
フーリエ反復位相回復法
【課題】ノイズなどを含む不完全な回折パターンに対しても、オリジナルに近い実像を再構成することができる、フーリエ反復位相回復法を提供する。
【解決手段】フーリエ反復位相回復法の基本アルゴリズムによって得られる複数の計算結果をもとに、フーリエ空間の振幅に対して平均操作を行い、得られた振幅平均を新たな振幅とし、この新たな振幅をもとにして前記基本アルゴリズムを適用し、位相を求める。
【解決手段】フーリエ反復位相回復法の基本アルゴリズムによって得られる複数の計算結果をもとに、フーリエ空間の振幅に対して平均操作を行い、得られた振幅平均を新たな振幅とし、この新たな振幅をもとにして前記基本アルゴリズムを適用し、位相を求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、フーリエ反復位相回復法、特に、その平均操作に関する方法(平均化処理方法)に関する。
【背景技術】
【0002】
振幅のみが既知で、位相が得られない状況において、フーリエ変換を繰り返し行うことによって位相を求める方法は、フーリエ反復位相回復法として知られている。フーリエ反復位相回復法の基本は、非特許文献1、2によって与えられる。
【0003】
この手法は、現在、多くの分野で応用されている。例えば、X線、光、または電子線を利用した回折イメージングと呼ばれる分野がその1つである。また、この手法は、例えば、CT(Computer Tomography)の分野でも応用されている(非特許文献3参照)。
【0004】
ここでは、以下、説明を容易にするために、回折イメージングを例にとって説明するが、回折イメージングに限定されないことは当然である。
【0005】
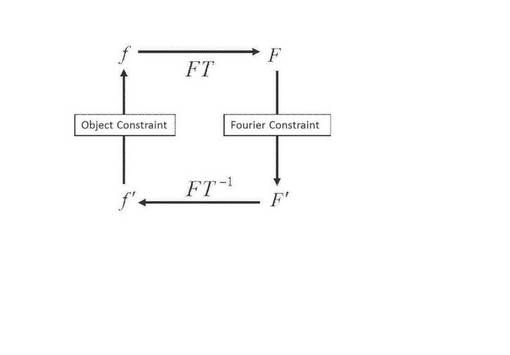
フーリエ反復位相回復法とは、フーリエ変換によって関係付けられた2つの関数の間で、位相を求めるための方法を指す。図1は、フーリエ反復位相回復法の基本アルゴリズムを示す図である。図2において、物体(厳密には、入射波と物体とが相互作用した物体波)をfとし、物体fに対してフーリエ変換FTを施したもの(厳密には、検出面での回折波)をFとする。fとFは複素関数(複素数を変数とし、複素数に値をもつ関数)とし、対応する振幅および位相を、それぞれ、|f|と|F|、および、φとΦとする。一般的に、回折実験によって得られる物理量は、回折強度、即ち振幅|F|のみであり、位相Φは得られない。もし何らかの方法で位相Φが求められれば、Fに逆フーリエ変換FT−1を施すことで物体fが得られる。このために、非特許文献1、2では、位相を求めるための「フーリエ反復位相回復法(Fourier Iterative Phase Retrieval)」を提案した。フーリエ反復位相回復法は、図1に示すように、実空間と逆空間(周波数空間)の両方でそれぞれの拘束条件、つまり、「オブジェクト拘束条件(Object Constraint)」と、「フーリエ拘束条件(Fourier Constraint)」(回折実験によって得られた振幅|F|)とを課しながら、フーリエ変換と逆フーリエ変換を逐次的に交互に繰り返すことによって位相を得る手法である。この手法によって物体のイメージが得られることは、非特許文献4で実験的に実証された。なお、オブジェクト拘束条件の与え方は、具体的なアルゴリズムで異なる。
【0006】
図2は、回折イメージングのシミュレーションの一例を示す図である。ここでは、フーリエ拘束条件として、左側の回折パターンを用い、オブジェクト拘束条件として、実関数・非負性およびサポート(物体を取り囲む領域)の外をゼロとし、5000回まではHIO(Hybrid Input-Output)と呼ばれる更新アルゴリズムを適用し、それ以降10000回まではER(Error Reduction)と呼ばれる更新アルゴリズムを適用して、右側の実像が得られた。これはシミュレーションであるため、実像をもとに回折パターンを作成したが、オリジナルの実像が忠実に再構成されている。
【0007】
回折イメージングとは、図2に示すように、実験によって計測された回折パターンをもとに、計算機による数値計算によって実像を得るイメージング手法であり、物理的なレンズの機能をデジタル計算によって実現する「デジタルレンズ」と言える。
【先行技術文献】
【非特許文献】
【0008】
【非特許文献1】R. W. Gerchberg, Nature, 240, 404-406, 1972
【非特許文献2】J. R. Fienup, Appl. Opt., 21(15), 2758-2769, 1982
【非特許文献3】R. Rangayyan, A. P. Dhawan, and R. Gordon: Algorithms for limited-view computed tomography: an annotated bibliography and a challenge, APPLIED OPTICS, 24(23), 1985
【非特許文献4】J. Miao, P. Charalambous, J. Kirz and D. Sayre: Nature, 400, 342-344, 1999
【非特許文献5】H. Shioya, Y. Maehara, and K. Gohara: Spherical shell structure of distribution of images reconstructed by diffractive imaging, J. Opt. Soc. Am. A, 27(5), pp.1214-1218, 2010
【発明の概要】
【発明が解決しようとする課題】
【0009】
実像をフーリエ変換した理想的な回折パターンが得られれば、図2に示すように、理想的な実像を再構成することができる。しかし、実験によって得られる回折パターンにはいろいろなノイズが含まれる。特に、X線または電子の量子性に起因する量子ノイズは、原理的に取り除くことができない。すなわち、現実には、理想的な回折パターンを得ることは不可能であり、不完全な回折パターンを用いることになる。このような状況では、オブジェクト拘束条件と不完全な回折パターンとのミスマッチが生じ、収束先が一意に定まらず、初期条件または繰り返し回数によって異なる実像が図1のアルゴリズムによって得られる。すなわち、実験によって得られた同一の回折パターンに対して、複数の異なる実像が得られることになる。この問題の対処法としては、従来、複数の異なる実像を足し合せて平均化したものを最終的な結果とすることが一般的に行われている(非特許文献5参照)。
【0010】
計算機によって得られる1つ1つのイメージは、得られるべき理想的なイメージに対して、平行移動や反転などが生じたものであり、複数の物体のイメージの平均化を行うためには、これらを補正する必要がある。しかし、平均化処理によってイメージにボケが生じ、これは分解能を劣化させる原因となる。
【0011】
図1に示すフーリエ反復位相回復法で説明したように、この方法では、オブジェクト拘束条件と呼ばれる「事前情報(Prior)」が重要な役割を果たしている。事前情報の1つに、物体を取り囲む領域(サポート)がある。サポートには、実験精度内での誤差が生じる。よく知られているように、誤差がゼロの場合を「タイトサポート」、誤差がある場合を「ルーズサポート」とそれぞれ呼んで、両者を区別している。図2は、タイトサポートの場合のシミュレーション結果である。現実の実験では、誤差がゼロの場合はあり得ないため、ルーズサポートが事前情報(Prior)の1つとしてアルゴリズムに組み込まれることになる。
【0012】
以下、ルーズサポートで、回折パターンに量子ノイズが重畳している場合のシミュレーションを示す。
【0013】
図3は、シミュレーションに用いた物体およびルーズサポートを示す図である。図3に示すように、物体は、3種類の細長いスリット27本を不規則に並べたものとする(27×15ピクセル)。各スリットのサイズは、幅1ピクセル、長さ15ピクセルである。また、スリットの種類は、値が1(白)、0.75(グレー)、0(黒)の3種類である。サポートは、物体の周辺(上下左右)にそれぞれ5ピクセルの幅を持たせ、横37ピクセル、縦25ピクセルとする(37×25ピクセル)。すなわち、サポートは、物体よりも広い領域のルーズサポートとする。
【0014】
シミュレーションでは、ルーズサポートを中心に配置し、実像の全領域を128×128ピクセルとした。そして、実像を配置してフーリエ変換を施して得られた振幅の2乗に、量子ノイズを重畳し、これを、観測によって得られる回折パターンとした。そして、サポート内が一様乱数によって生成されたランダムな値をとるイメージを1000個作成した。そして、図1に示すフーリエ反復位相回復法を適用して、これら1000個のイメージを初期値としてそれぞれ位相回復を行い、1000個の回復イメージを得た。図4は、初期値が異なる回復イメージの例を示す図である。図4の破線内には、3つの例を示した。ここでは、回復イメージの一部、具体的には、サポート内(37×25ピクセル)のみ示している。図4の右端には、比較のために、図3と同じ元の物体およびサポートを示した。これが、目標のイメージである。
【0015】
図4に示すように、目標のイメージ(右端)と回復イメージ(破線内)とを比較すると、回復イメージは、3つとも、サポート内において、左右上下に物体の位置がずれていること、さらに、左から2番目の回復イメージは反転(180度回転)もしていることがわかる。また、各回復イメージは1本1本のスリットのコントラストが目標のイメージとは大きく異なっていること、3つの回復イメージはどれも互いに異なるコントラストであることがわかる。
【0016】
なお、回折パターンは、総カウント数を106個とし、量子ノイズは、ρを期待値とするポアソン分布P(n;ρ)で計算した。このポアソン分布P(n;ρ)は、式(1)で与えられる。ここで、nは、各点にノイズがある場合の強度であり、期待値ρは、各点にノイズがない場合の強度である。また、オブジェクト拘束条件として、実関数・非負性およびサポートの外をゼロとし、5000回まではHIOの更新アルゴリズムを適用し、それ以降10000回まではERの更新アルゴリズムを適用した。
【0017】
【数1】

【0018】
図5は、従来の平均化処理(実空間での平均操作)の結果の一例を示す図である。図5の左側上端には、1000個の初期画像から得られた物体の回復イメージ(実像)に対して、サポート内での上下左右に位置がシフトすることによるズレ、および反転した像が得られることを考慮して、1000個の実像を足し合わせ平均化して得られたイメージを示している。図5の左側下端には、左側上端に矢印で示す水平ラインにおける強度プロファイルを示している。図5の右側上端に示す目標のイメージと比較すると、物体の対応関係は見られるものの、両者に大きな違いがあることがわかる。また、図5の右側下端に示す目標物体の強度プロファイルと比較すると、大きな構造の対応関係はあるものの、細かい構造の対応関係が壊れており、明瞭な違いがあることがよくわかる。これは、従来の平均化処理では、図4に示すようなそれぞれ異なるイメージを足し合わせて平均化しているために、ボケが生じた結果である。これは、実像の平均化において一般的に見られる現象である。
【0019】
本発明の目的は、実像の平均化処理によって生ずるボケを解消することができるフーリエ反復位相回復法を提供することである。
【課題を解決するための手段】
【0020】
本発明のフーリエ反復位相回復法は、フーリエ反復位相回復法の基本アルゴリズムによって得られる複数の計算結果をもとに、フーリエ空間の振幅に対して平均操作を行い、得られた振幅平均を新たな振幅とし、この新たな振幅をもとにして前記基本アルゴリズムを適用し、位相を求める。
【発明の効果】
【0021】
本発明によれば、フーリエ反復位相回復法において、実像の平均化処理によって生ずるボケを解消することができ、ノイズなどを含む不完全な回折パターンに対しても、オリジナルの実像に近いイメージを再構成することができる。
【図面の簡単な説明】
【0022】
【図1】フーリエ反復位相回復法の基本アルゴリズムを示す図
【図2】回折イメージングのシミュレーションの一例を示す図
【図3】シミュレーションに用いた物体およびルーズサポートを示す図
【図4】初期値が異なる回復イメージの例を示す図
【図5】従来の平均化処理(実空間での平均操作)の結果の一例を示す図
【図6】本発明に係るフーリエ反復位相回復法の原理(アルゴリズム)を示す図
【図7】本発明に係るフーリエ反復位相回復法における平均化処理(フーリエ空間での平均操作)の結果の一例を示す図
【図8】本発明に係るフーリエ反復位相回復法の効果の一例を定量的に示す図
【図9】本発明に係るフーリエ反復位相回復法が適用された電子回折顕微鏡のハードウエア構成の一例を示すブロック図
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態について、図面を用いて詳細に説明する。
【0024】
上記のように、実像に対する平均化は分解能を劣化させる原因となる。本発明者は、この問題に対して、平均化を、従来のように計算機によって得られる複数の物体に対して行うのではなく、それぞれの物体に対してフーリエ変換を施して得られる振幅を用いて平均操作を行うことによって解決することを見出した。すなわち、本発明では、フーリエ反復位相回復法によって得られる複数の計算結果をもとに、フーリエ空間の振幅に対して平均操作を行い、得られた振幅平均を新たな振幅とし、この新たな振幅をもとにしてフーリエ反復位相回復法を適用し、位相を求める。この平均化処理方法では、それぞれの物体に対してフーリエ変換を施して得られる振幅は、それぞれの原点が共通であるため、平均操作を行うためにシフトや反転などの計算を行う必要がない。
【0025】
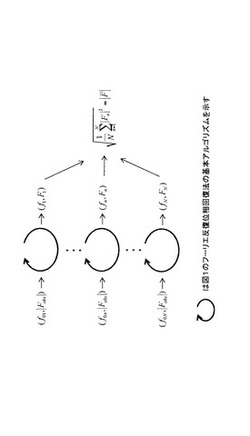
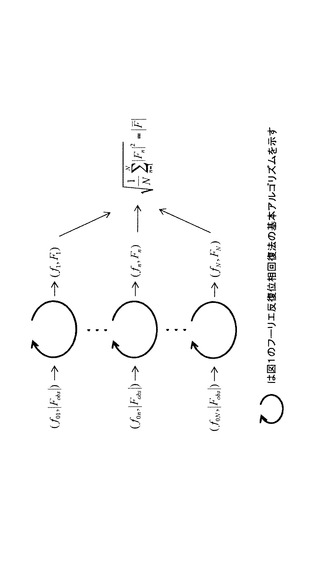
図6は、本発明に係るフーリエ反復位相回復法の原理(アルゴリズム)を示す図である。
【0026】
まず、本発明の原理を説明する。
【0027】
上記のように、本発明では、フーリエ反復位相回復法によって得られる複数の計算結果をもとに、フーリエ空間の振幅に対して平均操作を行う。そこで、実験によって得られた1つのフーリエ拘束条件|Fobs|をもとに、図1に示すフーリエ反復位相回復法によって得られた、フーリエ空間でのN個の複素関数を、式(2)で表す。
【0028】
【数2】
【0029】
そして、N個の振幅に対して平均操作を行う。平均操作の方法は複数あるが、ここでは、図6に示すように、例えば、式(3)に示す、振幅の二乗を平均することによって得られる二乗平均を例にとる。
【0030】
【数3】
【0031】
そして、得られた振幅平均を新たな振幅とし、フーリエ拘束条件|Fobs|に代えて、この新たな振幅をもとにしてフーリエ反復位相回復法を適用し、位相を求める。具体的には、式(3)で与えられる平均を新たなフーリエ拘束条件として、フーリエ反復位相回復法を適用し、位相を求める。
【0032】
なお、平均操作の方法は、上記の二乗平均(L2ノルム)に限定されない。例えば、振幅を二乗せずに、式(4)に示す、振幅の絶対値の平均(L1ノルム)なども適用可能である。
【0033】
【数4】
【0034】
次に、本発明のアルゴリズムについて説明する(図6参照)。
【0035】
本発明のアルゴリズムは、一例として、例えば、以下のステップ1〜4により構成されている。
【0036】
(ステップ1)フーリエ拘束条件を|Fobs|とし、N個の異なる初期物体をf0n(n=1、2、…、N)とする。ここで、nは物体の番号である。
【0037】
(ステップ2)N個の(f0n、|Fobs|)(n=1、2、…、N)をもとにして、図1のフーリエ反復位相回復法の基本アルゴリズムによって、N個の(fn、Fn)(n=1、2、…、N)を求める。
【0038】
(ステップ3)ステップ2で得られたN個のFn(n=1、2、…、N)から、振幅の平均を求める。平均操作の方法は、例えば、二乗平均を用いる(式(3)参照)。
【0039】
(ステップ4)ステップ3で得られた振幅の平均を、新たなフーリエ拘束条件として、図1のフーリエ反復位相回復法の基本アルゴリズムによって位相を求め、実像を得る。
【0040】
次に、本発明の作用効果について説明する。
【0041】
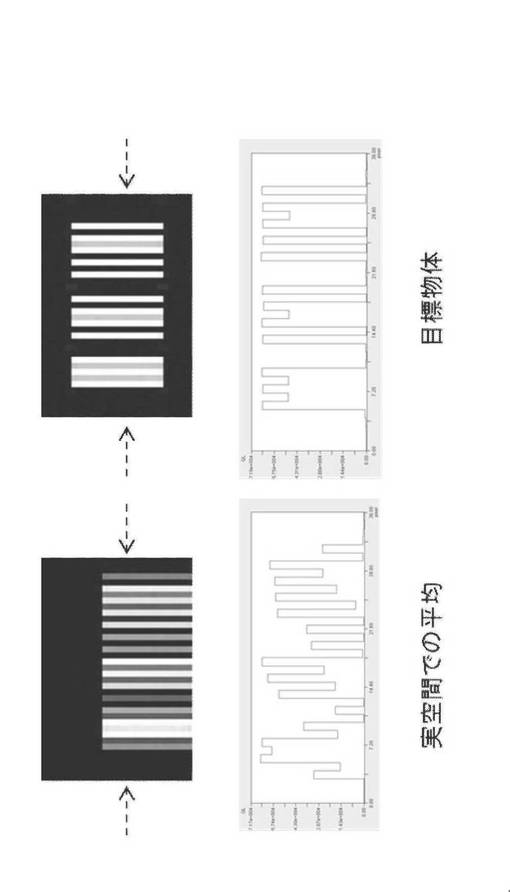
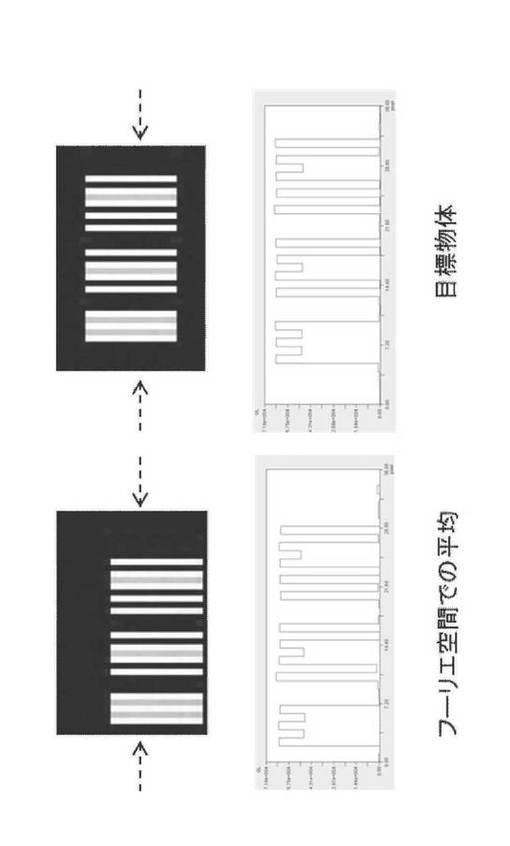
まず、本発明のアルゴリズム(図6参照)を用いて、本発明の作用を説明する。図7は、本発明に係るフーリエ反復位相回復法における平均化処理(フーリエ空間での平均操作)の結果の一例を示す図である。ここでは、例えば、図4の回復イメージを得たのと同様なシミュレーション条件を採用した。具体的には、図3に示す物体およびルーズサポートを用いて作成した1000個のイメージ(回折パターン)を初期値とした。回折パターンは、上記のように、総カウント数を106個とし、式(1)で与えられる、ρを期待値とするポアソン分布P(n;ρ)で量子ノイズを計算したものである。また、オブジェクト拘束条件として、実関数・非負性およびサポートの外をゼロとし、5000回まではHIOの更新アルゴリズムを適用し、それ以降10000回まではERの更新アルゴリズムを適用した。そして、1000個のイメージを初期値としてそれぞれ位相回復を行うことによって、初期値の異なる1000個の回復イメージが得られる。
【0042】
したがって、初期値の異なる1000個の回復イメージに対応して、フーリエ空間にも1000個の振幅がある。本発明では、これらを二乗平均し、得られた振幅平均を新たなフーリエ拘束条件として、他は、例えば、図4の回復イメージを得たのと同様なシミュレーション条件で、フーリエ反復位相回復法を適用し、位相を求める。その結果が図7の左側である。図7の右側には、比較のために、目標物体を示している。この目標物体は、本例では当然、図4および図5に示す目標物体と同じである。
【0043】
まず、図7の上段のイメージを比較すると、フーリエ空間での平均操作によって得られた物体は位置がずれているが、物体を構成しているスリットの数およびコントラストは目標物体と区別がつかないほど、よく一致している。また、下段の強度プロファイルを比較すると、わずかに強度の違いが見られるが、定量的にとてもよい一致を示していることがわかる。すなわち、同じシミュレーション条件の下、本発明に係る平均化処理(フーリエ空間での平均操作)に基づく図7と従来の平均化処理(実空間での平均操作)に基づく図5とを比較した場合、明らかに、前者のほうが、目標物体に近いイメージが再構成されていることがわかる。
【0044】
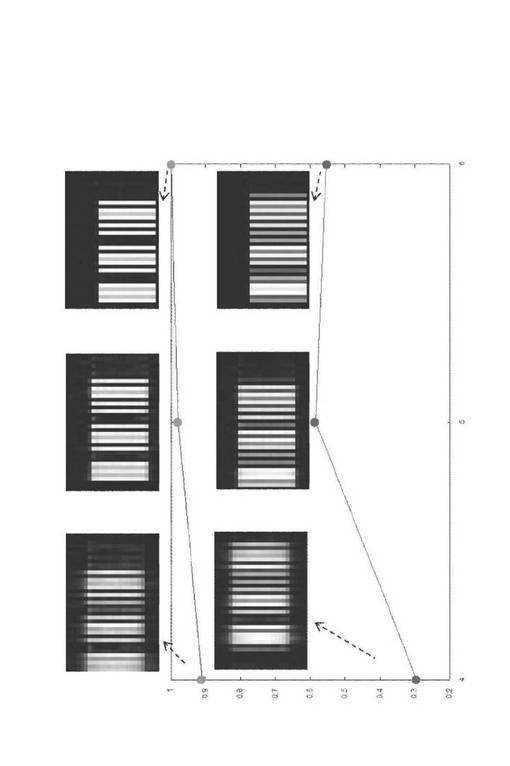
次に、本発明の効果を説明する。図8は、本発明に係るフーリエ反復位相回復法の効果の一例を定量的に示す図である。具体的には、図8は、フーリエ空間での平均化(本発明に係る平均化処理)の場合と実像に対する平均化(従来の平均化処理)の場合との定量的な比較を示している。
【0045】
ここでは、本発明の効果を定量的に評価するために、実像に対する平均化によって得られるイメージと、フーリエ空間での平均化をもとにフーリエ反復位相回復法によって得られるイメージとを、上記シミュレーション条件のうち回折パターンの総カウント数を変えることにより、定量的に比較した。図8は、その結果を示すグラフである。横軸は、回折パターンの総カウント数であり、縦軸は、目標物体との相関値である。ここでは、回折パターンの総カウント数として106個、105個、104個の3点(横軸)について、従来手法である実像に対する平均化によって得られるイメージと、上記のアルゴリズム(図6参照)により、フーリエ空間での平均化をもとにフーリエ反復位相回復法によって得られるイメージに対して、目標物体との相関値(縦軸)を計算した。回折パターンの総カウント数が低ければ、ノイズが大きくなっている。
【0046】
図8のグラフにおいて、上側の線は、フーリエ空間での平均化の場合であり、下側の線は、実像に対する平均化の場合である。前者の場合は、後者の場合と比較して、どの総カウント数に対しても、目標物体との相関は有意に大きい値を示していることが定量的にわかる。また、各計算値の上に示したイメージを比較すると、どの総カウント数に対しても、フーリエ空間での平均化によって得られたイメージが、実像に対する平均化によって得られたイメージより目標物体に近いことがわかる。
【0047】
このように、本実施の形態によれば、実像の平均化処理によって生ずるボケを解消することができ、ノイズなどを含む不完全な回折パターンに対しても、オリジナルに近い実像を再構成することができる。すなわち、本発明の平均化処理(フーリエ空間での平均操作)は、従来の平均化処理(実空間での平均操作)に比べて、格別の効果が得られる。
【0048】
以下、具体的な装置への適用例について説明する。ここでは、単なる一例として、例えば、電子顕微鏡を用いた回折イメージングへの適用例について説明する。
【0049】
回折パターンを実験によって測定し、これをもとに計算機のデジタル処理によって実像を得る回折イメージングを実施するための主要構成要素は、回折パターン計測装置と計算機である。本発明に係るフーリエ反復位相回復法を実施するためのアルゴリズムは、プログラムとして、所定の記憶装置に格納され、計算機によって実行される。以下では、本発明に係るフーリエ反復位相回復法の一適用例として、例えば、電子回折顕微鏡への適用例について説明する。電子回折顕微鏡とは、従来の電子顕微鏡の性能を活かしつつ、結像のための対物レンズを使用せずに回折パターンを計測可能とする電子顕微鏡である。なお、本発明に係るフーリエ反復位相回復法の適用例が電子回折顕微鏡に限定されないことは当然である。
【0050】
図9は、本発明に係るフーリエ反復位相回復法が適用された電子回折顕微鏡のハードウエア構成の一例を示すブロック図である。なお、一般に、実像の再構成には、大別して、ハードウエアとソフトウエアが必要であるが、図9は、電子回折顕微鏡のハードウエアのみを示している。
【0051】
図9に示す電子回折顕微鏡10のハードウエアは、大別して、入射系100、試料系200、検出系300、および計算機系400から構成されている。入射系100、試料系200、および検出系300は、真空の筐体500に収納されている。
【0052】
入射系100は、平行な電子線を試料に照射する機能を有し、電子線を発生する電子源110と、平行照射用のレンズ系120とを有する。平行照射用レンズ系120は電磁レンズで構成されている。電子源110で発生した電子線は、平行照射用レンズ系120によって平行な電子ビームとなり、試料系200に照射される。
【0053】
試料系200は、試料を固定するとともに試料の環境を制御する機能を有し、サポート用スリット210と、試料220とを有する。サポート用スリット210は、中心に孔212が形成されており、電子線の照射方向に対して試料220の手前に配置される。サポート用スリット210によって実空間のオブジェクト拘束条件として「位相」を付加することができる。すなわち、サポート用スリット210の強度分布および位相分布は、フーリエ反復位相回復法におけるオブジェクト拘束条件として付与される。試料220は、図示しない試料台に載置されている。
【0054】
なお、ここで、「サポート」とは、試料(観察領域)を含む領域のことである。また、「サポート用スリット」とは、試料を含む領域とそれ以外の領域の2つを構成するものであり、前者は目標とする像(フーリエ反復位相回復法によって得られる像)であり、後者はオブジェクト拘束条件として振幅をゼロとする領域である。
【0055】
検出系300は、試料からの回折パターンの強度を計測する機能を有し、対物レンズ310と、コース検出器320と、ファイン検出器330とを有する。ファイン検出器330(例えば、エバルト球検出器)の中心には孔332が形成されている(中心孔付き2次元検出器)。すなわち、本適用例では、検出系300は、コース系とファイン系の2つを備えている。ここで、コース系は、物理的な対物レンズ(電気的にオンオフ可能な対物レンズ)310によって、空間分解能が比較的低い像を得るための検出系であり、ファイン系は、物理的な対物レンズを用いることなく、回折パターンの強度を用いてフーリエ反復位相回復法によってより高い空間分解能を得るための検出系である。対物レンズ310とコース検出器320はコース系に含まれ、ファイン検出器330はファイン系に含まれている。コース系とファイン系を両方備えることで、コース系で得られた低分解能の実空間像をファイン系の位相回復の拘束条件として用いることが可能になり、高分解画像を得ることができる。なお、対物レンズ310は電磁レンズで構成されており、図9では、中間レンズや投影レンズなどの拡大レンズ系は省略してある。また、構成によっては、コース検出器とファイン検出器とは1つにして兼用することも可能である。
【0056】
計算機系400は、検出系300によって計測された回折パターンの強度をもとにフーリエ反復位相回復法を用いて物体の像を再構成する機能を有し、コンピュータ410で構成されている。検出系300のコース検出器320およびファイン検出器330は、コンピュータ410にそれぞれ接続されている。また、計算機系400の処理結果は、入射系100、試料系200、および検出系300にそれぞれフィードバックされる。
【0057】
なお、図示しないが、コンピュータ410は、プログラム(アルゴリズム)を実行するCPUや、プログラムを記憶する記憶装置(ROMやRAM、ハードディスクなど)、処理結果を表示するディスプレイなどを有する。上記したアルゴリズムは、プログラムとして、コンピュータ410に内蔵された記憶装置またはコンピュータ410に接続可能なコンピュータ読み取り可能な記憶媒体(CD−ROMやDVDなど)に格納されている。
【0058】
図9の電子顕微鏡10においては、電子源110から発射された電子線は、平行照射用レンズ系120によって平行ビームに整形された後、サポート用スリット210を通過して試料220に入射する。このとき、電子顕微鏡10を用いて高分解能画像を得る手順は、大別して、(1)コース系によるコースイメージの取得と、(2)ファイン系による位相回復アルゴリズムを用いたファインイメージの再構成に分けられる。前者は、対物レンズ310を用いて、粗い実像(以下「コースイメージ」という)を取得するプロセスであり、後者は、前者のプロセスで得られたコースイメージを実空間の拘束条件として、高分解能な実像(以下「ファインイメージ」という)を位相回復アルゴリズムによって再構成するプロセスである。
【0059】
このように、図9の電子回折顕微鏡10では、従来得られている手法で荒い画像(コースイメージ)を観察し、さらに高い分解能を求めたい場合はフーリエ反復位相回復法で詳細な画像(ファインイメージ)を観察する。フーリエ反復位相回復法として、本発明に係るフーリエ反復位相回復法を利用することによって、ノイズなどを含む不完全な回折パターンに対しても、オリジナルに近い実像を再構成することができる。
【産業上の利用可能性】
【0060】
本発明に係るフーリエ反復位相回復法(アルゴリズム)は、ノイズなどを含む不完全な回折パターンに対しても、オリジナルに近い実像を再構成することができるという効果を奏し、例えば、X線・光・電子線を利用した回折イメージングや、CTなど幅広く適用可能である。
【符号の説明】
【0061】
1 検出器
10 電子回折顕微鏡
100 入射系
110 電子源
120 平行照射用レンズ系
200 試料系
210 サポート用スリット
212、332 孔
220 試料
300 検出系
310 対物レンズ
320 コース検出器
330 ファイン検出器
400 計算機系
410 コンピュータ
500 真空筐体
【技術分野】
【0001】
本発明は、フーリエ反復位相回復法、特に、その平均操作に関する方法(平均化処理方法)に関する。
【背景技術】
【0002】
振幅のみが既知で、位相が得られない状況において、フーリエ変換を繰り返し行うことによって位相を求める方法は、フーリエ反復位相回復法として知られている。フーリエ反復位相回復法の基本は、非特許文献1、2によって与えられる。
【0003】
この手法は、現在、多くの分野で応用されている。例えば、X線、光、または電子線を利用した回折イメージングと呼ばれる分野がその1つである。また、この手法は、例えば、CT(Computer Tomography)の分野でも応用されている(非特許文献3参照)。
【0004】
ここでは、以下、説明を容易にするために、回折イメージングを例にとって説明するが、回折イメージングに限定されないことは当然である。
【0005】
フーリエ反復位相回復法とは、フーリエ変換によって関係付けられた2つの関数の間で、位相を求めるための方法を指す。図1は、フーリエ反復位相回復法の基本アルゴリズムを示す図である。図2において、物体(厳密には、入射波と物体とが相互作用した物体波)をfとし、物体fに対してフーリエ変換FTを施したもの(厳密には、検出面での回折波)をFとする。fとFは複素関数(複素数を変数とし、複素数に値をもつ関数)とし、対応する振幅および位相を、それぞれ、|f|と|F|、および、φとΦとする。一般的に、回折実験によって得られる物理量は、回折強度、即ち振幅|F|のみであり、位相Φは得られない。もし何らかの方法で位相Φが求められれば、Fに逆フーリエ変換FT−1を施すことで物体fが得られる。このために、非特許文献1、2では、位相を求めるための「フーリエ反復位相回復法(Fourier Iterative Phase Retrieval)」を提案した。フーリエ反復位相回復法は、図1に示すように、実空間と逆空間(周波数空間)の両方でそれぞれの拘束条件、つまり、「オブジェクト拘束条件(Object Constraint)」と、「フーリエ拘束条件(Fourier Constraint)」(回折実験によって得られた振幅|F|)とを課しながら、フーリエ変換と逆フーリエ変換を逐次的に交互に繰り返すことによって位相を得る手法である。この手法によって物体のイメージが得られることは、非特許文献4で実験的に実証された。なお、オブジェクト拘束条件の与え方は、具体的なアルゴリズムで異なる。
【0006】
図2は、回折イメージングのシミュレーションの一例を示す図である。ここでは、フーリエ拘束条件として、左側の回折パターンを用い、オブジェクト拘束条件として、実関数・非負性およびサポート(物体を取り囲む領域)の外をゼロとし、5000回まではHIO(Hybrid Input-Output)と呼ばれる更新アルゴリズムを適用し、それ以降10000回まではER(Error Reduction)と呼ばれる更新アルゴリズムを適用して、右側の実像が得られた。これはシミュレーションであるため、実像をもとに回折パターンを作成したが、オリジナルの実像が忠実に再構成されている。
【0007】
回折イメージングとは、図2に示すように、実験によって計測された回折パターンをもとに、計算機による数値計算によって実像を得るイメージング手法であり、物理的なレンズの機能をデジタル計算によって実現する「デジタルレンズ」と言える。
【先行技術文献】
【非特許文献】
【0008】
【非特許文献1】R. W. Gerchberg, Nature, 240, 404-406, 1972
【非特許文献2】J. R. Fienup, Appl. Opt., 21(15), 2758-2769, 1982
【非特許文献3】R. Rangayyan, A. P. Dhawan, and R. Gordon: Algorithms for limited-view computed tomography: an annotated bibliography and a challenge, APPLIED OPTICS, 24(23), 1985
【非特許文献4】J. Miao, P. Charalambous, J. Kirz and D. Sayre: Nature, 400, 342-344, 1999
【非特許文献5】H. Shioya, Y. Maehara, and K. Gohara: Spherical shell structure of distribution of images reconstructed by diffractive imaging, J. Opt. Soc. Am. A, 27(5), pp.1214-1218, 2010
【発明の概要】
【発明が解決しようとする課題】
【0009】
実像をフーリエ変換した理想的な回折パターンが得られれば、図2に示すように、理想的な実像を再構成することができる。しかし、実験によって得られる回折パターンにはいろいろなノイズが含まれる。特に、X線または電子の量子性に起因する量子ノイズは、原理的に取り除くことができない。すなわち、現実には、理想的な回折パターンを得ることは不可能であり、不完全な回折パターンを用いることになる。このような状況では、オブジェクト拘束条件と不完全な回折パターンとのミスマッチが生じ、収束先が一意に定まらず、初期条件または繰り返し回数によって異なる実像が図1のアルゴリズムによって得られる。すなわち、実験によって得られた同一の回折パターンに対して、複数の異なる実像が得られることになる。この問題の対処法としては、従来、複数の異なる実像を足し合せて平均化したものを最終的な結果とすることが一般的に行われている(非特許文献5参照)。
【0010】
計算機によって得られる1つ1つのイメージは、得られるべき理想的なイメージに対して、平行移動や反転などが生じたものであり、複数の物体のイメージの平均化を行うためには、これらを補正する必要がある。しかし、平均化処理によってイメージにボケが生じ、これは分解能を劣化させる原因となる。
【0011】
図1に示すフーリエ反復位相回復法で説明したように、この方法では、オブジェクト拘束条件と呼ばれる「事前情報(Prior)」が重要な役割を果たしている。事前情報の1つに、物体を取り囲む領域(サポート)がある。サポートには、実験精度内での誤差が生じる。よく知られているように、誤差がゼロの場合を「タイトサポート」、誤差がある場合を「ルーズサポート」とそれぞれ呼んで、両者を区別している。図2は、タイトサポートの場合のシミュレーション結果である。現実の実験では、誤差がゼロの場合はあり得ないため、ルーズサポートが事前情報(Prior)の1つとしてアルゴリズムに組み込まれることになる。
【0012】
以下、ルーズサポートで、回折パターンに量子ノイズが重畳している場合のシミュレーションを示す。
【0013】
図3は、シミュレーションに用いた物体およびルーズサポートを示す図である。図3に示すように、物体は、3種類の細長いスリット27本を不規則に並べたものとする(27×15ピクセル)。各スリットのサイズは、幅1ピクセル、長さ15ピクセルである。また、スリットの種類は、値が1(白)、0.75(グレー)、0(黒)の3種類である。サポートは、物体の周辺(上下左右)にそれぞれ5ピクセルの幅を持たせ、横37ピクセル、縦25ピクセルとする(37×25ピクセル)。すなわち、サポートは、物体よりも広い領域のルーズサポートとする。
【0014】
シミュレーションでは、ルーズサポートを中心に配置し、実像の全領域を128×128ピクセルとした。そして、実像を配置してフーリエ変換を施して得られた振幅の2乗に、量子ノイズを重畳し、これを、観測によって得られる回折パターンとした。そして、サポート内が一様乱数によって生成されたランダムな値をとるイメージを1000個作成した。そして、図1に示すフーリエ反復位相回復法を適用して、これら1000個のイメージを初期値としてそれぞれ位相回復を行い、1000個の回復イメージを得た。図4は、初期値が異なる回復イメージの例を示す図である。図4の破線内には、3つの例を示した。ここでは、回復イメージの一部、具体的には、サポート内(37×25ピクセル)のみ示している。図4の右端には、比較のために、図3と同じ元の物体およびサポートを示した。これが、目標のイメージである。
【0015】
図4に示すように、目標のイメージ(右端)と回復イメージ(破線内)とを比較すると、回復イメージは、3つとも、サポート内において、左右上下に物体の位置がずれていること、さらに、左から2番目の回復イメージは反転(180度回転)もしていることがわかる。また、各回復イメージは1本1本のスリットのコントラストが目標のイメージとは大きく異なっていること、3つの回復イメージはどれも互いに異なるコントラストであることがわかる。
【0016】
なお、回折パターンは、総カウント数を106個とし、量子ノイズは、ρを期待値とするポアソン分布P(n;ρ)で計算した。このポアソン分布P(n;ρ)は、式(1)で与えられる。ここで、nは、各点にノイズがある場合の強度であり、期待値ρは、各点にノイズがない場合の強度である。また、オブジェクト拘束条件として、実関数・非負性およびサポートの外をゼロとし、5000回まではHIOの更新アルゴリズムを適用し、それ以降10000回まではERの更新アルゴリズムを適用した。
【0017】
【数1】
【0018】
図5は、従来の平均化処理(実空間での平均操作)の結果の一例を示す図である。図5の左側上端には、1000個の初期画像から得られた物体の回復イメージ(実像)に対して、サポート内での上下左右に位置がシフトすることによるズレ、および反転した像が得られることを考慮して、1000個の実像を足し合わせ平均化して得られたイメージを示している。図5の左側下端には、左側上端に矢印で示す水平ラインにおける強度プロファイルを示している。図5の右側上端に示す目標のイメージと比較すると、物体の対応関係は見られるものの、両者に大きな違いがあることがわかる。また、図5の右側下端に示す目標物体の強度プロファイルと比較すると、大きな構造の対応関係はあるものの、細かい構造の対応関係が壊れており、明瞭な違いがあることがよくわかる。これは、従来の平均化処理では、図4に示すようなそれぞれ異なるイメージを足し合わせて平均化しているために、ボケが生じた結果である。これは、実像の平均化において一般的に見られる現象である。
【0019】
本発明の目的は、実像の平均化処理によって生ずるボケを解消することができるフーリエ反復位相回復法を提供することである。
【課題を解決するための手段】
【0020】
本発明のフーリエ反復位相回復法は、フーリエ反復位相回復法の基本アルゴリズムによって得られる複数の計算結果をもとに、フーリエ空間の振幅に対して平均操作を行い、得られた振幅平均を新たな振幅とし、この新たな振幅をもとにして前記基本アルゴリズムを適用し、位相を求める。
【発明の効果】
【0021】
本発明によれば、フーリエ反復位相回復法において、実像の平均化処理によって生ずるボケを解消することができ、ノイズなどを含む不完全な回折パターンに対しても、オリジナルの実像に近いイメージを再構成することができる。
【図面の簡単な説明】
【0022】
【図1】フーリエ反復位相回復法の基本アルゴリズムを示す図
【図2】回折イメージングのシミュレーションの一例を示す図
【図3】シミュレーションに用いた物体およびルーズサポートを示す図
【図4】初期値が異なる回復イメージの例を示す図
【図5】従来の平均化処理(実空間での平均操作)の結果の一例を示す図
【図6】本発明に係るフーリエ反復位相回復法の原理(アルゴリズム)を示す図
【図7】本発明に係るフーリエ反復位相回復法における平均化処理(フーリエ空間での平均操作)の結果の一例を示す図
【図8】本発明に係るフーリエ反復位相回復法の効果の一例を定量的に示す図
【図9】本発明に係るフーリエ反復位相回復法が適用された電子回折顕微鏡のハードウエア構成の一例を示すブロック図
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態について、図面を用いて詳細に説明する。
【0024】
上記のように、実像に対する平均化は分解能を劣化させる原因となる。本発明者は、この問題に対して、平均化を、従来のように計算機によって得られる複数の物体に対して行うのではなく、それぞれの物体に対してフーリエ変換を施して得られる振幅を用いて平均操作を行うことによって解決することを見出した。すなわち、本発明では、フーリエ反復位相回復法によって得られる複数の計算結果をもとに、フーリエ空間の振幅に対して平均操作を行い、得られた振幅平均を新たな振幅とし、この新たな振幅をもとにしてフーリエ反復位相回復法を適用し、位相を求める。この平均化処理方法では、それぞれの物体に対してフーリエ変換を施して得られる振幅は、それぞれの原点が共通であるため、平均操作を行うためにシフトや反転などの計算を行う必要がない。
【0025】
図6は、本発明に係るフーリエ反復位相回復法の原理(アルゴリズム)を示す図である。
【0026】
まず、本発明の原理を説明する。
【0027】
上記のように、本発明では、フーリエ反復位相回復法によって得られる複数の計算結果をもとに、フーリエ空間の振幅に対して平均操作を行う。そこで、実験によって得られた1つのフーリエ拘束条件|Fobs|をもとに、図1に示すフーリエ反復位相回復法によって得られた、フーリエ空間でのN個の複素関数を、式(2)で表す。
【0028】
【数2】
【0029】
そして、N個の振幅に対して平均操作を行う。平均操作の方法は複数あるが、ここでは、図6に示すように、例えば、式(3)に示す、振幅の二乗を平均することによって得られる二乗平均を例にとる。
【0030】
【数3】
【0031】
そして、得られた振幅平均を新たな振幅とし、フーリエ拘束条件|Fobs|に代えて、この新たな振幅をもとにしてフーリエ反復位相回復法を適用し、位相を求める。具体的には、式(3)で与えられる平均を新たなフーリエ拘束条件として、フーリエ反復位相回復法を適用し、位相を求める。
【0032】
なお、平均操作の方法は、上記の二乗平均(L2ノルム)に限定されない。例えば、振幅を二乗せずに、式(4)に示す、振幅の絶対値の平均(L1ノルム)なども適用可能である。
【0033】
【数4】
【0034】
次に、本発明のアルゴリズムについて説明する(図6参照)。
【0035】
本発明のアルゴリズムは、一例として、例えば、以下のステップ1〜4により構成されている。
【0036】
(ステップ1)フーリエ拘束条件を|Fobs|とし、N個の異なる初期物体をf0n(n=1、2、…、N)とする。ここで、nは物体の番号である。
【0037】
(ステップ2)N個の(f0n、|Fobs|)(n=1、2、…、N)をもとにして、図1のフーリエ反復位相回復法の基本アルゴリズムによって、N個の(fn、Fn)(n=1、2、…、N)を求める。
【0038】
(ステップ3)ステップ2で得られたN個のFn(n=1、2、…、N)から、振幅の平均を求める。平均操作の方法は、例えば、二乗平均を用いる(式(3)参照)。
【0039】
(ステップ4)ステップ3で得られた振幅の平均を、新たなフーリエ拘束条件として、図1のフーリエ反復位相回復法の基本アルゴリズムによって位相を求め、実像を得る。
【0040】
次に、本発明の作用効果について説明する。
【0041】
まず、本発明のアルゴリズム(図6参照)を用いて、本発明の作用を説明する。図7は、本発明に係るフーリエ反復位相回復法における平均化処理(フーリエ空間での平均操作)の結果の一例を示す図である。ここでは、例えば、図4の回復イメージを得たのと同様なシミュレーション条件を採用した。具体的には、図3に示す物体およびルーズサポートを用いて作成した1000個のイメージ(回折パターン)を初期値とした。回折パターンは、上記のように、総カウント数を106個とし、式(1)で与えられる、ρを期待値とするポアソン分布P(n;ρ)で量子ノイズを計算したものである。また、オブジェクト拘束条件として、実関数・非負性およびサポートの外をゼロとし、5000回まではHIOの更新アルゴリズムを適用し、それ以降10000回まではERの更新アルゴリズムを適用した。そして、1000個のイメージを初期値としてそれぞれ位相回復を行うことによって、初期値の異なる1000個の回復イメージが得られる。
【0042】
したがって、初期値の異なる1000個の回復イメージに対応して、フーリエ空間にも1000個の振幅がある。本発明では、これらを二乗平均し、得られた振幅平均を新たなフーリエ拘束条件として、他は、例えば、図4の回復イメージを得たのと同様なシミュレーション条件で、フーリエ反復位相回復法を適用し、位相を求める。その結果が図7の左側である。図7の右側には、比較のために、目標物体を示している。この目標物体は、本例では当然、図4および図5に示す目標物体と同じである。
【0043】
まず、図7の上段のイメージを比較すると、フーリエ空間での平均操作によって得られた物体は位置がずれているが、物体を構成しているスリットの数およびコントラストは目標物体と区別がつかないほど、よく一致している。また、下段の強度プロファイルを比較すると、わずかに強度の違いが見られるが、定量的にとてもよい一致を示していることがわかる。すなわち、同じシミュレーション条件の下、本発明に係る平均化処理(フーリエ空間での平均操作)に基づく図7と従来の平均化処理(実空間での平均操作)に基づく図5とを比較した場合、明らかに、前者のほうが、目標物体に近いイメージが再構成されていることがわかる。
【0044】
次に、本発明の効果を説明する。図8は、本発明に係るフーリエ反復位相回復法の効果の一例を定量的に示す図である。具体的には、図8は、フーリエ空間での平均化(本発明に係る平均化処理)の場合と実像に対する平均化(従来の平均化処理)の場合との定量的な比較を示している。
【0045】
ここでは、本発明の効果を定量的に評価するために、実像に対する平均化によって得られるイメージと、フーリエ空間での平均化をもとにフーリエ反復位相回復法によって得られるイメージとを、上記シミュレーション条件のうち回折パターンの総カウント数を変えることにより、定量的に比較した。図8は、その結果を示すグラフである。横軸は、回折パターンの総カウント数であり、縦軸は、目標物体との相関値である。ここでは、回折パターンの総カウント数として106個、105個、104個の3点(横軸)について、従来手法である実像に対する平均化によって得られるイメージと、上記のアルゴリズム(図6参照)により、フーリエ空間での平均化をもとにフーリエ反復位相回復法によって得られるイメージに対して、目標物体との相関値(縦軸)を計算した。回折パターンの総カウント数が低ければ、ノイズが大きくなっている。
【0046】
図8のグラフにおいて、上側の線は、フーリエ空間での平均化の場合であり、下側の線は、実像に対する平均化の場合である。前者の場合は、後者の場合と比較して、どの総カウント数に対しても、目標物体との相関は有意に大きい値を示していることが定量的にわかる。また、各計算値の上に示したイメージを比較すると、どの総カウント数に対しても、フーリエ空間での平均化によって得られたイメージが、実像に対する平均化によって得られたイメージより目標物体に近いことがわかる。
【0047】
このように、本実施の形態によれば、実像の平均化処理によって生ずるボケを解消することができ、ノイズなどを含む不完全な回折パターンに対しても、オリジナルに近い実像を再構成することができる。すなわち、本発明の平均化処理(フーリエ空間での平均操作)は、従来の平均化処理(実空間での平均操作)に比べて、格別の効果が得られる。
【0048】
以下、具体的な装置への適用例について説明する。ここでは、単なる一例として、例えば、電子顕微鏡を用いた回折イメージングへの適用例について説明する。
【0049】
回折パターンを実験によって測定し、これをもとに計算機のデジタル処理によって実像を得る回折イメージングを実施するための主要構成要素は、回折パターン計測装置と計算機である。本発明に係るフーリエ反復位相回復法を実施するためのアルゴリズムは、プログラムとして、所定の記憶装置に格納され、計算機によって実行される。以下では、本発明に係るフーリエ反復位相回復法の一適用例として、例えば、電子回折顕微鏡への適用例について説明する。電子回折顕微鏡とは、従来の電子顕微鏡の性能を活かしつつ、結像のための対物レンズを使用せずに回折パターンを計測可能とする電子顕微鏡である。なお、本発明に係るフーリエ反復位相回復法の適用例が電子回折顕微鏡に限定されないことは当然である。
【0050】
図9は、本発明に係るフーリエ反復位相回復法が適用された電子回折顕微鏡のハードウエア構成の一例を示すブロック図である。なお、一般に、実像の再構成には、大別して、ハードウエアとソフトウエアが必要であるが、図9は、電子回折顕微鏡のハードウエアのみを示している。
【0051】
図9に示す電子回折顕微鏡10のハードウエアは、大別して、入射系100、試料系200、検出系300、および計算機系400から構成されている。入射系100、試料系200、および検出系300は、真空の筐体500に収納されている。
【0052】
入射系100は、平行な電子線を試料に照射する機能を有し、電子線を発生する電子源110と、平行照射用のレンズ系120とを有する。平行照射用レンズ系120は電磁レンズで構成されている。電子源110で発生した電子線は、平行照射用レンズ系120によって平行な電子ビームとなり、試料系200に照射される。
【0053】
試料系200は、試料を固定するとともに試料の環境を制御する機能を有し、サポート用スリット210と、試料220とを有する。サポート用スリット210は、中心に孔212が形成されており、電子線の照射方向に対して試料220の手前に配置される。サポート用スリット210によって実空間のオブジェクト拘束条件として「位相」を付加することができる。すなわち、サポート用スリット210の強度分布および位相分布は、フーリエ反復位相回復法におけるオブジェクト拘束条件として付与される。試料220は、図示しない試料台に載置されている。
【0054】
なお、ここで、「サポート」とは、試料(観察領域)を含む領域のことである。また、「サポート用スリット」とは、試料を含む領域とそれ以外の領域の2つを構成するものであり、前者は目標とする像(フーリエ反復位相回復法によって得られる像)であり、後者はオブジェクト拘束条件として振幅をゼロとする領域である。
【0055】
検出系300は、試料からの回折パターンの強度を計測する機能を有し、対物レンズ310と、コース検出器320と、ファイン検出器330とを有する。ファイン検出器330(例えば、エバルト球検出器)の中心には孔332が形成されている(中心孔付き2次元検出器)。すなわち、本適用例では、検出系300は、コース系とファイン系の2つを備えている。ここで、コース系は、物理的な対物レンズ(電気的にオンオフ可能な対物レンズ)310によって、空間分解能が比較的低い像を得るための検出系であり、ファイン系は、物理的な対物レンズを用いることなく、回折パターンの強度を用いてフーリエ反復位相回復法によってより高い空間分解能を得るための検出系である。対物レンズ310とコース検出器320はコース系に含まれ、ファイン検出器330はファイン系に含まれている。コース系とファイン系を両方備えることで、コース系で得られた低分解能の実空間像をファイン系の位相回復の拘束条件として用いることが可能になり、高分解画像を得ることができる。なお、対物レンズ310は電磁レンズで構成されており、図9では、中間レンズや投影レンズなどの拡大レンズ系は省略してある。また、構成によっては、コース検出器とファイン検出器とは1つにして兼用することも可能である。
【0056】
計算機系400は、検出系300によって計測された回折パターンの強度をもとにフーリエ反復位相回復法を用いて物体の像を再構成する機能を有し、コンピュータ410で構成されている。検出系300のコース検出器320およびファイン検出器330は、コンピュータ410にそれぞれ接続されている。また、計算機系400の処理結果は、入射系100、試料系200、および検出系300にそれぞれフィードバックされる。
【0057】
なお、図示しないが、コンピュータ410は、プログラム(アルゴリズム)を実行するCPUや、プログラムを記憶する記憶装置(ROMやRAM、ハードディスクなど)、処理結果を表示するディスプレイなどを有する。上記したアルゴリズムは、プログラムとして、コンピュータ410に内蔵された記憶装置またはコンピュータ410に接続可能なコンピュータ読み取り可能な記憶媒体(CD−ROMやDVDなど)に格納されている。
【0058】
図9の電子顕微鏡10においては、電子源110から発射された電子線は、平行照射用レンズ系120によって平行ビームに整形された後、サポート用スリット210を通過して試料220に入射する。このとき、電子顕微鏡10を用いて高分解能画像を得る手順は、大別して、(1)コース系によるコースイメージの取得と、(2)ファイン系による位相回復アルゴリズムを用いたファインイメージの再構成に分けられる。前者は、対物レンズ310を用いて、粗い実像(以下「コースイメージ」という)を取得するプロセスであり、後者は、前者のプロセスで得られたコースイメージを実空間の拘束条件として、高分解能な実像(以下「ファインイメージ」という)を位相回復アルゴリズムによって再構成するプロセスである。
【0059】
このように、図9の電子回折顕微鏡10では、従来得られている手法で荒い画像(コースイメージ)を観察し、さらに高い分解能を求めたい場合はフーリエ反復位相回復法で詳細な画像(ファインイメージ)を観察する。フーリエ反復位相回復法として、本発明に係るフーリエ反復位相回復法を利用することによって、ノイズなどを含む不完全な回折パターンに対しても、オリジナルに近い実像を再構成することができる。
【産業上の利用可能性】
【0060】
本発明に係るフーリエ反復位相回復法(アルゴリズム)は、ノイズなどを含む不完全な回折パターンに対しても、オリジナルに近い実像を再構成することができるという効果を奏し、例えば、X線・光・電子線を利用した回折イメージングや、CTなど幅広く適用可能である。
【符号の説明】
【0061】
1 検出器
10 電子回折顕微鏡
100 入射系
110 電子源
120 平行照射用レンズ系
200 試料系
210 サポート用スリット
212、332 孔
220 試料
300 検出系
310 対物レンズ
320 コース検出器
330 ファイン検出器
400 計算機系
410 コンピュータ
500 真空筐体
【特許請求の範囲】
【請求項1】
フーリエ反復位相回復法の基本アルゴリズムによって得られる複数の計算結果をもとに、フーリエ空間の振幅に対して平均操作を行い、得られた振幅平均を新たな振幅とし、この新たな振幅をもとにして前記基本アルゴリズムを適用し、位相を求める、
フーリエ反復位相回復法。
【請求項2】
前記平均操作は、振幅の二乗平均である、請求項1記載のフーリエ反復位相回復法。
【請求項3】
前記平均操作は、振幅の絶対値の平均である、請求項1記載のフーリエ反復位相回復法。
【請求項1】
フーリエ反復位相回復法の基本アルゴリズムによって得られる複数の計算結果をもとに、フーリエ空間の振幅に対して平均操作を行い、得られた振幅平均を新たな振幅とし、この新たな振幅をもとにして前記基本アルゴリズムを適用し、位相を求める、
フーリエ反復位相回復法。
【請求項2】
前記平均操作は、振幅の二乗平均である、請求項1記載のフーリエ反復位相回復法。
【請求項3】
前記平均操作は、振幅の絶対値の平均である、請求項1記載のフーリエ反復位相回復法。
【図6】

【図9】

【図1】
【図2】

【図3】

【図4】

【図5】
【図7】
【図8】
【図9】
【図1】
【図2】
【図3】
【図4】
【図5】
【図7】
【図8】
【公開番号】特開2012−238588(P2012−238588A)
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願番号】特願2012−99896(P2012−99896)
【出願日】平成24年4月25日(2012.4.25)
【出願人】(504173471)国立大学法人北海道大学 (971)
【出願人】(504193837)国立大学法人室蘭工業大学 (70)
【Fターム(参考)】
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願日】平成24年4月25日(2012.4.25)
【出願人】(504173471)国立大学法人北海道大学 (971)
【出願人】(504193837)国立大学法人室蘭工業大学 (70)
【Fターム(参考)】
[ Back to top ]