
国際特許分類[G01P3/56]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | 直線速度または角速度の測定;直線速度の差または角速度の差の測定 (1,568) | 電気的または磁気的手段の使用によって特徴づけられた装置 (1,301) | 2速度の比較用 (12)
国際特許分類[G01P3/56]の下位に属する分類
発生電流または電圧の振幅の測定または比較によるもの (1)
発生電流または電圧の周波数の測定または比較によるもの
国際特許分類[G01P3/56]に分類される特許
1 - 10 / 11
可変散布装置
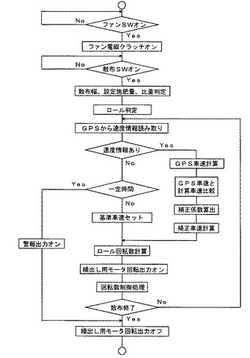
【課題】GPSからの速度情報が得られない場合にも常に車速を正確に知ることができる散布装置を提供すること。
【解決手段】GPSから位置情報と速度情報を受信するGPS受信機78によりGPSから速度情報を得て、車速センサ37から車輪4又は5の回転数を検出し、両方の速度情報に基づき肥料散布装置1による肥料散布量を算出し、GPS速度情報が得られないときには、車速センサ37で得られる車速に基づき車速を算出して肥料散布量を決める乗用管理機である。そして肥料などの散布途中でGPSからの車速データが得られなくなっても、車速データを補正しながらスリップの影響が少なく精度良い散布作業を継続できる。
(もっと読む)
摩擦伝動ベルトのスリップ速度測定方法

【課題】対象プーリとその前後のベルト速度を測定することで、対象プーリとベルトの相対速度とすることができる摩擦伝動ベルトのスリップ速度測定方法を提供する。
【解決手段】少なくとも一つのプーリに巻き掛けられた摩擦伝動ベルト15において、前記プーリと摩擦伝動ベルト15との相対速度を測定する方法であって、前記摩擦伝動ベルトの張り側でベルト速度を測定することでベルトのプーリ上でのスリップ速度を測定する摩擦伝動ベルトのスリップ速度測定方法。
(もっと読む)
車両の安全のためのセンサシステム、車両制御システム及び運転手情報システム
自己混合レーザセンサ10及び解析回路30を用いて、自動車のような車両の速度、及び該自動車の車輪20の回転速度を決定する、センサシステムが記載される。該車両の速度と車輪20の回転速度との間の逸脱が、車輪20の滑りを決定し、最終的には、摩擦、より具体的には、車輪20と該自動車が走行する路面との間の走行摩擦の係数を決定するために利用され得る。更に、制御回路50及び制御手段300、400により車輪20のテスト加速を始動し、走行の間の走行摩擦の係数を決定する、車両制御システムが記載される。該テスト加速は車輪20の短時間の滑りをもたらし、該滑りは該センサシステムにより検出される。  (もっと読む)
(もっと読む)
車両速度検出装置
【課題】
車両速度・位置検知において、車輪の粘着状態や路面状態に依存しない検出手段を提供する。
【解決手段】
回転センサと、車両の速度を車輪の回転によらず検出する非接触型速度センサと、車両の加速度を検出する加速度センサと、回転センサ,非接触型速度センサ,加速度センサの出力に基づき車輪の空転または滑走を検知する手段と、非接触型速度センサの出力に基づき路面状態を検知する手段と、粘着状態を検知する手段と、路面状態を検知する手段に基づき、車両速度および位置の演算方式を切り替える。
(もっと読む)
作業用車両において車輪のスリップを判定しデファレンシャル・ロックを係合させる方法
【課題】1つ以上の車軸の車輪スリップを精度高く検出し、その際に作業車両においてデファレンシャル・ロックを自動的に係合させる方法を提供する。
【解決手段】 作業用車両において車輪のスリップを判定する方法は、作業用車両の絶対対地速度を検知するステップと、少なくとも1つのドライブ・トレイン・コンポーネントを用いて、作業用車両の対地速度を計算するステップと、絶対対地速度を計算対地速度と比較するステップと、比較に基づいてスケーリング係数を生成するステップと、スケーリング係数を用いて、計算対地速度を調節するステップとを含む。
(もっと読む)
車輪の回転方向推定装置及び車輪の回転方向推定方法
【課題】駆動輪の回転方向を検出する回転検出手段の数を低減すること。
【解決手段】動力発生源が発生する動力を駆動軸に伝達し、駆動軸に取り付けられる第1車輪と第2車輪とを駆動する場合において、ステップS101では、動力発生源の回転状態に関する情報を取得し、ステップS102では、第1車輪の回転状態に関する情報を取得する。ステップS103では、回転状態に関する情報と、第1車輪の回転状態に関する情報と、動力発生源と駆動軸との間の変速比とに基づいて、第2車輪の回転状態に関する情報を算出する。ステップS104では、算出した第2車輪の回転状態に関する情報に基づいて、第2車輪の回転方向を推定する。
(もっと読む)
2点の移動量による角速度センサ及び角速度測定プログラム
【課題】機械的な動作を介さず、角速度を検出する。
【解決手段】2つの移動量検出センサ101と102は、剛体である車両100の異なる2点に固定され、各点における移動量を検出する。好適には後輪のそれぞれに設置され各々の車輪がどれだけ回転したかで検出するとよい。検出された移動量は、計算機103内の移動量算出機能104が積算する。タイマ機能105が任意に設定された一定間隔ごとに信号を送り移動量算出機能104が単位時間を計測できるようにする。積算された単位時間当たりの移動量は、角速度算出機能106に送られて、その移動量差(位相差)等から角速度算出機能106は角速度を算出する。
(もっと読む)
車輌の車体速度推定装置
【課題】線形領域に於いては車輪の制駆動状態に関係なく車輪のスリップ率に対する路面の摩擦係数の関係が一定であることに着目し、車輪の制駆動状態に関係なく車体速度を正確に推定する。
【解決手段】各車輪の制駆動力Fxi及び路面の摩擦係数μiが演算され(S20、S30)、車輪速度Vwiが互いにΔVo以上異なる車輪の組合せが一組以上存在すると判定されると共に(S60)、車輪速度Vwiが互いにΔVo以上異なる車輪の組合せに駆動状態の車輪及び制動状態の車輪が存在すると判定されると(S80)、車体速度Vvの演算に使用される二つの車輪速度Vwi及び路面の摩擦係数μiを決定するための二つの車輪が特定され(S90)、駆動状態の車輪の車輪速度Va及び路面の摩擦係数μaと制動状態の車輪の車輪速度Vb及び路面の摩擦係数μbに基づいて車体速度Vvが演算される(S100)。
(もっと読む)
車両の速度検出装置
【課題】 隊列走行時に各車両の基準となる速度を一致させることを可能とした車両の速度検出装置を提供する。
【解決手段】 レーダ装置1や前方カメラ2と画像処理装置21により、先行車との車間距離や相対速度情報を求め、これと通信装置40により受信した先行車の速度情報を基にして制御ECU5は、現在の自車速度の算出または校正を行う。こうして求めた車速情報を用いて隊列走行を行うことで、隊列走行グループ内での基準速度が一致し、整然とした走行を行うことが可能となる。
(もっと読む)
センサ装置
本発明は弾性構造体の特性を検出するシステム13、22、23、32、33、92、1202、1302、1402)に関し、その構造体は少なくとも1つのセンサ(111、112、14、211、212、311、312、911、1211、1311、1411)を備え、本システムは少なくとも1つの検出器(16、416、516、916、1316、1416)を備える。センサは、変形すると同時にその特性を表す信号に変換可能な信号を生成する変形可能な部材を備え、センサは受動送信機をさらに備え、検出器は前記特性を表す信号を受信する受信機をさらに備える。  (もっと読む)
(もっと読む)
1 - 10 / 11
[ Back to top ]