
国際特許分類[B62D11/04]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 転向できない車輪の操向;無限軌道帯または類似のもの (460) | 車両の両側に配された接地装置の差動によって操向されるもの (458) | 別々の動力源によるもの (99)
国際特許分類[B62D11/04]に分類される特許
1 - 10 / 99
インホイールモータを利用した車両制御方法
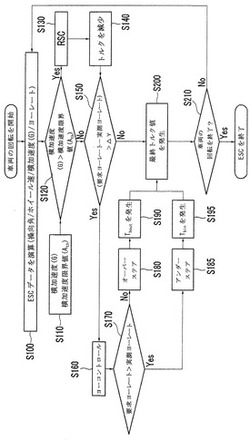
【課題】車体の安定性を確保するために、ESCシステムではなくインホイールシステムを利用することにより、車両を安定的に制御することができるインホイールモータを利用した車両制御方法を提供する。
【解決手段】操向角、ホイール速度、横加速度、ヨーレートを演算する段階、横加速度と予め設定された横加速度限界値を比較する段階、操向角、ホイール速度に基づいた運転手が要求する要求ヨーレートと車両の実測ヨーレートの差を予め設定されたヨーレートコントロール基準値と比較する段階、要求ヨーレートと実測ヨーレートの差がヨーレートコントロール基準値よりも大きい場合には、要求ヨーレートと実測ヨーレートを比較する段階、要求ヨーレートと実測ヨーレートの差によって最終トルク値を発生させる段階を含むことを特徴とする。
(もっと読む)
クローラ式車両

【課題】路面状況等に拘らず、作業者が意図する方向に向けて走行させることが可能な高所作業車を提供する。
【解決手段】高所作業車は、クローラ装置の走行作動を操作するための操作レバー51と、操作レバーの傾倒方向および傾倒量を検出するX軸検出器およびY軸検出器と、クローラ装置の走行作動を制御するコントロールユニットとを備え、操作レバーの中立位置から前方への傾倒操作領域が、低速前進領域F1および高速前進領域F2からなり、コントロールユニットは、操作レバーが高速前進領域F2にある状態から右方に傾倒操作されたときには、左クローラ装置を操作レバーの前後への傾倒量に対応した回転速度で正転させ、右クローラ装置を、左クローラ装置の回転速度よりも所定出力だけ低く設定された回転速度を操作レバーの右方への傾倒量に対応させて低下させて設定された低下回転速度で、左クローラ装置と同一方向に回転させる。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
作業車
【課題】走行状態指令手段の指令情報に基づいて、定格領域を越えるような出力制限領域にて制御指令用速度及び制御指令用駆動トルクが指令された場合であっても、操作者が意図した旋回走行が行うことが可能となる作業車を提供する。
【解決手段】左右の走行装置を夫々独立に走行駆動する一対の電動モータ11R,11Lの作動を制御する制御手段23が、各電動モータ11R,11Lについて求めた目標速度と各電動モータ11R,11Lの回転速度とに基づいて求めた制御指令用速度及び制御指令用駆動トルクが出力制限領域にあるときは、走行状態指令手段にて指令されている車体の旋回状態に対応する速度差を維持し、且つ、定格領域に戻るように、制御指令用速度及び制御指令用駆動トルクを補正する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
移動装置
【課題】搭乗者が左操作または右操作を加えると移動方向を変える移動装置の操作を簡単化したい。搭乗者が右左折を意図して操作したのか、車線変更を意図して操作したのかが判別できないと操作を簡単化できない。
【解決手段】移動装置の位置を特定する位置特定装置と、移動装置が移動可能な経路網に存在する分岐点群の位置情報を示す分岐点群の位置情報DBと、角速度指示値の計算装置を備えている。計算装置は、操作部が左操作された時の移動装置の位置から次の分岐点までの距離が所定値以下であれば当該分岐点で左折する角速度指示値を計算し、操作部が左操作された時の上記距離が所定値以上であれば左側へ車線変更する角速度指示値を計算し、操作部が右操作された時の上記距離が所定値以下であれば当該分岐点で右折する角速度指示値を計算し、操作部が右操作された時の上記距離が所定値以上であれば右側へ車線変更する角速度指示値を計算する。
(もっと読む)
立位乗車移動体の運転操作補助装置、立位乗車移動体の運転操作補助方法、及び、立位乗車移動体の運転操作補助用プログラム
【課題】 路面状況に変化があっても姿勢変化による運転操作が意図通りにできる立位乗車移動体の運転操作補助装置及び方法、並びに、運転操作補助用プログラムを提供する。
【解決手段】 背もたれ面圧力センサ121asと座面圧力センサ121bsとで検出される圧力値を用いて、傾き取得部140で立位乗車移動体100の傾き(平地/上り坂/下り坂)を検出し、操作入力部選択部150で移動体100の傾きにより生じる運転者91の自然な姿勢変化に応じて、より操作しやすい操作入力部として背もたれ面操作入力部121aと座面操作入力部121bとを切替える。
(もっと読む)
作業車
【課題】左右の走行車輪を一対の電動モータにて夫々独立に走行駆動し且つ夫々独立で左右の走行車輪に対する変速操作を行うようにしながらも、走行安定性を向上することが可能な作業車を提供する。
【解決手段】直進並びに旋回走行を現出可能な状態で左右の走行車輪2,2を夫々独立に走行駆動する一対の電動モータ11R,11Lと、夫々独立で左右の走行車輪2,2に対する変速操作を行う左右一対の変速操作具12R,12Lと、作動を制御する制御手段23とが備えられ、制御手段23が、変速操作具12R,12Lの操作位置が左右で異なるときは、各電動モータ11R,11Lの夫々に対する目標速度を、それらの速度差が各変速操作具12R,12Lの操作位置の差に対応する速度差よりも設定量だけ小さくなる状態で設定して各電動モータ11R,11Lの作動を制御する。
(もっと読む)
乗用作業車
【課題】車体の走行に伴って車体周囲の作業対象物に対する作業を行う電動式作業デバイスの電力消費を抑制する制御を実装された乗用作業車の提供。
【解決手段】乗用作業車は、運転座席を備えた車体と、当該車体を支持する駆動車輪ユニットと、作業デバイスを有する作業ユニットを駆動するための作業用電動機と、作業用電動機を定常モード又は当該定常モードより消費電力が少ない省電力モードで動作制御する電動機制御部と、作業用電動機の負荷を評価する作業負荷評価部とを備えている。作業負荷評価部によって評価された作業用電動機の負荷がしきい値より低い低負荷である場合に、電動機制御部は作業用電動機を省電力モードで動作させる。
(もっと読む)
作業車両
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
1 - 10 / 99
[ Back to top ]