
国際特許分類[B62D1/24]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 操向制御装置,すなわち,車両の方向変化を起こさせる装置 (3,356) | 車両に取付けられていないもの (30)
国際特許分類[B62D1/24]の下位に属する分類
機械的なもの,例.無荷重軸受の案内によって (7)
非機械的なもの (14)
国際特許分類[B62D1/24]に分類される特許
1 - 9 / 9
駐車場の自動駐車システム
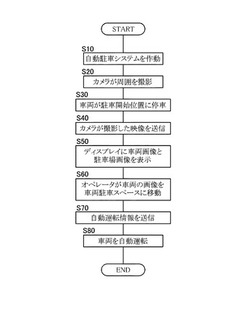
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
移動運搬手段のためのステアリング機構のユニバーサル作動および制御

【課題】ユニバーサルで、様々な異なる種類の運搬手段による使用のために、容易に取り付けられ、実装され得るような無人運搬手段用の遠隔ナビゲーションシステムを提供する。
【解決手段】移動運搬手段のステアリング機構用の作動および制御システム2であって、該システム2は、2つの反対の方向に回転可能である駆動軸を含むモータ4と、該移動運搬手段の該ステアリング機構に固定されるように構成される固定構造40と、該モータ4を該固定構造40と結合するリンク構造20であって、それにより、該駆動軸の回転運動が該固定構造40に伝えられて、該移動運搬手段の該ステアリング機構の制御を容易にする、リンク構造20とを備える、システム。
(もっと読む)
駐車支援装置
【課題】目標駐車位置およびそこに至る軌跡におけるカメラの死角を低減する駐車支援装置を提供する。
【解決手段】駐車支援装置は、目標側装置10および車両側装置20を含む。目標側装置10は、目標側カメラ11および送信装置12を備える。目標側カメラ11は、駐車の開始時点において車両Vを撮影するとともに、駐車の開始時点以降、完了時点まで、駐車スペースSまたは駐車軌跡Lを撮影する。目標側カメラ11が撮影した画像は、送信装置12によって車両側装置20に送信される。車両側装置20は、送信された画像を受信装置23によって受信する。
(もっと読む)
有人無人運転切替可能な車両
【課題】運転モードに応じて操舵用ハンドルの上方をカバーで覆うことが可能な有人無人運転切替可能な車両を提供する。
【解決手段】操舵用ハンドルの近傍に、当該操舵用ハンドルの上方を覆うことが可能なカバーが設けられており、手動ステアリングモード時には前記カバーが予め決められた収納位置に収納され、自動ステアリングモード時には前記カバーが前記操舵用ハンドル部分のみを覆うようにして位置する。この際、運転席側の車両側面部分に、ヒンジ2箇所で連結された2つの部材より成るカバーを設け、有人運転時には、2つのカバー部材を共に下側方向に倒すことで、車両側面部に沿った状態でカバーが収納でき、無人運転時には、2つのカバー部材を共に引き上げることで、操舵用ハンドル部分の上方をヒサシ状に覆う構造とし、更に、カバー部材の位置を検知可能なセンサを設けて、運転モードが自動的に切り替わる構造であることが好ましい。
(もっと読む)
有人無人運転切替可能な車両
【課題】運転モードに応じて操舵用ハンドルの上方をカバーで覆うことが可能な有人無人運転切替可能な車両を提供する。
【解決手段】操舵用ハンドルの上方を覆うことが可能なカバーが設けられており、当該カバーが、手動ステアリングモード時には前記操舵用ハンドルよりも上側に位置する収納位置に収納され、自動ステアリングモード時には前記収納位置から移動されて前記操舵用ハンドル部分のみを覆うようにして位置し得るようになっている。この際、操舵用ハンドルよりも上側の位置で、しかも、当該操舵用ハンドルの上方を覆うことのない位置に、車両の運転モードを制御するための制御ボックスを設け、この制御ボックスの底側部及び/又は側面部にカバーが収納される構造とし、カバーの位置を検知可能なセンサを設けて、運転モードが自動的に切り替わるようにすることが好ましい。
(もっと読む)
車両制御装置および車両制御方法
【課題】車外からタイヤを確認しながらタイヤ向きを簡単に調整することを課題とする。
【解決手段】キー信号の受信状態に応じて、ワイヤレスキーによるキー操作が車両のドア錠を操作するためのドア錠操作指示ではなく、車両のタイヤ向きを操作するためのタイヤ向き操作指示であるかを判別し、キー操作がタイヤ向き操作指示であると判別された場合に、車両のタイヤ向きを操作するようにタイヤ操舵部を制御する。例えば、車両のタイヤ向きに対する操作を開始した後に、キー信号を継続して受信している間は、車両のタイヤ向きに対する操作を継続するようにタイヤ操舵部を制御する。
(もっと読む)
移動体の自動運転装置
【課題】本発明は、移動体の自動運転装置に関し、乗員の運転モラルの低下を防止しつつ自動運転を実行することにある。
【解決手段】自動運転装置に、乗員のステアリング操作を伴うことなく移動体を道路上の車線に沿って走行させる車線維持制御を実行させる。車線維持制御の実行を、乗員がステアリングホイールを握っている或いはステアリングホイールに触れている場合に許容し、乗員がステアリングホイールに触れていない場合に禁止・解除する。
(もっと読む)
車両誘導装置
【課題】 車外から車両を誘導する場合に、操作に熟練を必要とせず、より簡単に誘導操作を行うことができ、しかも、安価な車両誘導装置にすることができること。
【解決手段】 車両誘導装置30は、撮像手段31・・・と誘導制御部40と携帯式ポイント指示器50とからなる。携帯式ポイント指示器50は、撮影エリアAL,ARのうち、操作者Mnの任意な位置に指示ポイントPiを投射するレーザポインタである。誘導制御部40は、撮像手段31・・・にて撮影した指示ポイントPiの位置Qpを認識するポイント認識手段と、ポイント認識手段にて認識した指示ポイントPiの位置Qpに車両10を移動させるべく移動軌跡を演算する演算手段と、移動軌跡に沿わせて車両10を移動させるように移動手段18に制御信号を発する移動制御手段とからなる。
(もっと読む)
車両
【課題】 車両外において車両を移動させることができる車両を提供する。
【解決手段】 4輪ホイールモータを備えた車両の車体両側面に、操作パネルを配置する。操作パネルには、操作者がいる方向には車両が移動しない範囲が入力範囲として表示されている。操作者が操作パネルの、モード切替スイッチを押し、入力範囲表示の範囲内で操舵ボタンを、出力させたい駆動力に応じた力で操舵方向に移動する。車両の制御装置は、モード切替スイッチがオンにされると、障害物を検出し、車両周囲に存在する障害物の存在と、その方向を警告表示する。そして、駆動輪を入力された操舵方向まで操舵した後、駆動輪を駆動して入力された方向に車両を移動させる。車両の駆動は、操作者が操舵ボタンをデフォルト位置に戻した時点、又は、移動方向に障害物が検出された時点で停止する。
(もっと読む)
1 - 9 / 9
[ Back to top ]