
国際特許分類[B62D11/02]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 転向できない車輪の操向;無限軌道帯または類似のもの (460) | 車両の両側に配された接地装置の差動によって操向されるもの (458)
国際特許分類[B62D11/02]の下位に属する分類
別々の動力源によるもの (99)
単一の主動力源によるもの (355)
国際特許分類[B62D11/02]に分類される特許
1 - 4 / 4
自動車
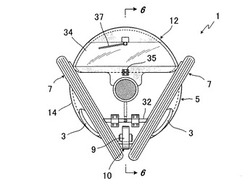
【課題】 運転席が設けられたケース体の両側にほぼV字状に配置した左右の車輪で、運転時の視界を妨げられることなく、オートバイのように走行できるとともに、転倒することなく、安全で注目を集めることができる自動車を得る。
【解決手段】 ほぼV字状に左右の車輪が回転可能に取付けられるように両側部位に左右の車輪取付体が形成され、内部に運転者が該車輪取付体に形成された足出し孔より外に出して座ることができる運転席を有するケース体と、このケース体の左右の車輪取付体に回転可能に取付けられた左右の車輪と、この左右の車輪を回転駆動させる前記ケース体に取付けられた駆動装置と、前記ケース体の下部寄りの中央部に前後方向に位置調整可能に取付けられた両端部にローラが取付けられた位置制御装置と、前記運転席に座った運転者が操作できるように、前記ケース体内に取付けられた前記左右の車輪の回転速度を制御できるハンドルとで自動車を構成する。
(もっと読む)
移植機

【課題】旋回中のスリップなどに影響を受けることなく、一定のタイミングで植付クラッチを自動的に入操作し、各行程の植付開始位置を精度良く揃える。
【解決手段】走行機体1に連結される植付部3と、該植付部3への動力供給を入切する植付クラッチとを備える乗用田植機(移植機)において、走行機体1の左車輪回転及び右車輪回転を検出し、その検出信号に基づいて植付クラッチを自動的に入操作する制御装置9を備え、該制御装置9は、左右車輪8の回転差が所定以上となることに基づいて旋回開始を判断し、旋回開始判断後、左右車輪8の回転差が所定以下となることに基づいて旋回終了を判断し、さらに、旋回終了を判断してから所定距離走行後に植付クラッチを自動的に入操作する。
(もっと読む)
装軌全地勢走行車
【課題】 特定運転状況に対する車両のバランスを適合させるべく、運転者の移動を可能にする装軌ATVを提供することにある。
【解決手段】本発明は、内燃機関により駆動される1対の平行無限軌道(5)により完全に支持され、駆動されかつ操舵される装軌ATVに関する。ステアリング手段(15)は、両軌道(5)間の差動を制御して車両を操舵するように構成されている。ハンドルバー(15)が運転者シート(16)の前方で車両ボディ(1)に枢着されており、ハンドルバー(15)を旋回することにより車両の操舵を行う。本発明の他の態様によれば、運転者シート(16)は跨座式シートであり、フットレスト(9)が、このシート(16)の左側および右側でボディ(1)に配置されており、該フットレスト(9)は、軌道(5)の上方走行部(11)と下方走行部(10)との間の垂直方向位置にある。
(もっと読む)
自走台車の走行制御方法
【課題】 本発明は、自在車輪を備える自走台車のスイッチバック動作時に、自在車輪の作用により自走台車に起きる左右の横揺れを低減する技術を提供することを課題とする。
【解決手段】 基本ライン51に沿って往復走行させることを基本とする自走台車10の走行制御方法において、走行制御部18は、方向変更指令を受けたときに停止時に操舵駆動輪12を所定角度θだけ操舵する第1操舵工程54と、この状態で所定距離Lを前進させることで基本ライン51から離脱させる工程55と、基本ライン51に向けて操舵する第2操舵工程56と、この状態で所定距離Lを前進させて基本ライン51まで自走台車10を戻す工程57と、自走台車10が基本ライン51に到達したときに操舵を戻して自走台車10を基本ライン51に沿って走行させる第3操舵工程58とからなる一連の制御を実施するものである。
(もっと読む)
1 - 4 / 4
[ Back to top ]