画像に対する処理を継続し、SH<TH又はSL>THであれば、対象画像に対する処理を打ち切り、予測スコアを判定スコアSとして出力する。
(もっと読む)
データ処理装置、データ処理方法及びプログラム
【課題】内部メモリの回路規模を抑制しつつ処理の高速化を図ることを目的とする。
【解決手段】入力データに対してパラメータ保持手段で保持されているパラメータを用いて演算を行なう演算手段と、パラメータ保持手段にパラメータを転送するパラメータ転送手段と、を有し、演算手段での演算の結果に応じて演算の繰り返しが中断された場合、パラメータ転送手段は、パラメータ保持手段に新たなパラメータの転送は行なわず、演算手段は、次の入力データに対する演算をパラメータ保持手段に保持されているパラメータを用いて行なうことによって課題を解決する。
(もっと読む)
対象物検出装置および対象物検出方法
【課題】画像の同一ライン上の検出画素領域を膨張させて検出した結果と履歴とに基いて特定色領域の検出動作を効率よく制御する。
【解決手段】対象物を有する画像を入力する画像入力手段と、上記画像入力手段から入力された画像から所望の色を検出する色検出手段と、上記色検出結果に応じて上記画像を2値化する2値化処理手段と、上記2値化処理手段の結果を用いて特定された色領域の対象物を検出する対象物検出手段と、上記2値化処理手段の結果に基いて上記画像の検出した2値化領域の現在位置の画素から検出領域を膨張させる膨張処理手段と、上記膨張処理手段で膨張した2値化領域の色検出の結果に基いて上記対象物検出手段のオン、オフ動作を制御する制御手段と、を有し、2値化膨張処理結果に基いて対象物検出手段を制御することにより対象物検出における演算量を削減する。
(もっと読む)
画像処理による侵入者検知装置
【課題】監視カメラの画像を用い、入力画像全体に対する照度変化による誤認識を防止しつつ、重要な施設や道路等の立ち入り禁止箇所への侵入者等を検知する。
【解決手段】監視カメラ1と、監視カメラ1から伝送された入力画像の解析を行なう画像処理部2とを備え、画像処理部2が、監視カメラ1の画像を入力する画像入力部21、入力画像と背景画像とを比較して入力画像中における変化を検出する画像変化検出部22、入力画像と背景画像との間の照度の変化を検出し照度変化の割合を算出する全体照度変化検出部23、画像全体における照度変化の割合があらかじめ設定するしきい値以下の場合にのみ侵入物の検出処理を行う侵入物検出部24、全体照度変化検出部23及び侵入物検出部24において検出された結果を出力する結果出力部25及び処理メモリ26を備えるようにした。
(もっと読む)
情報処理装置および情報処理方法
【課題】 カスケードに接続される複数の弱判別器を用いて画像データより特定のオブジェクトを抽出するにあたり、抽出処理速度と抽出精度との組み合わせを柔軟に変更できるようにする。
【解決手段】 カスケード接続される弱判別器を用いてデータを処理する情報処理装置であって、前記複数の弱判別器それぞれの処理内容を規定する情報を格納するROM205と、前記複数の弱判別器のうち使用すべき弱判別器を決定するための情報が規定されたテーブルを参照することにより、前記データの処理に使用すべき弱判別器を前記複数の弱判別器から選択する手段(201)と、前記選択された弱判別器に対応する前記処理内容を規定する情報に基づいて、前記データを処理することで得られた該弱判別器の評価値を用いて、前記データよりオブジェクトを抽出する手段(203)とを備える。
(もっと読む)
画像処理装置、撮像装置、画像処理方法、および、プログラム
【課題】より確実な画像検出を高速におこなう。
【解決手段】参照用画像を用いた識別動作によって入力画像上で検出対象画像を検出する際、記憶部250は、通常の参照用画像とともに、通常の参照用画像が示す特徴部分を縮小した縮小参照画像を格納する。画像変換部211は、画像メモリ230に格納された入力画像を縮小する。第2の識別器215は、画像変換部211が縮小した画像上で、前記縮小参照画像を用いた識別動作をおこなう。識別結果判定部216は、検出用縮小画像上で検出された対象画像の位置を特定する。識別領域設定部213は、特定した位置に対応する入力画像上の位置において、通常の参照用画像を用いた識別動作をおこなうことで、該入力画像上で検出対象画像の検出をおこなう。
(もっと読む)
画像識別方法、画像識別装置及びプログラム
【課題】誤識別を防止しつつ識別処理の速度を向上させる。
【解決手段】
画像データの示す画像が特定のシーンに属する確率に応じた値になる評価値と、前記シーンに予め定められた閾値とを比較し、前記評価値に対応する前記確率が、前記閾値に対応する確率よりも大きい場合に、前記画像が前記シーンに属すると識別する識別処理を、複数の前記シーン毎に順に行い、ある前記識別処理で前記画像が当該識別処理に対応する前記シーンに属すると識別されると、まだ行われていない前記識別処理が省略され、前記識別処理の結果に基づいて前記画像の属するシーンを識別する画像識別方法において、前記画像データに付加されている付加データから、前記画像が属する前記シーンに関するシーン情報を取得し、対応する前記確率が下がるように、前記シーン情報の示す前記シーンの前記閾値を変更する。
(もっと読む)
画像のマッチング処理方法
【課題】照合ベクトル数の削減、照合処理の簡略化による高速化、無駄なテンプレート変動の削除による照合回数の削減の3つを総合的に制御することによって、形状ベースの回転・スケール変動に対応するマッチング処理における高速化を図る。
【解決手段】モデル領域におけるエッジ点のx、y位置と、勾配方向θとで濃度勾配ベクトルを表わし、複数の濃度勾配ベクトルからなるテンプレートデータを用いる形状マッチング処理において、予め、サーチ画像の回転・スケール等の変動範囲に合わせて、テンプレートを構成するベクトルを変動させ、ベクトルが存在し得る位置を網羅し、その位置における重み情報を持ったマスクパターンを作成し、サーチ画像上の任意の位置で変動照合が必要かどうかを、このマスクパターンを用いて計算した一致度で判定し、一致度が低い場合、無駄な回転・スケール等の変動による照合処理を削減して、高速化を図る。
(もっと読む)
パターン認識装置,パターン認識方法,その方法を実装したパターン認識プログラム,そのプログラムを記録した記録媒体
【課題】画像パターンの類似した物体を高精度かつ高速に認識する。
【解決手段】入力された学習画像データをブロック分割し、該学習画像におけるブロックを構成する画素の符号の組み合わせを作成する(104)。次に、前記画素の組み合わせによる同時生起確率を算出し、その算出された同時生起確率を前記画素の組み合わせに応じた確率テーブルを作成し(105)、記憶部に保存する(106)。入力された入力画像をブロック分割し、該入力画像におけるブロックを構成する画素の符号の組み合わせを作成する(110)。前記確率テーブルと前記入力画像データにおける各ブロックの符号の組み合わせに基づいて類似度を算出する(111)。前記物体に応じた類似度において、最大の類似度に応じた物体を識別結果とする(112)。前記識別結果の出力情報として、前記識別結果に応じた物体を識別する情報を出力する(113)。
(もっと読む)
画像処理装置
【課題】画像処理の性能を向上させる。
【解決手段】
位置合わせにおける移動範囲で、少なくとも1つの方向の移動区間を複数の部分区間に分離することにより、部分位置合わせ区間を構成し、最初からm番目(mは正定数)までの部分位置合わせ区間における一致の度合いの最大値が、規定条件外であるときは、以後の部分位置合わせ区間における照合処理は実行せずに、照合は不一致と判定する。
(もっと読む)
照合方法、コンピュータ、およびプログラム
【課題】登録画像の個数が多い場合であっても高速に照合処理を行うことができる照合方法、コンピュータ、およびプログラムを提供する。
【解決手段】照合装置1が、基準画像と被照合画像との間の第1の相関値を生成し、基準画像と複数の登録画像それぞれとの間の複数の第2の相関値であって、第1の相関値よりも前に生成された第2の相関値、および第1の相関値に基づいて、複数の登録画像のうち被照合画像との照合に用いる一部の登録画像を特定し、または登録画像の照合に用いる順番を決定する。
(もっと読む)
領域検出装置、領域検出プログラムおよび領域検出方法
【課題】画像サンプル集合から得られた部分空間を利用して入力画像から特定オブジェクトの画像領域を検出する検出処理を高速化できる領域検出技術を提供する。
【解決手段】領域検出装置では、顔(特定オブジェクト)の画像サンプル集合の主成分分析に基づく主成分空間を利用し、入力画像から切出された画像領域に顔が含まれるかを検出する。この検出では、画像領域のピクセルをベクトル化し、まず主成分空間を張る複数の基底ベクトルのうち1の基底ベクトルに射影して、主成分空間までの距離(DFFS)と主成分空間内での距離(DIFS)とを算出する。ここで、算出されたDFFS、DIFSが所定の範囲内にない場合には、画像領域内に顔がないとして他の基底ベクトルへの射影を打切る。その結果、特定オブジェクトに関する検出処理を高速化できる。
(もっと読む)
テンプレート照合装置および方法
【課題】 テンプレート照合の高速化をはかる。
【解決手段】 テンプレートからサイズの異なるサブテンプレートを生成し、小さいものから順に照合操作を行い、類似性があると判断されたときに段階的にサイズの大きなサブテンプレートで照合を行う。サブテンプレートを用いた照合の計算途中で類似性がないと判断された場合、その照合をうち切り、同時にその近傍の領域との照合も省略する。また、類似するテンプレート同士をグループ化し、グループ内で異なるテンプレートに含まれるサブテンプレート間の自己距離値を事前に算出しておくことで、ある参照サブテンプレートで照合した結果をグループ内で反映し、三角不等式の原理で計算の省略を行う。
(もっと読む)
画像認識方法、画像認識装置および画像認識プログラム
【課題】 ピラミッド画像の形成を行わない画像認識方法、画像認識装置および画像認識プログラムを実現すること。
【解決手段】判定手段26により、モデルパターン22とウィンドウ画像のマッチングを行い、評価値が閾値内であるとされる場合には、この時点でモデルパターン22とウィンドウ画像のマッチングが取れたと認識して、以後の、位置が変更されたウインドウあるいは縮小の大きさの異なる画像情報の生成およびマッチングを行わず、また、判定手段26により、評価値が閾値内でないと判定される場合には、必要に応じて縮小の大きさの異なる画像情報の生成を判定ごとに行うこととしているので、無駄なマッチングを無くすとともに不要な縮小画像の生成を防止し、縮小の大きさの異なる多くの画像情報を含むピラミッド画像の生成にかかる時間を軽減し、ひいては総合的な検索時間を短縮することを実現させる。
(もっと読む)
キャリブレーションチャート画像表示装置、キャリブレーション装置、キャリブレーション方法
【課題】カメラによるキャリブレーションシートの撮影が容易に行えるキャリブレーションチャート表示装置を提供すること。
【解決手段】所定のキャリブレーション撮影方向から撮影されたキャリブレーションチャート1の画像を記憶する校正画像記憶部59と、校正画像記憶部59に記憶されたキャリブレーションチャート画像を、前記キャリブレーション撮影方向と所定の画像回転角度に応じて表示するキャリブレーションチャート画像表示部61とを備えている。
(もっと読む)
1 - 18 / 18
[ Back to top ]