
国際特許分類[G01S3/80]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 方向性を有しない亜音波,音波,超音波,電磁波,または粒子放射の到来する方向を決定するための方位測定機 (828) | 超音波,音波,亜音波を用いるもの (223)
国際特許分類[G01S3/80]の下位に属する分類
細部 (8)
方向の決定または所定の方向からの偏差の決定のための方式 (201)
位相を調整するための,または時間遅れ誤差を補償するための手段をもつもの (3)
陰極線管上に与えられる指示をもつもの
不要波,例.妨害雑音,を消去する手段をもつもの (6)
国際特許分類[G01S3/80]に分類される特許
1 - 5 / 5
音声認識装置、ロボット、音声認識方法、プログラム及び記録媒体
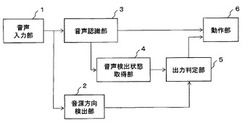
【課題】音声認識の精度を向上させる音声認識装置、ロボット、音声認識方法、プログラム及び記録媒体を提供する。
【解決手段】音声を入力する音声入力手段と、入力された音声の到来方向を検出し、音源方向検出結果を出力する音源方向検出手段と、入力された音声に発話区間を検出し、発話区間に対し認識処理を行い、音声認識結果を出力する音声認識手段と、音声認識手段が音声検出中であるか否かを出力する音声検出状態取得手段と、音声検出中でない場合は音源方向検出手段から出力された音源方向検出結果を出力し、音声検出中である場合は音声検出中でなくなるまで音源方向検出結果の出力を抑制する出力判定手段と、出力判定手段から出力された音源方向検出結果、若しくは音声認識手段から出力された音声認識結果の少なくともいずれかに従って動作を行う動作手段と、を備えることを特徴とする。
(もっと読む)
超音波送受信装置

【課題】周辺環境で発生した超音波と超音波発振装置で発振された超音波とを区別できるようにする。
【解決手段】超音波受信装置11を構成する制御回路26は、信号判定回路25から得られる受信情報の入力に応じて、超音波を所定の時間間隔でn回連続して受信したn回連続受信時点t(n)の時間情報をメモリ27に一時的に記憶させる。判定制御手段28は、超音波の受信に基づいて、n回連続受信時点t(n)より一定周期T前、又は補正周期(T±α)前の超音波のn回連続受信の有無を判断し、前記判断が受信有りの場合には、前記受信が超音波発振装置13の超音波発振による受信であるとの判定を行ない、前記判断が受信無しの場合には、前記受信が超音波発振装置13の超音波発振による受信ではないとの判定を行なう。
(もっと読む)
目標運動解析装置、目標運動解析方法プログラムおよび目標運動解析方法
【課題】目標体の運動モデルを等速直進運動とすると、目標体が変針変速することにより、変針変速前後の目標の運動を正しく解析できないという問題があった。
【解決手段】本発明の目標運動解析方法は、目標体の変針変速を検出した上で、時系列観測データを用いて変針変速時刻を推定し、さらに時系列観測データを用いて、基準時刻における目標体位置座標および、推定した変針変速時刻前後の等速直進区間毎の目標体の針路、速力を推定パラメータとする非線形最適化問題を解くことである。
(もっと読む)
目標運動解析プログラム、目標運動解析装置および目標運動解析方法
【課題】観測体の変針時の速力センサ誤差やジャイロセンサの誤差に起因する観測方位のバイアス誤差が存在する。
【解決手段】目標体から放射される音波の到来方位を音響センサにより時系列的に観測した時系列観測方位データを用いて、観測体の、観測時刻、目標体に対する観測方位、位置座標東西成分、位置座標南北成分、速力東西成分、および速力南北成分を入力し、時系列観測方位データに対してバイアス誤差成分に関するインデックスを設定し、これらに基づいて、バイアス誤差成分および目標体の運動ベクトルを推定する。
(もっと読む)
分離信号を生成するシステムおよび方法
本発明は、ブラインド信号源分離に関するものである。より詳細には、本発明は、周波数領域プロセスを使ったブラインド信号源分離に関するものである。 (もっと読む)
1 - 5 / 5
[ Back to top ]