
国際特許分類[B60L3/10]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 電気的推進車両の推進装置;車両用磁気的懸架または浮揚装置;電気的推進車両の変化の監視操作;電気的推進車両のための電気安全装置 (20,799) | 電気的推進車両の保安目的の電気的装置;変化,例.速度,減速,動力の消費,の監視操作 (3,862) | 車輪の滑り表示 (7)
国際特許分類[B60L3/10]に分類される特許
1 - 7 / 7
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
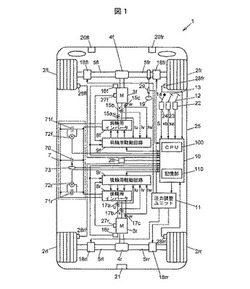
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
倒立振子型車両の制御装置

【課題】空転検知可能な移動動作部の構成の限定が少なく、検知可能な空転の限定が少ない空転検知を行なうことが可能な倒立振子型車両の制御装置を提供する。
【解決手段】制御ユニット50は、基体9の傾斜角速度の計測値θbdot_xy_sと車両1の重心速度推定値Vb_xyとから車両1に作用する床反力Fを算出し、その算出した床反力Fを発生するときに車輪体5に付与する必要があるトルクTを算出する。また、制御ユニット50は、決定した制御用操作量の目標値を規定するトルクTを推定する。そして、制御ユニット50は、これらのトルクTの差に基づいて、車輪体5の空転発生を検知する。
(もっと読む)
倒立振子型車両の制御装置
【課題】空転検知可能な移動動作部の構成の限定が少なく、検知可能な空転の限定が少ない空転検知を行なうことが可能な倒立振子型車両の制御装置を提供する。
【解決手段】制御ユニット50は、基体9の傾斜角速度の測定値θbdot_xyz_sに基づいて、車両1の重心速度Vb_xy_exp1を推定すると共に、基体9の傾斜角速度の計測値θbdot_xy_sに基づいて、車両1の重心速度Vb_xy_exp2を推定する。そして、制御ユニット50は、これら推測値の差Vb_xy_difに基づいて、車輪体5の空転発生を検知する。
(もっと読む)
電源制御システム
【課題】燃料電池自動車の駆動輪が空転しても電子部品が破壊されたり燃料電池が劣化させられたりしないようにすること。
【解決手段】ECU40は、燃料電池自動車の駆動輪の空転が開始したことを検出したときに、燃料電池昇圧コンバータ14を制御する第1のコンバータ制御回路51に与える通流率の上限値の使用を決定し、第1のコンバータ制御回路51に与えられる通流率を監視し、通流率がその上限値を超過している場合に、その上限値を第1のコンバータ制御回路51に与えるようにする。
(もっと読む)
スリップ率推定装置及びスリップ率制御装置
【課題】車体速度の検出を必要としない制動時のスリップ率推定装置を提供すること。
【解決手段】スリップ率推定装置は、モータのトルクで駆動輪を駆動する自動車に実装され、駆動輪の回転速度ωおよび回転加速度ωdotを算出する車両モデル演算装置と、モータトルク測定手段が測定したトルクTと車両モデル演算装置が算出した回転速度ωおよび回転加速度ωdotを用いて、スリップ率λhatを算出するスリップ率演算装置からなる。スリップ率演算装置がスリップ率の時間変化を考慮した常微分方程式を解くことにより、車体速度を検出することなく高精度なスリップ率推定を行うことができる。
(もっと読む)
自動車およびその制御方法
【課題】 バッテリの残容量(SOC)の目標値を設定する際にユーザの利便性の向上を図ると共に4輪駆動走行をするときにモータを継続して駆動する。
【解決手段】 エンジンからの動力を前輪に出力して走行すると共にモータからの動力を後輪に出力して走行する4駆走行条件の成立頻度Navが閾値Nthより高いときには、バッテリの残容量(SOC)の目標値SOC*を成立頻度Navが閾値Nth未満のときよりバッテリからモータに供給する電力が大きくなる値SOC2(90%)に設定する(ステップS220,S240)。成立頻度Navに応じて目標値SOC*を設定するからスイッチ操作により目標値を変更するものと比較してユーザの利便性の向上を図ることができる。また、4駆走行条件の成立頻度Navが高いときには目標値SOC*をより高い値に設定するからモータをより継続して駆動させることができる。
(もっと読む)
電気車の制御装置
【目的】本発明は、電気車の制御装置に係り、インバータの出力周波数指令を基本的には誘導電動機の回転周波数に依存させないで、しかもインバータの出力電流は定電流制御系により制御して、過電流になりにくくて、電流指令相当のトルクで車両を加速/減速できる制御装置を提供することにある。
【構成】インバータ出力周波数指令を周波数時間変化率指令に基づいて増加/減少させ、その周波数時間変化率指令を電流制御系により制御するように構成した。
【効果】本発明によれば、インバータの出力周波数指令は基本的には誘導電動機の回転周波数に依存せず、しかもインバータの出力電流は定電流制御系により制御されるので、過電流になりにくくて、電流指令相当のトルクで車両を加速/減速できるという効果がある。
(もっと読む)
1 - 7 / 7
[ Back to top ]