
国際特許分類[A01B63/12]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 農業機械または器具を昇降する,あるいは位置を調整する装置またはそのための配置 (864) | トラクタに装着された作業機のためのもの (696) | 電動機によって操作されるもの (14)
国際特許分類[A01B63/12]に分類される特許
1 - 10 / 14
移動式電動作業機
【課題】作業部の過負荷運転を回避することができる移動式電動作業機を提供する。
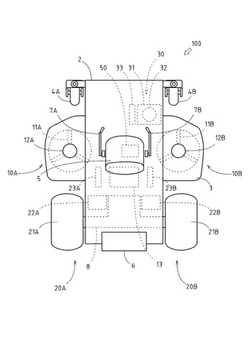
【解決手段】走行部20によって移動しながら、ブレードインバータ14A・14Bから供給される電力により駆動される作業部10A・10Bによって作業を行い、デッキ高さ調整部30によってデッキ3のデッキ高さ位置Hを調整する電動式芝刈作業機100であって、ブレードインバータ14A・14Bからのブレードインバータ電流値Iba・Ibbに基づいて、作業部10A・10Bの作業負荷が一定となるように、デッキ3のデッキ高さ位置Hの調整を制御する。
(もっと読む)
乗用作業車

【課題】車体の走行に伴って車体周囲の作業対象物に対する作業を行う電動式作業デバイスの作業負荷の変動による不都合を低減する乗用作業車を提案する。
【解決手段】駆動車輪ユニットを走行駆動するための走行用電動機ユニットと、目標走行速度を設定するために運転者によって操作される速度設定操作ユニットと、車体の走行に伴って車体周囲の作業対象物に対する作業を行う作業デバイスを駆動するための作業用電動機と、作業用電動機の負荷を評価する作業負荷評価部によって評価された作業用電動機の負荷がしきい値より高い異常負荷である場合に目標走行速度より低い例外速度で走行用電動機ユニットを制御する例外速度制御を実行する例外速度制御部とを備えている。
(もっと読む)
トラクタ
【課題】要求精度を満たしつつ、電動モータのロック回数を減らす。
【解決手段】昇降スイッチレバー23の操作に応じて電動モータ25を駆動制御することにより、作業機を所定の上昇位置及び下降位置まで昇降作動させる昇降スイッチ制御手段を設けたトラクタにおいて、昇降スイッチ制御手段は、電動モータ25から出力されるパルスに基づいてモータ作動体24の位置を特定すると共に、昇降スイッチレバー23の上昇操作に応じてモータ作動体24を上昇側に作動させる際には、モータ作動体24を上昇側の機械的なロック位置まで作動させ、昇降スイッチレバー23の下降操作に応じてモータ作動体24を下降側に作動させる際には、電動モータ25の出力パルスに基づいて特定される下降側の所定位置までモータ作動体24を作動させる。
(もっと読む)
トラクタ
【課題】エンジン始動時の傾斜自動制御を禁止すると共に、複雑な禁止解除操作を行うことなく傾斜自動制御を有効にし、速やかな作業再開を可能にする。
【解決手段】制御装置32に、昇降スイッチレバー23の操作に応じて電動モータ25を駆動制御することにより、作業機を所定の上昇位置及び下降位置まで昇降作動させる昇降スイッチ制御手段と、走行機体1又は作業機の左右傾斜に応じて傾斜制御バルブ14を切り換え制御することにより、作業機を自動的に傾斜作動させる傾斜自動制御手段とを設けたトラクタにおいて、昇降スイッチ制御手段は、電動モータ25から出力されるパルスに基づいてモータ作動体の位置を特定可能であって、エンジン始動時に傾斜自動制御を禁止する傾斜自動禁止手段と、所定の作業機昇降操作に応じて傾斜自動制御の禁止を解除する傾斜自動禁止解除手段とを備える。
(もっと読む)
多目的小型電動式トラクター
【課題】畑作農作業のほとんどを機械化でき、密閉された空間でも作業が可能な多目的小型電動式トラクターと、ユニット化した小型農機具を提供する。
【解決手段】多目的小型電動式トラクター1は、荷物及び各農機具ユニットを載せる荷台8を有し、荷台8を載せる車体フレーム2にはロボットアーム10が設けられている。一対の駆動前輪3a、3bと一対の前輪駆動モータ4a、4bと一対のフリー回転の後輪9a、9bを有し、車体フレーム2に搭載されているウィンチワイヤー巻き取りドラム11と、ドラム駆動するモータ12を有している。荷台8は小型農機具ユニットを搭載して、荷台高さ調整モータ5で上下に移動可能になっている。ロボットアーム10は360度回転可能で3箇所に関節が設けられ、手首は360度回転可能で物体を挟むことが出来る。また手首部分は取り外し可能で、別種の農具を付け替えることが出来る。
(もっと読む)
乗用型田植機
【課題】本発明の課題は、圃場が荒れやすい枕地あるいは枕地近くにおいて適正に整地が行える整地ロータ付きの乗用型田植機を提供することである。また、整地ロータの上下調節及び収納を同じロータ昇降用モータで行って、苗植付作業時に整地ロータを収納位置にしたままで使用できないような不具合を防止できる整地ロータ付きの乗用型田植機を提供することである。
【解決手段】走行車体2の後部に苗植付部4を昇降自在に設けると共に、走行車体2の横幅方向に向けて配置され地面を整地するロータ27a,27bを苗植付部4に対して昇降自在に設けた乗用型田植機において、ロータ27a,27bをロータ昇降用モータ63の作動にて収納状態に自動的に切替え、苗植付作業時にはロータ昇降用モータ63の作動にてロータ27a,27bをロータ高さ調節ダイヤルで設定した高さに自動的に調整する制御装置100を備えた乗用型田植機。
(もっと読む)
作業機
【課題】アタッチメントの昇降駆動機構を数少ない部品でコンパクトかつ安価に構成すると共に、アタッチメントの回動角を十分に確保し、アタッチメントをコンパクトに格納できるようにする。
【解決手段】走行機体100に連結されて所定の作業を行う作業機本体2と、作業機本体2に昇降自在に連結され、作業形態に応じて昇降操作されるアタッチメント3とを備える作業機1において、アタッチメント3と一体的に連結される支持プレート26、27を、作業機本体2側で上下回動自在に支持すると共に、支持プレート26の外周部に形成されるギヤ歯26aにピニオンギヤ28を噛み合わせ、該ピニオンギヤ28の回転駆動によりアタッチメント3を昇降させる。
(もっと読む)
作業機
【課題】アタッチメントを使わない作業においては、アタッチメントを上下反転位置まで上昇させ、コンパクトに格納できるようにする。
【解決手段】走行機体に連結されて所定の作業を行う作業機本体2と、回動支点Aを介して作業機本体2に昇降自在に連結され、作業形態に応じて昇降操作されるアタッチメント3と、作業機本体2とアタッチメント3との間に介設され、アタッチメント3の昇降作動及び/又は昇降補助を行う昇降作動部4とを備える作業機1において、一端がアタッチメント3に上下回動自在に連結される第一リンク6と、一端が作業機本体2に上下回動自在に連結され、かつ、他端が第一リンク6の他端に回動自在に連結される第二リンク7とからなるリンク機構8を構成し、該リンク機構8を介して昇降作動部4をアタッチメント3に連結する。
(もっと読む)
昇降装置
【課題】小型化、省エネ化及び油脂類の削減を実現し、ミッションケースから着脱可能としたトラクタの昇降装置を提供する。
【解決手段】ミッションケース11上にリフトアーム19・19を上下回動自在に支持する昇降装置ケース10を設け、該昇降装置ケース10に駆動モータ14を配設するとともに、該駆動モータ14の駆動軸15とリフトアーム19・19の間にウォームギヤを有する歯車式伝動機構を配置し、該駆動モータ14によりリフトアーム19・19を上下回動可能に構成した。また、前記駆動モータ14、リフトアーム19・19及びウォームギヤを、前記昇降装置ケース10内に一体として配置し、該昇降装置ケース10を前記ミッションケース11から着脱可能とした。
(もっと読む)
作業車の昇降操作構造
【課題】 組み付け性の低下を招くことなく、自動上昇制御後のポジション制御可能時に作業装置が不測に昇降する不都合などを回避する。
【解決手段】 高さ設定レバー15の操作位置に対応する高さ位置まで作業装置7を昇降させるポジション制御と、電動アクチュエータ35の作動で作業装置7を自動上昇させる自動上昇制御と、電動アクチュエータ35の作動で作業装置7を自動下降させる自動下降制御とが可能に構成され、制御手段39が、高さ位置検出手段38の出力と、その出力とレバー位置検出手段49の出力との相関関係とに基づいて、高さ位置検出手段38の出力に対応するレバー位置検出手段49の出力目標値を決定し、かつ、この出力目標値にレバー位置検出手段49の出力値が一致した場合に自動下降制御を行うように構成してある。
(もっと読む)
1 - 10 / 14
[ Back to top ]