
国際特許分類[B60Q1/076]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両一般の信号装置または照明装置の配置,その取付または支持,またはそのための回路 (4,555) | 光学的信号または照明装置の配置,その取付けまたは支持またはそのための回路 (3,154) | その装置が主として前方路上を照明または路上の他の範囲または周囲を照明するもの (1,754) | その装置がヘッドライトであるもの (1,415) | 調節可能なもの,例.車室内から遠隔操作するもの (661) | 電気的手段によるもの (45)
国際特許分類[B60Q1/076]に分類される特許
1 - 10 / 45
アクチュエーター及び車輌用前照灯
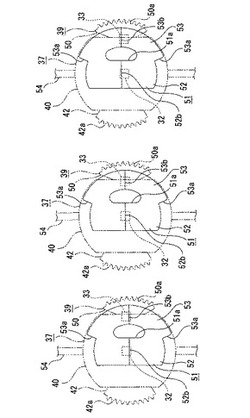
【課題】 初期位置の検出時間の短縮化及び幻惑光の発生を防止する。
【解決手段】 ランプユニット10に連結される出力軸部41を有し少なくとも出力軸部が前後方向へ移動可能とされると共に水平方向において回動可能とされた連結ユニット34を備え、出力軸部が前後方向へ移動されてランプハウジング2が回動されて光の照射方向の調整動作であるレベリング動作が行われ、出力軸部が水平方向へ回動されてランプハウジングが回動されて光の照射方向の調整動作であるスイブル動作が行われ、磁極の第1の境界52bを検出することにより連結ユニットの前後方向における移動位置を検出する第1の磁気検出部32と、磁極の第2の境界53bを検出することにより連結ユニットの水平方向における回動位置を検出する第2の磁気検出部33とを設け、第1の境界と第2の境界を連結ユニットに設けた。
(もっと読む)
制御装置および制御方法

【課題】複数の半導体光源を利用して実現された前照灯を制御する際、複数の半導体光源の制御に係る情報の伝達速度を向上する。
【解決手段】制御装置100は、動作モードに応じて照射領域の中で部分的に明るさの変更が可能な車両用前照灯を、複数のLEDを利用して実現したとき、車両用前照灯を制御する制御装置である。制御装置100は、動作モードのオンオフを示すとともに、動作モードがオンの場合に明るさを変更すべき照射領域の部分を指定するモード情報を第1通信回線LINを介して受信するモード情報受信部と、受信されたモード情報が動作モードのオンを示す場合、モード情報が指定する照射領域の部分に基づき各LEDの状態を決定する状態決定部と、各LEDを、それが状態決定部によって決定された状態となるよう制御する光源制御部と、を備える。
(もっと読む)
車両用スポットランプ制御装置および車両用スポットランプシステム
【課題】車両との衝突を回避すべき対象物の存在を運転者に適切に認識させる。
【解決手段】スポットランプECUにおいて、歩行者位置取得部は、位置検出装置によって検出された歩行者位置を取得する。車両用スポットランプは、複数の発光素子を有し、複数の発光素子の点灯を制御することで照射方向および照射形状を変更可能に設けられている。点灯制御部は、車両用スポットランプによる光の照射を制御する。点灯制御部は、歩行者位置と車速とを用いて車両が歩行者に衝突する危険度を判定し、危険度が所定の条件を満たすほど高くなったときに、照射幅が縮小と拡大を繰り返しながら歩行者位置に向けて光が照射されるよう、車両用スポットランプによる光の照射を制御する。
(もっと読む)
車両用前照灯
【課題】光偏向器の反射部を駆動するアクチュエータの負担を軽減するとともに、アクチュエータの耐久性を向上させた車両用前照灯を提供する。
【解決手段】内側圧電アクチュエータ31,32及び外側圧電アクチュエータ51,52は、レーザ光源11からの光が入射される反射部2をX軸回り及びY軸回りにそれぞれ回動させて、車両前方の照射領域を反射部2からの反射光で左右方向及び上下方向に走査する。制御部12は、反射光の上下方向走査周波数(Y軸回りの回動周波数)が左右方向走査周波数(X軸回りの回動周波数)より大きくなるように、内側圧電アクチュエータ31,32及び外側圧電アクチュエータ51,52を制御する。
(もっと読む)
車両用前照灯の点灯制御装置、車両用前照灯システム
【課題】自車両の前方の曲路に存在する前方車両に対してグレアを与えることを回避する。
【解決手段】車両用前照灯の点灯制御装置は、自車両の前方を撮影して得られた画像に基づいて対象車両の位置情報を時系列で検出する位置情報検出部と、位置情報検出部によって時系列で検出される位置情報を格納する位置情報格納部と、位置情報格納部に格納された現在及び過去の位置情報に基づいて、自車両と対象車両との相対的な角速度と角加速度の少なくとも一方を演算する演算部と、位置情報格納部に格納された現在の位置情報と演算部による演算結果に基づいて、角速度及び角加速度の少なくとも一方が大きいほど水平方向の幅が大きくなるようにして遮光範囲を設定する遮光範囲設定部と、遮光範囲設定部によって設定される遮光範囲に基づいて前照灯を駆動する前照灯制御部を備える。
(もっと読む)
車両用灯具の配光制御装置、車両用灯具の配光制御システム
【課題】簡素な構成によって自車の前照灯による配光状態を制御する。
【解決手段】配光制御システムは、画像処理装置の検出結果に基づいて対象車両の各外縁の位置を示す角度θ1、θ2を求め、それに基づいて自車両の前照灯による照射範囲を規定する角度を算出し、その算出結果に基づいて配光状態を制御するための配光信号を出力する。照射範囲を規定する角度は角度θ1、角度θ2とによりそれぞれ定められる。前記自車両の右側前照灯による照射範囲を規定する角度は、第1の係数を(θ1−θ2)に乗算した値を角度θ2から減算することによって定め、左側前照灯による照射範囲を規定する角度は、第2の係数を(θ1−θ2)に乗算した値を角度θ1に加算することによって定められる。
(もっと読む)
車両用前照灯
【課題】駆動力伝達機構のラックとピニオンとの間の負荷を小さく維持することができ、かつ、可動リフレクタの停止位置の位置精度を高精度に維持することができること。
【解決手段】この発明は、半導体型光源2U、2Dと、反射面10U、10Dを有する固定リフレクタ3と、反射面12U、12Dを有する可動リフレクタ4U、4Dと、ソレノイド5と、駆動力伝達機構6と、を備える。駆動力伝達機構6は、ラック14と、ピニオン15U、15Dと、から構成されている。ラック14の両端部の歯部17U、17Dの高さH1は、ラック14の中間部の歯部17U、17Dの高さH2と比較して高い。この結果、この発明は、ラック14とピニオン15U、15Dとの間の負荷を小さく維持することができ、かつ、可動リフレクタ4U、4Dの停止位置の位置精度を高精度に維持することができること。
(もっと読む)
車両用前照灯
【課題】駆動力伝達機構のラックとピニオンとの間の負荷を小さく維持することができ、かつ、可動リフレクタの停止位置の位置精度を高精度に維持することができること。
【解決手段】この発明は、半導体型光源2U、2Dと、反射面10U、10Dを有する固定リフレクタ3と、反射面12U、12Dを有する可動リフレクタ4U、4Dと、ソレノイド5と、駆動力伝達機構6と、を備える。駆動力伝達機構6は、弾性変形するラック14と、ピニオン15U、15Dと、から構成されている。この結果、この発明は、ラック14とピニオン15U、15Dとの間の負荷を小さく維持することができ、かつ、可動リフレクタ4U、4Dの停止位置の位置精度を高精度に維持することができること。
(もっと読む)
前照灯配光制御装置
【課題】前方車両の一対のランプのうち片方が点灯していない場合であっても、前方車両の運転者を幻惑しないような前照灯の照射方向の制御を行う前照灯配光制御装置を提供する。
【解決手段】自車両50前方の画像を取得し、取得画像から前方車両60画像を抽出すとともに、レーダで、自車両50から前方車両60までの距離を取得する。取得した距離が所定の値より小さい場合に、抽出した前方車両画像から前方車両のランプ62,64を抽出し、抽出したランプ62,64が両灯点灯状態か片灯点灯状態かを判定する。前方車両のランプが両灯点灯状態であると判定した場合は、自車両50の前照灯52,54の照射領域内において、前方車両のランプ62.64を含む領域を照射しないように遮蔽領域を設定し、片灯点灯状態であると判定した場合には、遮蔽領域を、両灯点灯状態であると判定した場合の遮蔽領域よりも左右に広いマージン角α、βを持たせて設定する。
(もっと読む)
車両用前照灯の配光制御装置
【課題】配光の追従制御による前方車両に対する眩惑を防止するとともに、自車の運転者に対する配光制御の煩わしさを解消することを可能にした配光制御装置を提供する。
【解決手段】自車の前方に存在する車両の車両位置に基づいて自車の前照灯の配光を追従制御する手段101,103,104を備える配光制御装置100であって、自車の前方の道路状況を判定し(102)、当該道路を曲路と判定したときに配光を追従制御する速度を直進路のときよりも高速に設定する応答性制御手段105を備える。
(もっと読む)
1 - 10 / 45
[ Back to top ]