
国際特許分類[H02P6/18]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 回転子の位置に依存する電子整流子を有する同期電動機または他の電動機の制御装置;それに用いる電子整流子 (4,020) | 電子整流子 (1,576) | 位置検知用回路装置 (1,558) | 別個の位置検知素子を有しないもの,例.線輪の逆起電力を用いるもの (820)
国際特許分類[H02P6/18]に分類される特許
1 - 10 / 820
モータ制御装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
電気角推定装置、モータシステム、電気角推定方法及びプログラム
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
モータ制御装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
車両用操舵装置
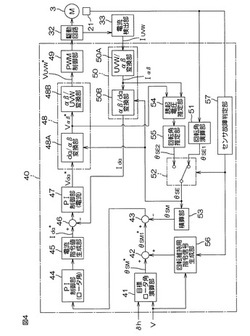
【課題】転舵用モータの回転角を検出するための回転角センサが故障した場合でも、転舵用モータの回転角を検出するための他の回転角センサを用いることなく、操舵制御を行なえるようになる車両用操舵装置を提供する。
【解決手段】センサ故障判定部57は、回転角センサ21の故障を検出すると、第1制御モードから、第2制御モードに、制御モードを切り換える。第2制御モード時には、回転角推定部55によって推定される第2のロータ角(電気角)θSE2に基づいて転舵用モータ3の実ロータ角(機械角)θSMが演算される。そして、この実ロータ角θSMが、目標ロータ角演算部41によって演算される目標ロータ角θSM*に回転角維持用指令信号が重畳された後の目標ロータ角θSM1*に収束するようにフィードバック制御が行なわれる。
(もっと読む)
車両用ブラシレスモータの駆動装置

【課題】 より簡素な構成で製造コストを削減しながら、回転子の適切な位置検出によってブラシレスモータを駆動することができる車両に搭載された車両用ブラシレスモータの駆動装置を提供する。
【解決手段】 複数の固定子巻線UI、VI、WIへの電圧の供給をオン/オフするための電流調整PWM信号を生成する駆動信号生成手段54と、生成された電流調整PWM信号に応じて、各固定子巻線に電圧を供給する電圧供給手段20と、電流調整PWM信号から所定の期間TMREF1だけ位相をずらした内部PWM信号を生成する位置検出用信号生成手段55と、生成された内部PWM信号および検出された各固定子巻線に供給される電圧に応じて、回転子と各固定子巻線との相対的な位置を検出する位置検出手段55と、を備え、駆動信号生成手段54は、検出された回転子の位置に応じて、電流調整PWM信号を生成する。
(もっと読む)
コンベヤ駆動装置
【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備え、該永久磁石同期モータ3の各相の巻線に発生する誘起電圧に対して進み位相となるよう通電を行うことにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
インバータ制御装置と電動圧縮機および電気機器
【課題】誘起電圧波形のゼロクロス点の検出が不可能、すなわちロータの相対位置が認識できないような運転状態となった場合に、ブラシレスDCモータの運転を継続することが不可能となって脱調停止するという課題を有していた。
【解決手段】ブラシレスDCモータ203の目標回転数に応じて、所定の周波数で通電角180度未満の波形を出力する同期転流により動作するとともに、インバータ回路部204の出力電圧に対するロータ誘起電圧位相を所定の位相に保つために、同期転流による動作においてもロータ位相の変化状態に応じて出力電圧を変化させ、過負荷時にオーバーラップ通電をする際、位相の変化に対して脱調しにくい低回転時よりオーバーラップさせることにより、モータの運転状態を追従させるようにした。
(もっと読む)
回転電機制御装置
【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器
【課題】非常に負荷が軽く不安定なシステム状態もしくは非常に負荷が重い状態であっても、安定駆動できるとしたモータ駆動装置を提供すること。
【解決手段】端子電圧取得部5が取得した端子電圧の発生タイミングによって通電角を120度以上180度未満の間で決定する通電角決定部10と、周波数設定部9で設定した周波数と通電角決定部10で決定した通電角で第2の波形信号を出力する第2波形発生部12と、端子電圧取得部5が取得した端子電圧が所定の状態に近づくよう第2の波形信号を補正した補正波形信号を出力するので、広い負荷範囲で電流位相が安定し、安定したモータ駆動装置の提供が可能となる。
(もっと読む)
モータ駆動装置およびにこれを用いた電気機器
【課題】安定制御可能な範囲を拡張し、多様なモータに対応したモータ駆動装置を提供すること。
【解決手段】ブラシレスDCモータ4に流れる電流を取得する電流検出部7と、電流検出部7で検出された電流値がブラシレスDCモータ4の駆動している速度とは異なる周期での変化を検出し結果によって通電角を120度以上180度未満の間で変更する通電角変更部8と、電流検出部7が取得した電流の位相と所定の関係を有する波形で、かつ、周波数設定部9で設定した周波数で通電角変更部8によって決定された通電角の波形である第2の波形信号を出力することにより、電流状態に応じて安定制御可能な通電角へと変更を行うこととなり、電流と印可電圧の位相差の補正による制御可能な範囲を拡張し、更に多様なモータやモータ出力に対応するモータ駆動装置を提供可能となる。
(もっと読む)
1 - 10 / 820
[ Back to top ]