
国際特許分類[B62D15/00]の内容
国際特許分類[B62D15/00]の下位に属する分類
操向位置表示装置 (25)
国際特許分類[B62D15/00]に分類される特許
1 - 10 / 47
球形車輪駆動システム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
全方向移動車両
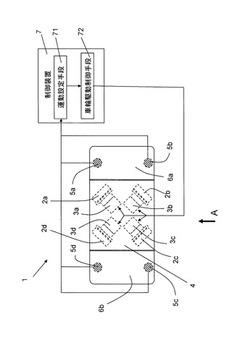
【課題】全方向への移動走行と自転運動の組合せで構成される多種類の運動を、荷重センサの出力に基づき操作できる全方向移動車両を提供する。
【解決手段】荷重センサ5a、5b、5c、5dの方向と出力値により決まるベクトルを指令値として送出する操作手段と、全方向移動車両1の運動を設定する運動設定手段71と、運動設定手段71により設定された運動をさせるべくオムニローラ2a、2b、2c,2dに動作指令を出力する車輪駆動制御手段72とを備える。運動設定手段71が、指令値の総計である総計指令値により運動方向と運動速度の少なくも1方を設定し、複数の所定の指令値の合計である所定合計指令値を用いて運動の種類を設定する。
(もっと読む)
全方向移動ロボット

【課題】駆動力を効率的に球状車輪に伝達することができる全方向移動ロボットを提供する。
【解決手段】1又は2以上の球状車輪2と、前記球状車輪2の中心で交差するピッチ軸、ロール軸、及びヨー軸周りに回転自在に前記球状車輪2を支持し、直列に連結されたピッチリンク10、ロールリンク11、及びヨーリンク12と、前記各リンクを回転駆動させるアクチュエータ5と、前記アクチュエータ5を動作制御する制御部6と、前記ヨーリンク12に固定された搭乗部4と、前記搭乗部4の姿勢を検出する変化量検出センサ7とを備えることを特徴とする。
(もっと読む)
全方向移動体操作システムおよび全方向移動体操作方法
【課題】操作装置によって全方向移動体を簡易に遠隔で操作する。
【解決手段】全方向移動体500の車両目標速度計算部504は、操作対象である全方向移動体500の存在する車両位置Cを全方向移動体を操作する基準位置を示す操作体基準位置との相対的な位置関係により表わし、かつ、操作装置400に与えられる操作に応じた操作量を、操作体の位置を示す操作体基準位置Sを原点とする座標系において表わされる目標位置Oにより表わすことにより、この車両位置Cから目標位置Oまでの目標移動速度ベクトルを決定する。車輪速度指令演算部505は、この目標移動速度ベクトルに従って基体を駆動させるよう、車輪駆動部506に指示する。
(もっと読む)
全方向車輪および移動装置
【課題】前後左右に障害物があっても乗り越えることができる全方向車輪を提供することを目的とする。
【解決手段】本発明の全方向車輪10は、外周に自由に回転する複数の小径輪12を設けた全方向に動く主輪13と、主輪13の側部に設置した主輪13の最大外径より小さい最大外径のガイド部14と、を備え、ガイド部14は、主輪13より離れるに従い外径が小さくなる形状とした構成である。このような構成により、ガイド部14が先頭になる方向へ動いている途中に障害物があったとしても、ガイド部14の外周縁15は傾斜しているので、障害物にぶつかると外周縁15の傾斜に沿って障害物を乗り越えることができる。
(もっと読む)
移動装置
【課題】階段を昇降することも、平面上の全方向に移動することも可能な移動装置を提供する。
【解決手段】基体1に取付けられた車輪支持ユニット2を鉛直軸回りに回転させて、複数の大車輪7の水平な大車輪回転軸11を平面視で直交2軸方向に設定し、大車輪回転軸11に付与された駆動力を小車輪14の小車輪回転軸15に伝達すれば、小車輪回転軸15が移動方向と直交する小車輪14は小車輪回転軸15回りに回転され、小車輪回転軸15が移動方向と直交しない小車輪14ではフリーローラ16が自在に回転して平面上の全方向への移動が可能となり、複数の大車輪回転軸11を平面視で全て平行になるように設定し、階段の段差に小車輪14が当接してその回転が規制されると、大車輪7(大車輪本体12)が駆動力で回転し、当該大車輪7に取付けられている他の小車輪14が階段の段差を乗り越えて階段の昇降が可能となる。
(もっと読む)
全駆動型回転体付き車輪及び倒立制御型一輪車
【課題】全ての回転輪を個々に回転駆動して方向変換することができる、全駆動型回転体付き車輪を提供する。
【解決手段】ホイール16の周囲の回転体17a,17bに従動傘歯車21a,21bを備え、1つ置きの回転体17aの従動傘歯車21aを第1の回転分配伝達機構22を介して第1の回転体用モータ18で駆動し、残り1つ置きの回転体17aの従動傘歯車21bを第2の回転分配伝達機構23を介して第2の回転体用モータ19で駆動する。制御部13は、前進時、後進時及び斜め方向走行時に右又は左へ方向変換するときは、一の回転体の接地状態が終わりになると共に次の一の回転体の接地状態が始まる、2つの回転体17a,17bが接地状態にある時間帯に、接地状態が終わりになる回転体の周速と、接地状態が始まる回転体の周速とを相違させるように、第1、第2の回転体用モータ18,19の制御を行う。
(もっと読む)
摩擦式駆動装置及びそれを用いた倒立振子型移動体
【課題】迎え角を変更可能にして高い駆動効率を得ることが可能な一輪式の倒立振子型移動体の走行ユニットを提供する。
【解決手段】ドリブンローラ106に接触するドライブローラ58L、58Rを支持したローラブラケット52L、52Rの旋回軸54L、54R周りの配向位置を可変とし、ドライブローラ58L、58Rの迎え角を可変設定する。
(もっと読む)
全方向駆動車輪付き乗り物
【課題】
本発明は全方向駆動車輪付き乗り物を提供することを目的としている。
【解決手段】回転できる多数の駆動短軸1には接触軸端10により互いに接触するように配設され、これにはそれぞれ小径のキャスター2が固着され、該キャスター2は軸受金具3により回転自在に保持されると共に、カップリング4により動力伝達されるようになされ、該キャスター2のいくつかはねじれ伝動体6により動力分配プーリ7と連結されており、該動力分配プーリ7はプーリ連結軸8に回転自在に支承されており、軸受金具3を放射状に取り付けた側板80は上記プーリ軸連結体8により一体となされ、中央の太陽回転体9を駆動する横進モータ15と連結され、これにより方向転換出来るようになされた構成。
(もっと読む)
摩擦式駆動装置および摩擦式駆動装置を有する倒立振子型移動体
【課題】 ドリブンローラに接触可能なドライブローラの数を増加させる。
【解決手段】 摩擦式駆動装置40であって、電動モータ64L,64Rに回転させられる左右一対の円盤状のドライブディスク48L,48Rと、ドライブディスクの回転軸線に対して平行でも直交でもない回転面に沿って回転自在にドライブディスクの外周部に支持されたドライブローラ56L,56Rと、ドライブディスクの軸線方向において左右のドライブディスクの間に配置された環状体86と、環状体の環方向に複数個配置され、それぞれの配置位置において環状体の接線方向の軸線回りに回転可能に環状体に支持されたドリブンローラ92と、ドライブディスクとドライブローラとの間に設けられ、ドライブローラをドリブンローラ側に付勢する付勢部材53L,53Rとを有することを特徴とする。
(もっと読む)
1 - 10 / 47
[ Back to top ]