
国際特許分類[B65G43/10]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 制御,例.安全,警報,調整装置 (526) | 組み合わされて操作されるコンベヤのシーケンス制御 (17)
国際特許分類[B65G43/10]に分類される特許
11 - 17 / 17
アキュームレーションコンベヤ装置
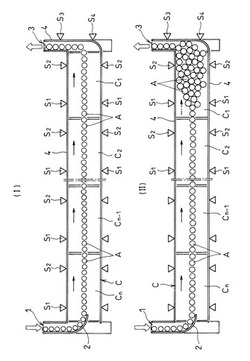
【課題】容器を先入れ、先出しすることができる小型のアキュームレーションコンベヤ装置を提供する。
【解決手段】容器Aを搬送する入口コンベヤ1に、一対のサイドガイド4を設けた幅広のアキュームレーションコンベヤCを接続し、その搬出端部に出口コンベヤ3を接続する。アキュームレーションコンベヤCを容器搬送方向に複数に分割し、その格分割コンベヤに容器の滞留を検出する入口センサおよび出口センサを設ける。処理装置の故障により、出口コンベヤ3上に容器Aが滞留し、出口コンベヤ3の供給端部上において停止する容器Aに後続の容器Aを当接させて容器Aを順次停止させ、最下流の分割コンベヤの搬出端部から順に容器Aを貯留させると共に、出口センサが貯留容器Aを検出した際に、その分割コンベヤを低速運転に切換え、入口センサが貯留容器Aを検出した際にその分割コンベヤを停止させて、最下流の分割コンベヤから順に容器Aを貯留させる。
(もっと読む)
搬送制御システム

【課題】安価、且つ、生産性高く、混在した状態で供給される複数種類の部材を処理する。
【解決手段】搬送制御システム1は、混在した状態で供給された複数種類の部材を到着順に取り出し可能な部材取出口2と、部材取出口2から取り出された部材を一時的に格納可能なバッファ部3と、部材取出口2又はバッファ部3から部材を取り出し、制御部6により設定された搬送先に部材を搬送する搬送装置4a,4bと、部材取出口2とバッファ部3内における部材の格納状況、及び搬送装置4a,4bの稼働状況に従って、部材取出口2とバッファ部3との間で部材の取り出し元、部材を使用する生産設備5a,5bとバッファ部3との間で部材の搬送先を決定し、搬送装置4a,4bによる部材の搬送処理を制御する制御部6とを備える。
(もっと読む)
板状材の支持装置
本発明は、板状材(12)内の少なくとも一カ所の加工工程に合わせ板状材(12)を受け入れる装置に関する。本装置は、加工工程期間中に少なくともX方向に移動可能の加工装置(14)と、それに垂直に配設した板状材(12)をY方向に前進させる機構と、第1の支持面(23)を備える第1の支持台(17)と、第2の支持面(23)を適合させた少なくとも一つの第2の支持台(18)とを備える。各支持台(17,18)は、別個に駆動されるコンベヤ(21)で取り囲んでいる。 (もっと読む)
ローラコンベヤの制動装置
【課題】 簡単な構成で確実にローラコンベヤを停止することができる制御装置の提供。
【解決手段】 モータ9を備えた少なくとも1つのモータローラを含むローラコンベヤのモータ9が物品を搬送方向に搬送するように回転している状態において、制御機器14がモータ9の駆動を停止する。モータ9の駆動停止後に、モータ9が搬送方向に回転しているか回転方向検出部22が判定する。モータ9が搬送方向に回転していると判定されたとき、搬送方向と反対方向に逆回転制御部26がモータ9を所定回転数だけまたは所定時間だけ回転させる。制動後に、モータ9が搬送方向に回転しているか否か判断し、搬送方向に回転しているとき、搬送方向への回転が中止されるまで、逆回転制御部26が繰り返し制動する。
(もっと読む)
コンベアユニットおよびゾーン制御式コンベアシステム
【課題】 センサを用いることなく、モータの有する発電機能を利用して被搬送物の搬入を検知し、しかも設計の容易なコンベアユニットを提供する。また、そのコンベアユニットを用いたゾーン制御式コンベアシステムを提供する。
【解決手段】 駆動ローラ5と、駆動ローラ5の駆動制御を行うコントローラ10を有するコンベアユニット2であって、駆動ローラ5は永久磁石と電機子コイル32a〜32cを内蔵したモータ30を駆動源とし、コントローラ10は電機子コイルの短絡、開放を繰り返す断続手段15と、電機子コイル32a〜32cで誘起される起電力に基づいて外力によるモータ回転を検知する回転検知手段17とを備える。モータ30の非駆動時に断続手段15による動作を継続しつつ待機し、回転検知手段17でモータ30の回転が検知されると、被搬送物が搬入されたと判別して在荷信号を出力するコンベアユニット2。
(もっと読む)
コンベヤ組立体
【課題】本発明は梱包機へ製品を搬送するスリップコンベヤに関する。
【解決手段】スリップコンベヤ組立体10である。組立体10は、縦列配置した6個のスリップコンベヤ11〜16を含む。各コンベヤ11〜16は、「U」形断面のトレイ18を含む。各トレイ18は、関連するトレイ18を水平方向に往復運動(振動)させて製品を組立体10沿いに前進させる駆動組立体19により動作させる。隣接するトレイ18は、製品を給送できる間隙が隣接トレイ間に存在するよう位置をかえることができる。
(もっと読む)
搬送順序決定方法および装置
【課題】生成する搬送順序の個体数に無関係に短時間で搬送順序を決定できる。
【解決手段】搬送手段と加工工程を有する製造装置内で搬送順序の決定を行う場合に、遺伝的アルゴリズムを実行する並列計算機に既知の搬送順序を初期解の1つとして入力する手段21と、遺伝的アルゴリズムを並列計算機上で実行するプログラムは、初期搬送順序を搬送順序保存部24へ記憶し、その初期搬送順序を入力として交叉演算部25で交叉演算を実行した結果を再び搬送順序保存部へ保存し、淘汰・集計実行部26により保存された搬送順序の集計・淘汰を行うもので、この際、複数の搬送順序による交叉演算と唯一の搬送順序の演算となる淘汰・集計演算を、並列計算機上で同時並列的に行って決定時間を短縮するものである。
(もっと読む)
11 - 17 / 17
[ Back to top ]