
国際特許分類[B25J19/04]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータに適合する付属装置,例.監視のための,探知のための;マニプレータと関連して使用するために結合または特に適用される安全装置 (1,619) | センサー (345) | 視覚装置 (136)
国際特許分類[B25J19/04]に分類される特許
1 - 10 / 136
自動制御装置
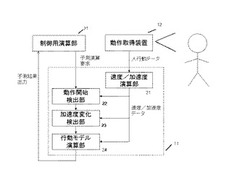
【課題】 3次元画像センサを用いて、初動動作から最終的な指示座標を予測する自動制御装置および制御プログラムを提供する。
【解決手段】 3次元画像センサによって取得される画像フレームの前後を比較して人の特定部位の変位量を検出する変位量検出手段と、変位量および画像フレームの取得時間から特定部位の速度を算出する速度演算手段と、速度の変化量から特定部位の加速度を算出する加速度演算手段と、加速度の変化量から加速度が極大となったか否かを判断する加速度判断手段と、特定部位の移動開始から加速度が極大となるまでの時間および加速度が極大となった時の特定部位の位置に基づき、特定部位が動作を終了する位置を算出する動作終了位置演算手段と、その演算結果を出力する出力手段とを備えた。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム

【課題】様々な位置姿勢や形状のワークの輪郭線を、精度良く抽出可能な画像処理装置及び画像処理方法並びに画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像取得部31と、元画像を2値化して元画像からワークの概略領域を特定する領域特定部32と、概略領域を膨張処理する領域膨張処理部34と、膨張処理された概略領域の境界線上に、複数の基準点を設定する基準点設定部35と、元画像から複数のエッジを抽出するエッジ抽出部33と、抽出された複数のエッジと基準点設定部35により設定された複数の基準点とを合成し、複数のエッジの中から複数の基準点のそれぞれに対して予め定められた位置にあるエッジを選択する輪郭エッジ選択部36と、選択された複数のエッジから連続したワークの輪郭線を抽出する輪郭線抽出部37と、を備えた画像処理装置。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】ワークを搬送する経路上の状態把握を支援するための情報を出力する。
【解決手段】画像処理装置は、連続する撮像の前後で撮像範囲に重複領域を有する撮像部110に接続される画像処理装置であって、撮像部110によって得られる複数枚の撮像画像を受け付けるインターフェイスと、撮像画像に対する計測処理を行うことにより、当該撮像画像中の被写体の計測結果を取得する計測手段と、複数枚の撮像画像を、前記重複領域に対応する重なり範囲で撮像順に重なり合うように合成し、且つ前記重なり範囲における前記被写体の計測結果を当該重なり範囲において重畳させた合成画像を生成する合成手段と、合成画像と、当該合成画像に関連付けて重なり範囲を示す情報とを出力する出力手段と、を備える。
(もっと読む)
衝突検出システム、ロボットシステム、衝突検出方法及びプログラム
【課題】 衝突検出対象オブジェクトの正確な衝突判定を実現できる衝突検出システム、ロボットシステム、衝突検出方法及びプログラム等を提供すること。
【解決手段】 衝突検出システムは、処理部10と、描画処理を行う描画部30と、衝突検出対象オブジェクトの外殻内面を見る視点を設定する視点設定部40とを含み、描画部30は、視点設定部40で設定された視点から見たときの衝突検出対象オブジェクトを描画する第1の描画処理を行うとともに、衝突検出対象オブジェクトの外殻内面のうち、第1の描画処理により描画された領域に対応する各ピクセルの深度値を生成し、生成した深度値に基づいて、衝突検出対象オブジェクト以外の他のオブジェクトを描画する第2の描画処理を行い、処理部10は、第1の描画処理と第2の描画処理の結果に基づいて、衝突検出対象オブジェクトが他のオブジェクトと衝突したか否かを判定する。
(もっと読む)
移動環境認識装置及び方法
【課題】高精度に測定対象の形状認識情報を得る。
【解決手段】測定対象までの距離画像データを得る距離画像測定工程ステップST1と、この距離画像測定工程で得た距離画像データに基づき、所定のデータの集合体からなるラベリング領域を作成するラベリング処理工程ステップST2〜ステップST7と、このラベリング処理工程で作成した複数のラベリング領域に基づいて複数の上面データを形成する上面データ形成工程ステップST8と、この上面データ形成工程で形成した複数の上面データに基づいて測定対象の形状を認識する形状認識工程ステップST9〜ステップST13と、を備えた移動環境認識方法である。
(もっと読む)
情報取得装置、情報取得方法、情報取得プログラム、及び、情報取得システム
【課題】移動可能なノードが複数存在する空間において、位置認識の確実性を向上させる。
【解決手段】作業空間内の各ロボット100は、3つの他のロボット100からの光を受けて、当該他のロボット100の絶対位置の情報を取得することにより、自己の絶対位置を判別する。また、作業空間内の各ロボット100は、2つの他のロボット100からの光を受けて、当該他のロボット100の絶対位置の情報と、当該他のロボット100の位置から自ノードであるロボット100への絶対方位の情報とを取得することにより、自己の絶対位置を判別する。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】部品91の三次元認識を正確に実行する。
【解決手段】互いに異なる場所から部品91を撮像した2枚の撮像画像I1、I2に対してステレオマッチング処理が実行されて、2枚の撮像画像I1、I2間の視差pを示す視差画像Isが取得される。また、撮像画像I1からエッジEが抽出されて、部品91のエッジEを示すエッジ画像Ieが取得される。そして、エッジ画像Ieが示す部品91のエッジE上の位置での視差pが、視差画像Isに含まれる視差pから抽出されるとともに、こうして抽出された視差pに基づいて、三次元における部品91の位置および姿勢が認識される。これにより、部品91のエッジE部分の視差pに基づいて、三次元における部品91の位置および姿勢を認識することが可能となり、その結果、この三次元認識を正確に実行することが可能となる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】画像のノイズに影響を受けずに対象画素の拡散反射成分を分離する方法の提供。
【解決手段】本実施形態の画像処理装置は、入力画像に含まれる画素の色相を算出する色相算出部と、前記入力画像に含まれる対象画素の画素値に応じて基準を設定し、前記基準よりも前記対象画素に近い色相を有する画素を含む第1のグループを抽出する抽出部と、前記第1のグループに含まれる画素及び前記対象画素の色度を算出する色度算出部と、前記第1のグループに含まれる画素及び前記対象画素の色度を用いて、推定される拡散反射率を算出する拡散反射率算出部と、前記拡散反射成分を用いて、前記対象画素の画素値から前記拡散反射率の変動に応じて変化する画素値の成分を示す拡散反射成分を分離する分離部とを有する。
(もっと読む)
物体姿勢推定方法、物体姿勢推定装置、物体推定姿勢精緻化方法、およびコンピューター可読媒体
【課題】物体を、ロボットの搭載カメラから見える通りのその姿勢にかかわらず認識することができるようにする。
【解決手段】物体を包含する画像を入力し、入力画像の2値マスクを作成、入力画像の2値マスクからシングレットのセットを抽出する。各シングレットは、入力画像内の物体の内側および外側輪郭内にある点を表す、抽出することと、シングレットのセットを連結し、デュプレックス行列として表されるメッシュにし、候補姿勢のセットを作るべく2つのデュプレックス行列を比較するこし、物体姿勢推定値によって、入力画像から物体の姿勢が推定され、次に、物体姿勢推定が記憶される。物体の推定姿勢は、カメラのパラメーターの入力、物体のモデルを物体の仮想画像に投影、初期姿勢パラメーターを新しい姿勢パラメーターに更新、エネルギー関数の最小化によって精緻化される。
(もっと読む)
1 - 10 / 136
[ Back to top ]