
国際特許分類[B60K28/08]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両の推進装置または動力伝達装置の配置または取付け;複数の異なった原動力の配置または取付け;補助駆動装置;車両用計装または計器板;車両の推進装置の冷却,吸気,排気または燃料供給に関する配置 (25,396) | 車両に特に適合されまたは配置される推進装置制御用の安全装置,例.潜在的な危険状態時の燃料供給または点火の阻止 (510) | 積荷に関する状態,例.積荷過剰,に応じるもの (3)
国際特許分類[B60K28/08]に分類される特許
1 - 3 / 3
片荷判定装置
【課題】簡素な構成で走行中の車両の片荷状態を正確に判定し得る片荷判定装置を提供する。
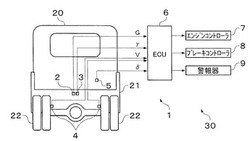
【解決手段】片荷判定装置1は、車両20の車幅方向の加速度Gyを検出するGセンサ2(横加速度検出手段)と、車両20のヨーレイトγを検出するヨーレイトセンサ3(ヨーレイト検出手段)と、車両20の車速Vを検出する車速センサ4(車速検出手段)と、ECU6とを備えており、ECU6は、車両20の加速中又は減速中の相異なる複数の車速Vにおけるヨーレイトγの絶対値が全て所定の閾ヨーレートγk以下である場合に、車両20が略平坦な路面を略直進していることを判定するヨーレイト判定部(走行状態判定手段)と、ヨーレイト判定部により車両20が略平坦な路面を略直進していることが判定されている場合に、横加速度Gyに基づいて車両20が片荷状態であることを判定する片荷判定部(片荷判定手段)とを備えている。
(もっと読む)
横転警報装置、車両、および横転警報方法、並びにプログラム

【課題】簡単な処理により、運転開始に先立って、運転者が車両の横転し易さを直接的に把握すること。
【解決手段】車両のロール角度を所定のサンプリング周期毎に記憶するロール角度記憶部23と、エアベローズ内の空気圧の変化に応じ、荷台への貨物の積載開始を判定し、荷台への貨物の積載開始を判定したときからの空気圧の変化に応じ、荷台への貨物の積載完了を判定し、積載完了と判定した時刻とその所定期間前の時刻との間にロール角度記憶部23に記憶されたロール角度のサンプリング値の平均値から積載開始と判定した時刻とその所定期間前の時刻との間にロール角度記憶部23に記憶されたロール角度のサンプリング値の平均値を減算してロール角度を取得するロール角度検出部21と、ロール角度を横転の危険性を示す指標として表示画面24に表示する表示制御部22と、を有する横転警報装置20を構成する。
(もっと読む)
車両とその制御方法
【課題】ユーザを乗せて自律移動するロボットと連結できるか否か判断し、それを外部に表示する車両とその制御方法とを提供すること。
【解決手段】本発明にかかる車両は、ユーザを乗せて自律移動するロボット40と連結することのできる車両10であって、当該ロボット40から送られる当該ロボットに関する情報を受信する通信部16と、ロボット40を10車両に連結するための連結部12と、通信部16からのロボット40に関する情報に基づき車両10とロボット40とが連結できるか否かを判定する判定部11と、判定部11の判定結果を外部に通知する通知部14とを有する。
(もっと読む)
1 - 3 / 3
[ Back to top ]