
Fターム[5L096LA15]の内容
イメージ分析 (61,341) | ハードウェア (329) | 構成 (214) | 同一の構成が複数あるもの (27) | アレイ構造 (5)
Fターム[5L096LA15]に分類される特許
1 - 5 / 5
ビジョン・オン・チップ・プロセッサを用いてバーコードを捕捉および検出するためのシステムおよび方法
本発明は、CPU制御されたビジョン・システム・オン・チップ(VSoC)アーキテクチャに基づく効率的処理システムを用いてIDの特徴、例えば1Dバーコードを捕捉、検出および抽出するためのシステムおよび方法を提供する。本発明は、例示的に単一命令複数データ処理(SIMD)アーキテクチャで構成された線形アレイプロセッサ(LAP)を提供し、そこにおいてピクセルアレイの行の各ピクセルは類似の幅のアレイで個々のプロセッサに差し向けられる。ピクセルデータは、潜在的にID状の特徴を含んでいる関心領域(ROI)の大まかな検出と追跡を実行するフロントエンド(FE)プロセスで処理される。ROI検出プロセスは近隣操作におけるLAPの効率を最適化するために2部分で、すなわちピクセルアレイから画像ピクセルを読み出す間に起こる行処理ステップと、典型的に読出しが行われた後に起こる画像処理ステップで行われる。IDを包含したROIのピクセルアレイに対する相対運動が追跡および予測される。任意的にあるバックエンド(BE)プロセスは予測されたROIを用いて画像捕捉後に特徴抽出を実行する。特徴抽出は候補ID特徴を導出し、これらの候補ID特徴は検証ステップによって検証され、検証ステップはIDを確認し、精緻化されたROI、向きの角度および特徴セットを生み出す。これらの候補ID特徴は復号プロセッサまたはその他のデバイスに伝送される。 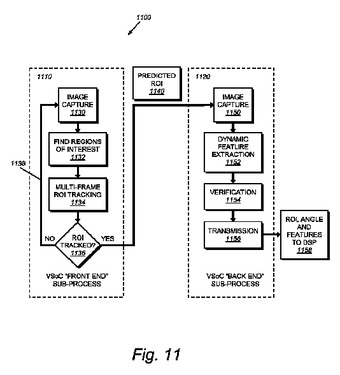 (もっと読む)
(もっと読む)
画像処理方法

【課題】入力画像中における連結画素成分に対するラベリング処理を高速に実行可能な画像処理方法を提供する。
【解決手段】ラベリング処理を1次元SIMD型プロセッサおよび汎用プロセッサを用いて行う画像処理方法であって、1次元SIMD型プロセッサの複数のプロセッサエレメント(PE)に対して、入力画像30の画素配列32における行方向または列方向の複数の画素ライン(PL)を並列に割当て、各PL上での画素成分同士の連結関係を判定し、各PL上の連結画素ブロック(ブロック)毎に、画素配列上での開始位置および終了位置を示す位置情報を取得する第1の仮ラベリング処理と、汎用プロセッサを用いて、位置情報に基づいて、隣接するPL間でのブロック同士の連結関係を判定し、ブロック毎に、画素配列上での開始位置にある画素成分に連結関係に基づく仮ラベルを付する第2の仮ラベリング処理と、を含む。
(もっと読む)
動き検出装置

【課題】回路規模や消費電力を増大させることなく、動き検出の精度を高くする。
【解決手段】プロセッサアレイ20は、1次元アレイ状に接続された複数のPE30を含み、現画像D0と参照画像D1aなどに基づき、複数の動きベクトル候補について並列に差分絶対値和SADを算出する。制御部50は、動きベクトル生成部40で生成された動きベクトルMVに基づき、画像の動きが大きいか否かを判定する。この判定結果に応じて、データ供給部10は異なる広さの探索範囲に対応した参照画像を供給し、プロセッサアレイ20はPE30の接続形態を切り換える。動き検出装置1は、画像の動きが大きいときには、すべてのPE30を用いて所定の探索範囲内で整数精度探索と3種類の半画素精度探索を順に実行し、画像の動きが小さいときには、PE30を4群に分割し、より狭い探索範囲内で4種類の探索を並列に実行する。
(もっと読む)
一体型画像認識装置及び方法
本発明は、ガラス等の透明又は半透明基板内又は上に感光素子を挿入又はエッチングによって情景を取得、読み出し及び知覚できる装置に関する。基板自体は、映した画像に入射する光子を感光素子内へ偏向する光学装置として機能する。感光素子は、透明又は半透明配線で相互接続されている。デジタル式のニューラルメモリは、例えば、人間の顔、向かって来る物体、表面欠陥、フロントガラスの雨粒、その他の特定の視界を認識するように訓練できる。他の用途には車両用画像認識ヘッドライト、及び見ている者の態度(視線追跡、顔認識、表情認識、その他)を感知及び識別しているフラットパネルディスプレイを含む。別の用途には、扉に向かって来る個体の方向及び速度を認識する引き戸を含む。さらに別の用途には、ダム、橋梁、又は他の人工構造物における永久損傷(組成の変化)検知を含む。 (もっと読む)
領域ベース複数パス動き推定及び時間的動きベクトル候補の更新を用いたビデオ処理
本発明は、画像シーケンスの処理対象画像の処理中画像領域を形成する第1画素ブロックの動きベクトルを突き止めるビデオ処理方法及び装置に関する。ビデオ処理装置の処理ユニットはそれぞれの画像領域を、次の画像領域に進む前に2度以上処理して第1画素ブロックの動きベクトルを突き止める。これは、画像シーケンスの先行画像内の第2画素ブロックに関して突き止められた少なくとも1つの時間的候補ベクトルを含む候補ベクトルの組の評価により行われる。当該装置は、処理対象画像の画像領域の2度目の処理を行う前に、先行画像内で処理中画像領域の外側に位置する第3画素ブロックに関して突き止められた時間的候補ベクトルを、処理対象画像内で突き止めた第3画素ブロックの動きベクトルで置き換えて更新する。第1の動き予測パスにて割り当てられた時間的動きベクトル候補を更新することにより、2度目以降の動き予測パス後の動き予測品質が向上される。  (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]