
国際特許分類[G06N3/04]の内容
物理学 (1,541,580) | 計算;計数 (381,677) | 特定の計算モデルに基づくコンピュータ・システム (1,616) | 生物学的モデルに基づくコンピュータ・システム (1,008) | ニューラル・ネットワーク・モデルを用いるもの (314) | アーキテクチャ,例.網構造 (75)
国際特許分類[G06N3/04]に分類される特許
41 - 50 / 75
データ処理装置、データ処理方法、及びプログラム

【課題】多数のダイナミクスを効率的に学習する。
【解決手段】ダイナミクス記憶ネットワークは、複数のノードによって構成され、ダイナミクスを1つのノードに保持する。媒介信号供給部14は、ダイナミクス記憶ネットワーク処理部13と15それぞれのダイナミクス記憶ネットワークである下位階層ネットワークと上位階層ネットワークとの間を媒介するための媒介信号を、ダイナミクス記憶ネットワーク処理部13と15に供給する。ダイナミクス記憶ネットワーク処理部13と15それぞれの学習部21と31は、媒介信号を含む時系列データに基づき、下位階層ネットワーク及び上位階層ネットワークの各ダイナミクスを自己組織的に更新する。本発明は、例えば、自律型ロボット等に適用できる。
(もっと読む)
ガス排出量の経験的アンサンブルに基づく仮想センシングのためのシステム及び方法
本発明では、2つ以上の経験的モデル(NN1、NN2、...、NNn)を備えた燃焼プロセス(CP)から生じるガスの量(G)の推定のための経験的アンサンブルに基づく仮想センサシステム(VS)を提供する。ガスの量(G)は各経験的モデル(NN1、NN2、...、NNn)の中で推定され、結合関数(f)は、個々の経験的モデル(y1、y2、...、ym)の1つずつからのガスの推定値より正確であるガスの量(G)の結合推定値を提供するため、経験的モデル(NN1、NN2、...、NNn)からの結果を結合する。仮想センサシステム(VS)の全性能は、経験的モデル(y1、y2、...、ym)の個数を増加することにより高められる。 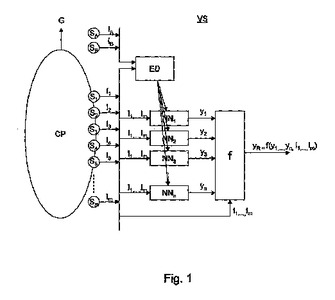 (もっと読む)
(もっと読む)
データ処理装置、データ処理方法、及びプログラム

【課題】誤差を適切に考慮した処理を行う。
【解決手段】本体学習モジュール101は、データDを学習する。誤差学習モジュール102は、データDと、本体学習モジュール101がデータDを再構成した再構成データDRとの誤差ΔDを学習する。また、本体学習モジュール101は、データDの入力があると、そのデータDを再構成して、再構成データDRを出力し、誤差学習モジュール102は、データDと、再構成データDRとの誤差データΔDを再構成して、再構成誤差データΔDRを出力する。そして、学習モジュール100は、再構成データDRと、再構成誤差データΔDRをとを加算して出力する。本発明は、例えば、ロボット等に適用できる。
(もっと読む)
多次元時系列データの特徴量抽出装置
【課題】多次元の時系列データを処理する砂時計型ニューラルネットワークに過去の履歴を反映させ、入出力関係が非線形に変化するような特徴量を抽出可能とする。
【解決手段】特徴量抽出部2を、砂時計型ニューラルネットワーク20と、この砂時計型ニューラルネットワーク20の出力層から入力層へのフィードバック構造を形成するフィードバック器30とにより構成する。フィードバック器30は、Z変換器31、ローパスフィルタ32、ハイパスフィルタ33、バンドパスフィルタ34、ヒステリシス発生器35を備え、出力層L5からの出力を、時間領域、周波数領域、空間領域でデータ処理して入力層L1にフィードバックすることで、過去の履歴の反映、出力周波数の帯域調整、状態に応じた入出力特性の調整を行う。これにより、入出力関係が非線形に変化するような特徴量も抽出可能となる。
(もっと読む)
演算処理装置及びその制御方法
【課題】階層的な演算処理回路を少ない作業メモリで実現する。
【解決手段】入力データに演算を施して演算結果を生成する複数の処理ノードが階層的に接続されたネットワークの演算処理を実行する演算処理装置は、複数の処理ノードの各々にメモリの部分領域を割り当て、処理ノードによって実行された演算処理の演算結果を当該処理ノードに割り当てられた部分領域の格納可能な領域に格納し、当該処理ノードの後段に接続された全ての処理ノードによる参照が完了した演算結果が格納されている領域を格納可能な領域に設定する。ネットワークを構成する処理ノードのうち、演算処理を実行するべく指定された処理ノードの演算を実行するか否かを、指定された処理ノードとその前段に接続された処理ノードに割り当てられたメモリの部分領域における演算結果の格納状態に基づいて判断する。
(もっと読む)
学習制御装置および方法、並びにプログラム
【課題】時系列ベクトルのパターンが変化した場合でも、確実に元のパターンを予測できるようにする。
【解決手段】モジュールを有する時系列予測演算部12は、入力部11より入力された時系列ベクトルから予測を行う。予測誤差演算部13はモジュールの予測誤差を演算する。可塑性パラメータ演算部17は、モジュールの学習の可塑性を表す可塑性パラメータを演算する。学習部19は、モジュールのうち、可塑性パラメータが学習モジュールであることを表すモジュールを学習させ、可塑性パラメータが生成モジュールであることを表すモジュールの学習を禁止する。
(もっと読む)
ホップフィールドネットワーク
【課題】仮想磁場漸弱法による磁場パラメータ又はニューロン間の結合荷重係数を用いてより確実に最適解を求めるホップフィールドネットワークを提供する。
【解決手段】ニューロンの出力を求める場合に使用するニューロンの出力の算出式に磁場パラメータが含まれ、当該磁場パラメータは、磁場パラメータが初期値を負とし、時刻の経過により0、正、0となるように磁場パラメータ付与手段により求められるので、後説する実施形態の実験結果に示すようにより確実に最適解を求めることができる。また、ニューロン間の結合荷重係数を変化させることでネットワークのエネルギー状態を変化させて確実に最適解を求めることができる。
(もっと読む)
技術システムをコンピュータ支援により制御および/または調整するための方法
本発明は、技術システムのコンピュータ支援による制御および/または調整に関する。本方法においては教科学習方法および人工ニューラルネットワークが使用される。有利な実施形態においては、アーキテクチャが全体で1つの最適性判定基準を満たすように並列なフィードフォワードネットワークが相互に結合される。ネットワークは観察される報酬を期待される報酬に近似させる。このようにして実際に行われる観察が最適に利用され、品質関数が決定される。内的にネットワークから取得される品質関数は所定の制御問題に関して最適な動作選択規則を提供する。本発明を任意の制御システムに使用することができる。有利な適用分野はタービン、殊にガスタービンの制御ないし調整である。  (もっと読む)
(もっと読む)
モデル導出方法、認識システム、情報処理装置、設計装置、設計方法、及び、プログラム
【課題】従来よりも好適な認識システムの計算モデルを導出できるようにする。
【解決手段】本発明が適用されたモデル導出装置では、与えられたS個の学習データD(s)={X(s),y(s)}(但し、s=1,…,Sである。)に基づき、教師信号をy(s)として、ニューラルネットワークのパラメータ(結合係数)の解を求める(S210)。そして、学習データD(s)毎に、このニューラルネットワークに対してサンプルX(s)を入力し、ニューラルネットワークの出力層より1層手前の中間層の出力値Z={z1,…,zN2}を求め、出力値ZをサンプルU(s)として新たな学習データDv(s)={U(s),y(s)}を生成する(S220)。そして、この学習データDv(s)を用いて、非線形サポートベクタマシンを設計し(S240)、ニューラルネットワーク及び非線形サポートベクタマシンを組み合わせてなる計算モデルを導出する。
(もっと読む)
制御装置、制御システム、ならびに、プログラム
【課題】神経細胞をシミュレートするニューロンに生存原理を導入し、基本構造を組み合わせることで種々の制御対象を容易に制御できるようにする制御装置等を提供する。
【解決手段】制御装置501において、バースティングモデルに基づくニューロン部101を複数並べた入力層503、学習層504、出力層505は、それぞれ、重みα[i,j]、重みβ[j,k]で連結され、更新部507は、入力層503と出力層505の発火や出力の対応関係等からヘッブ則に基づいて重みα[i,j]を更新して学習し、入力層503には制御入力部502を介して目標値や実際の測定値等の制御入力が与えられ、制御出力部508は、出力層505の発火の個数に比例する量を制御対象に印加する制御出力として出力し、入力層503、学習層504、出力層505の各層内で、発火の閾値に対応する変数の初期値をそれぞれのニューロン部101で異なるものとする。
(もっと読む)
41 - 50 / 75
[ Back to top ]