
不均等分割セグメントの組立装置及び組立方法
【課題】不均等分割セグメントであっても、キーセグメントの位置をリング間継手番号により指定して、各不均等分割セグメントの組立角度を自動設定することができ、かつ前リングと現リングを連結するリング間継手の位置を正確にチェックすることができ、前リングと現リングの周方向継手位置が重なる芋組みの有無を正確にチェックすることができる不均等分割セグメントの組立装置及び組立方法を提供する。
【解決手段】ピースセグメントPを環状に組み立てたリングにおけるリング間継手の周方向位置から、リング間継手の周方向間隔θ2の最大公約数θ3を算出し(S6)、最大公約数θ3を周方向ピッチとする仮想リング間継手C1〜C32を設定し(S7)、各仮想リング間継手に仮想リング間継手番号Cを設定し(S7)、キーセグメントKの位置を仮想リング間継手番号Cにより指定する(S11)。
【解決手段】ピースセグメントPを環状に組み立てたリングにおけるリング間継手の周方向位置から、リング間継手の周方向間隔θ2の最大公約数θ3を算出し(S6)、最大公約数θ3を周方向ピッチとする仮想リング間継手C1〜C32を設定し(S7)、各仮想リング間継手に仮想リング間継手番号Cを設定し(S7)、キーセグメントKの位置を仮想リング間継手番号Cにより指定する(S11)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、シールド掘進機により掘削されたトンネルの内周壁に沿って環状に組み立てられる不均等分割セグメントの組立装置及び組立方法に関する。
【背景技術】
【0002】
シールド掘進機は、カッタヘッド、エレクタ装置、シールドジャッキなどを備える。カッタヘッドは、シールド掘削機本体の前部に設けられ、駆動モータによって回転駆動され、これにより、トンネルを掘削する。エレクタ装置は、トンネルの内周壁に沿ってセグメントを環状に組み付ける動作を行う。シールドジャッキは、シールド掘削機本体の周方向に複数配置され、組み付けられたセグメントを後方に押し付けることで、セグメントから押し付け反力を受け、これにより、シールド掘削機本体を前進させる。
【0003】
上述したシールド掘削機は、例えば特許文献1に開示され、セグメントの組立装置は、例えば特許文献2に開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3081328号公報、「土圧系シールド機械の自動運転制御方法」
【特許文献2】特開2001−193399号公報、「セグメントの組立位置決め装置及び方法」
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したシールド掘削機において、環状のセグメントは、周方向に複数の分割片(以下、「ピースセグメント」又は「Pセグメント」と呼ぶ)に分割されており、そのうち1つがトンネルの円形を保持するためにクサビ状の形状をしており、軸挿入により最後に組み立てられ、「キーセグメント」(又は「Kセグメント」)と呼ばれる。
また、以下の説明において、環状に組み立てられたセグメントを単に「リング」と呼ぶ。
【0006】
従来、セグメントの組立において、キーセグメントの位置は、トンネルの施工上の要求から予め設定され、オペレータによりリング間継手番号で指定される。
「リング間継手番号」とは、既設のリング(以下、「前リング」と呼ぶ)と組立中のリング(以下、「現リング」と呼ぶ)をトンネルの軸方向に連結する継手(「リング間継手」)の番号である。このリング間継手番号は、従来、リング間継手が周方向に均等配置されていることを前提としており、例えば、切羽に対して右回転(時計回り)にトンネルの頂点からN(=1,2,3・・・Nは整数)で指定される。
【0007】
一方、近年、各セグメントの形状が不均一な「不均等分割セグメント」が用いられている。この不均等分割セグメントの場合、環状に組み立てられたリングにおけるリング間継手の周方向位置が不均等であり、キーセグメントの位置をリング間継手番号により指定することができない問題点があった。
【0008】
そのため、不均等分割セグメントの場合、従来、各リングのリング間継手位置を個々に計算し、既設の前リングと照合させて、各セグメントの組立の可否を判断していた。
しかし、不均等分割セグメントの場合、要求されるセグメント種類が多彩であるため、その組立パターンは膨大かつ複雑であり、個々の計算時に人為的ミスが発生しやすく、これに基づくセグメント組立に支障がでるおそれがあった。
【0009】
例えば、前リングと現リングのリング間継手位置は一致する必要があるが、個々に計算した場合、人為的ミスによりリング間継手位置の一部が不一致となるおそれがあった。
また、前リングと現リングの周方向継手位置が重なる(「芋組み」と呼ぶ)と、芋組み部の強度が低下するので、これを回避する必要があるが、個々に計算した場合、人為的ミスにより周方向継手位置の一部が一致するおそれがあった。
【0010】
本発明はかかる問題点を解決するために創案されたものである。すなわち、本発明の目的は、不均等分割セグメントであっても、キーセグメントの位置をリング間継手番号により指定して、各セグメントの組立角度を自動設定することができ、かつ前リングと現リングを連結するリング間継手の位置を正確にチェックすることができ、前リングと現リングの周方向継手位置が重なる芋組みの有無を正確にチェックすることができる不均等分割セグメントの組立装置及び組立方法を提供することにある。
【課題を解決するための手段】
【0011】
本発明によれば、トンネルの内周壁に沿って環状に組み立てる不均等分割セグメントの組立方法であって、
前記不均等分割セグメントは、周方向に分割された複数のピースセグメントからなり、かつそのうち最後に組み付けられるピースセグメントがキーセグメントであり、
(A)前記ピースセグメントを環状に組み立てたリングにおけるリング間継手の周方向位置から、該リング間継手の周方向間隔の最大公約数を算出し、
(B)前記最大公約数を周方向ピッチとする仮想リング間継手を設定し、
(C)前記各仮想リング間継手に仮想リング間継手番号を設定し、
(D)前記キーセグメントの周方向位置を前記仮想リング間継手番号により指定して、ピースセグメントを組み立てる、ことを特徴とする不均等分割セグメントの組立方法が提供される。
【0012】
また本発明によれば、トンネルの内周壁に沿って環状に組み立てる不均等分割セグメントの組立装置であって、
前記不均等分割セグメントは、周方向に分割された複数のピースセグメントからなり、かつそのうち最後に組み付けられるピースセグメントがキーセグメントであり、
前記ピースセグメントを環状に組み立てたリングにおけるリング間継手の周方向位置を記憶する記憶装置と、
前記リング間継手の周方向間隔の最大公約数を算出し、
前記最大公約数を周方向ピッチとする仮想リング間継手を設定し、
前記各仮想リング間継手に仮想リング間継手番号を設定する演算装置と、
前記キーセグメントの周方向位置を前記仮想リング間継手番号により指定する入力装置と、
ピースセグメントを組み立てるエレクタ装置とを備える、ことを特徴とする不均等分割セグメントの組立装置が提供される。
【発明の効果】
【0013】
上記本発明の方法及び装置によれば、演算装置によりリング間継手の周方向間隔の最大公約数を周方向ピッチとする仮想リング間継手を設定し、各仮想リング間継手に仮想リング間継手番号を設定するので、入力装置によりキーセグメントの周方向位置を前記仮想リング間継手番号により指定することができる。
従って、不均等分割セグメントであっても、セグメント種類に依らず、キーセグメントの位置を仮想のリング間継手番号により指定して、各ピースセグメントの組立角度を自動設定することができる。
【0014】
また、キーセグメントの周方向位置と、これに対するリング間継手の周方向位置とから、組立後の現リングにおけるリング間継手の周方向位置を計算し、直前に組み立てた前リングと現リングとで共通するリング間継手の周方向位置を算出することにより、不均等分割セグメントであっても、セグメント種類に依らず、前リングと現リングを連結するリング間継手の位置を正確にチェックすることができる。
【0015】
また、キーセグメントの周方向位置と各ピースセグメントの実組立角度とから、組立後の現リングにおける周方向継手位置を計算し、直前に組み立てた前リングと現リングで共通する周方向継手位置を算出することにより、不均等分割セグメントであっても、セグメント種類に依らず、前リングと現リングの周方向継手位置が重なる芋組みの有無を正確にチェックすることができる。
【図面の簡単な説明】
【0016】
【図1】本発明の装置を備えたシールド掘削機を示す概略断面図である。
【図2】本発明によるセグメント組立装置の構成図である。
【図3】不均等分割セグメントの例を示す正面図である。
【図4】図3の不均等分割セグメントを旋回させたセグメントの組立状態を示す図である。
【図5】本発明によるセグメント組立方法の第1フロー図である。
【図6】本発明によるセグメント組立方法の第2フロー図である。
【図7】本発明によるセグメント組立方法の第3フロー図である。
【図8】本発明によるセグメント組立方法の第4フロー図である。
【発明を実施するための形態】
【0017】
以下、本発明の好ましい実施例を図面を参照して説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0018】
図1は、本発明の装置を備えたシールド掘削機を示す概略断面図である。
この図において、本発明によるセグメント組立装置10は、エレクタ装置7を制御するために設置されている。セグメント組立装置10の設置位置は、この図ではエレクタ装置7の後方に示しているが、エレクタ装置7に近接して設置してもよい。
【0019】
シールド掘削機1は、シールド掘削機の本体2、カッタヘッド3、シールドジャッキ4を有する。シールド掘削機の本体2は、筒状に形成されている。カッタヘッド3は、本体2の前方(図の左側)において、本体2に固定されたフレーム5に回転可能に取り付けられトンネル切削する。切削した土砂はスクリューコンベア(図示せず)等で後方側に排出される。シールドジャッキ4は、フレーム5に取り付けられている。シールドジャッキ4は、その伸長ストロークにより、組み付けられた複数のピースセグメントPからなるセグメントSを後方側に押し、その反力で本体2を前方側に移動させる。なお、エレクタ装置7によるピースセグメントの組付時には、シールドジャッキ4は、エレクタ装置7とピースセグメントに干渉しないように収縮する。
【0020】
シールド掘削機1は、搬送装置6を有する。搬送装置6は、台車6a、ホイスト式のクレーン6b、およびピースセグメントのコンベヤ6cを備える。台車6aは、シールド掘削機1に掘削されたトンネル内を、その後方側(図の右側)からその前方側(図の左側)へピースセグメントPを載せてトンネル軸方向(図の左右方向)に走行し、これによりピースセグメントPをトンネルの前方側へ搬送する。クレーン6bは、トンネル前方側へ走行してきた台車6a上のピースセグメントPを持ち上げて、トンネル前方側へ水平移動し、コンベヤ6cへ当該ピースセグメントPを吊り降ろす。コンベヤ6cは、ローラコンベヤで構成され、クレーン6bによりローラコンベヤ6cに吊り降ろされたピースセグメントPをトンネル前方側へ移動させる。
【0021】
ピースセグメントPは、予め設定された組付順序の順にクレーン6bによりローラコンベヤ6cに吊り降ろされて、組付順序が先のピースセグメントPほどローラコンベヤ6cにおけるトンネル前方側に位置させられる。エレクタ装置7は、ローラコンベヤ6cにおける最もトンネル前方側にあるピースセグメントPから順に、ピースセグメントPを把持しその組付位置へ組み付ける。このようにして、予め設定された組付順序の順にピースセグメントPが組み付けられる。
【0022】
エレクタ装置7は、複数のピースセグメントPを環状のセグメントSに組み立てる。エレクタ装置7は、旋回リング7a、半径方向移動部7d、軸方向移動部7b、および把持装置7cを有する。
旋回リング7aは、図示しない駆動装置によりトンネルの中心軸周りに旋回駆動されるようにフレーム5に支持される。半径方向移動部7dは、トンネルの中心に対する半径方向に往復移動可能である。軸方向移動部7bは、半径方向移動部7dに固定され水平方向に延びるガイド部材8に沿って、図示しない駆動装置により往復移動させられるようにガイド部材8に支持される。把持装置7cは、軸方向移動部7bに取り付けられる。
【0023】
この構成で、エレクタ装置7は次のように動作する。把持装置7cが、最もトンネル前方側にあるピースセグメントのコンベヤ6c上のピースセグメントPを把持し、軸方向移動部7bの移動によりシールド掘削機1のカッタヘッド3があるトンネルの前方側(図の左側)へ移動し、半径方向移動部7dの移動によりピースセグメントをトンネル中心に引き寄せ、次いで、旋回リング7aが中心軸C周りに旋回して把持装置7cを旋回方向に位置決めし、その後、半径方向移動部7dの移動により、前記半径方向に関して組付位置まで外側に移動して、軸方向移動部7bの移動により、把持装置7cが直前に組み立てたセグメントSへ向けて軸方向(例えば、トンネルの軸方向)に移動させて把持しているピースセグメントPのボルト(図示せず)をセグメントのボルト孔(図示せず)へ挿入することができる。これにより、ピースセグメントPを、上述の組付位置に完全に組み付けることができる。
【0024】
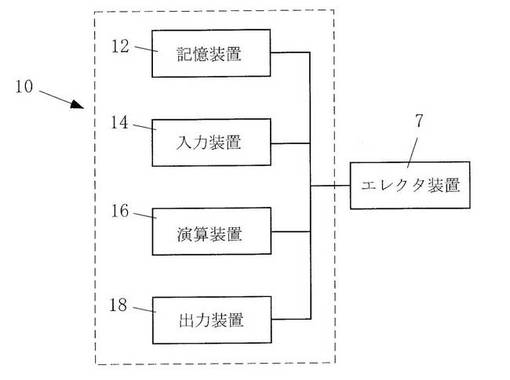
図2は、本発明によるセグメント組立装置の構成図である。
この図に示すように、本発明のセグメント組立装置10は、記憶装置12、入力装置14、演算装置16、及び出力装置18を備える。
【0025】
記憶装置12は、コンピュータの記憶装置(例えば、ROM、RAM、ハードディスク、メモリーカード)であり、種々の不均等分割セグメントSのリング情報とセグメント情報を記憶する。
リング情報とセグメント情報の詳細は後述する。
【0026】
入力装置14は、例えばコンピュータのキーボードであり、リング情報、セグメント情報、及び順序決定条件を記憶装置12に入力する。
なお、入力装置14は、キーボード以外の入力装置(例えばカードリーダ、別の記憶装置)であってもよい。
【0027】
本発明は、セグメントSが不均等分割セグメントである場合を対象としている。「不均等分割セグメント」とは、ピースセグメントPの形状が不均一なセグメントを意味する。
不均等分割セグメントSは、周方向に分割された複数のピースセグメントPからなり、そのうち最後に組み付けられるピースセグメントPがキーセグメントKである。
なお、本発明は、不均等分割セグメントSに限定されず、ピースセグメントPの形状が均一な均等分割セグメントにも適用することができる。
【0028】
順序決定条件は、例えば、最初に組み立てるピースセグメントのピース番号(「第1ピース番号」という)、2番目に組み立てるピースセグメントを決定する「組立パターン」、及び組立順序の優先順位を示す「優先基準」を含む。
【0029】
演算装置16は、コンピュータの演算装置であり、上述したリング情報、セグメント情報、順序決定条件から、各ピースセグメントPの実組立角度、組立順序、及び旋回寄せ方向を決定する。
【0030】
出力装置18は、決定した実組立角度、組立順序、及び旋回寄せ方向をエレクタ装置7に出力する。なお、この出力を例えばCRT、プリンタ等の出力装置に出力してもよい。
【0031】
エレクタ装置7は、決定した実組立角度、組立順序、及び旋回寄せ方向に基づきピースセグメントPを組み立てる。
【0032】
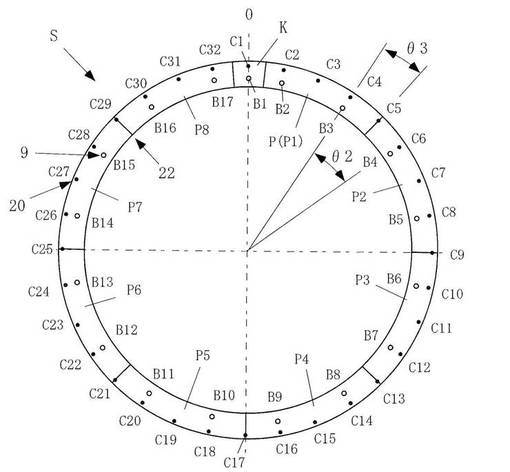
図3は、不均等分割セグメントSの例を示す正面図である。この図は、図1において、坑口側(右側)から切羽側(左側)を見た図に相当する。
なおこの図では、キーセグメントKが頂部に位置するように、仮に定められているが、周方向位置は任意である。
【0033】
ピースセグメントPは、トンネルの周方向に間隔を隔てて配置されたリング間継手9でトンネルの軸方向にボルトとナット等で連結される。このリング間継手9の周方向位置は、この例では不均等であり、セグメントの種類毎に任意に設定されている。
【0034】
図3において、リング間継手9は、相対的位置として仮に頂部から図で右回りに順にB1〜B17の位置に設定されている。以下、リング間継手9の位置番号をB=1〜17とする。ここで、Bは正の整数である。
【0035】
不均等分割セグメントSを構成するピースセグメントPの分割角度と仮想組立角度は、セグメントの種類毎に予め決められている。
ここで、「分割角度」とは、各ピースセグメントPが占める周方向角度である。また、「仮想組立角度」とは、例えば図3のように仮に定めた場合の、各ピースセグメントPの周方向中心が位置する周方向角度である。
【0036】
図3の例において、不均等分割セグメントSを構成するピースセグメントPのピース番号を、キーセグメントKから図で右回りに、P1〜P8とする。
以下、特に区別しない限り、キーセグメントKを含めてピースセグメントPと呼び、個々のピースセグメントはピース番号P1〜P8で区別する。
【0037】
図3において、C1〜C32は仮想リング間継手20(後述する)であり、相対的位置として仮に頂部から図で右回りに順にC1〜C32の位置に設定されている。以下、仮想リング間継手20の位置番号をC=1〜32とする。ここで、Cは正の整数である。
仮想リング間継手20の詳細は、後述する。
【0038】
また、この図において、22はピースセグメントを周方向に連結する周方向継手位置である。
【0039】
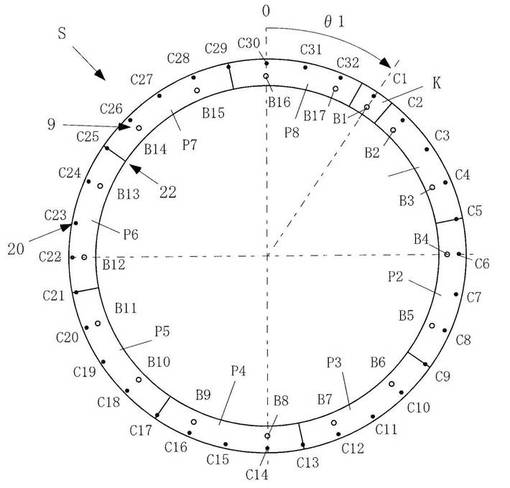
図4は、図3の不均等分割セグメントSを組立オフセット角θ1だけ回転させた状態を示している。
組立オフセット角θ1の説明は、後述する。
【0040】
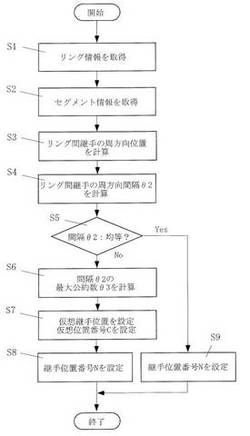
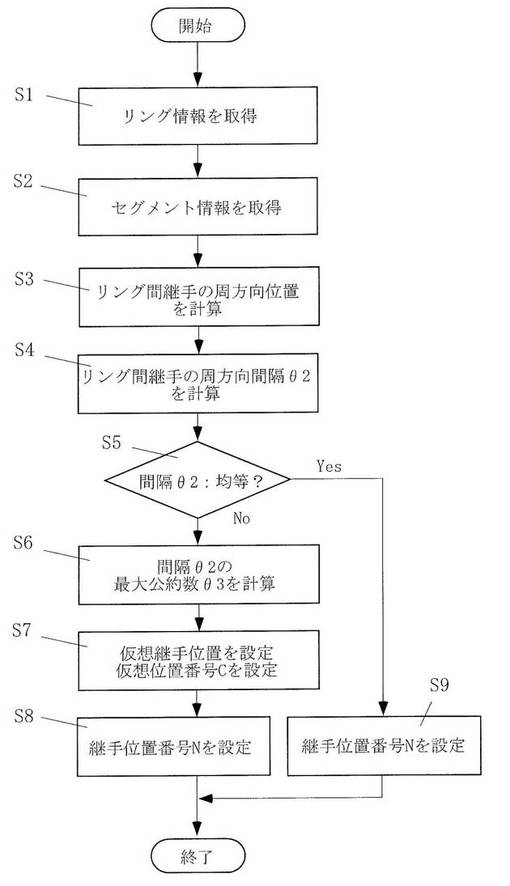
図5は、本発明によるセグメント組立方法の第1フロー図である。この図は、リング間継手の継手位置番号Nを設定する方法を示しており、S1〜S9の各ステップ(工程)からなる。
【0041】
S1では、リング情報を取得する。リング情報には、不均等分割セグメントSの種類、幅、形状、及びリング間継手B1〜B17の周方向位置、などが含まれる。
S2では、セグメント情報を取得する。セグメント情報には、不均等分割セグメントSの分割数、分割角度、及び仮想組立角度、キーセグメントKのボルト数、リング間継手本数、などが含まれる。
【0042】
S3では、これから組み立てるリング(「現リング」)のリング間継手9の周方向位置B1〜B17を計算する。リング間継手9の周方向位置B1〜B17は、リング情報から求めることができる。
例えば、図3において、リング間継手位置B1は頂部から0度、リング間継手位置B2は11.25度、リング間継手位置B3は33.75度である。
【0043】
S4では、リング間継手9の周方向間隔θ2を計算する。例えば、図3において、リング間継手B1−B2の周方向間隔θ2は11.25度、リング間継手位置B2−B3の周方向間隔θ2は22.5度、リング間継手位置B3−B4の周方向間隔θ2は22.5度である。
【0044】
S5では、リング間継手9の周方向間隔θ2が均等か否かを判断する。S5で均等(Yes)の場合、S9において、継手位置番号Nをリング間継手9の位置番号B(=1〜17)に設定して終了する。
【0045】
S5で均等でない(No)の場合、S6でリング間継手9の周方向間隔θ2の最大公約数θ3を算出する。
ここで、最大公約数θ3の最小単位は、任意であり、例えば、0.01度を単位として設定する。
例えば、図3の例において、リング間継手9のリング間継手間隔θ2が周方向角度で11.25度と22.5度のみからなる場合、その最大公約数θ3は11.25度となる。
【0046】
S7では、最大公約数θ3から仮想リング間継手C1〜C32を設定し、各仮想リング間継手C1〜C32に仮想リング間継手番号C(=1〜32)を設定する。
仮想リング間継手C1〜C32は、上述した最大公約数θ3を周方向ピッチとする位置である。なお、図3に示すように、仮想リング間継手C1〜C32は、リング間継手9の周方向位置B1〜B17を含むように設定するのがよい。
また、仮想リング間継手番号C(=1〜32)は、図3に示すように、相対的位置として仮に頂部から図で右回りに順に設定された順番である。
【0047】
S8では、継手位置番号Nを仮想リング間継手20の仮想リング間継手番号C(=1〜32)に設定して終了する。
【0048】
以下、キーセグメントKの周方向位置を「K位置」と呼ぶ。K位置は、上述した仮想リング間継手20の仮想リング間継手番号C(=1〜32)で指定することができる。
【0049】
図6は、本発明によるセグメント組立方法の第2フロー図である。この図は、各ピースセグメントPの組立スケジュールを設定する方法を示しており、S11〜S16の各ステップ(工程)からなる。
図6の各ステップは、第1フロー図(図5)の方法が終了した後に行うのがよい。
【0050】
S11では、キーセグメントKの位置する周方向位置(K位置)を第1フロー図(図5)で設定した継手位置番号Nで設定する。この継手位置番号Nは、仮想リング間継手20の仮想リング間継手番号C(=1〜32)又はリング間継手9の位置番号B(1〜17)である。
なお、S11において、継手位置番号Nと同時に任意の調整角度θ4を入力してもよい。調整角度θ4は、好ましくは上述した最大公約数θ3より小さい角度である。
【0051】
S12では、リング情報、セグメント情報、及び順序決定条件から、各ピースセグメントPの組立順序、すなわちピース番号P1〜P8の順序を決定する。
【0052】
S13では、継手位置番号NからK位置の位置する組立オフセット角θ1を計算する。
例えば、図3の例において、S11で継手位置番号Nとして4を入力し、調整角度θ4が0(なし)である場合、組立オフセット角θ1は、(N−1)×最大公約数θ3+θ4=3×11.25度=33.75度である。
【0053】
図4は、不均等分割セグメントSを図3から組立オフセット角θ1(=33.75度)だけ旋回させた状態であり、オペレータが意図するセグメントの組立状態を示している。
【0054】
図6のS14では、各ピースセグメントPの実組立角度を計算する。
この実組立角度は、例えば、各ピースセグメントPの中心線の周方向角度であり、各ピースセグメントPの分割角度と仮想組立角度、キーセグメントKの周方向位置、組立オフセット角θ1から計算することができる。
【0055】
S15では、各ピースセグメントPの旋回寄せ方向を計算する。この旋回寄せ方向は、上述した順序決定条件から計算される。旋回寄せ方向は、例えば、旋回なし、右回り(時計回り)、左回り(反時計回り)である。
【0056】
S16では、出力装置18により、組立スケジュール、すなわち組立順序、組立角度、旋回寄せ方向を出力して終了する。
上述したエレクタ装置7は、この組立スケジュールに基づき各ピースセグメントPを組み立てる。
【0057】
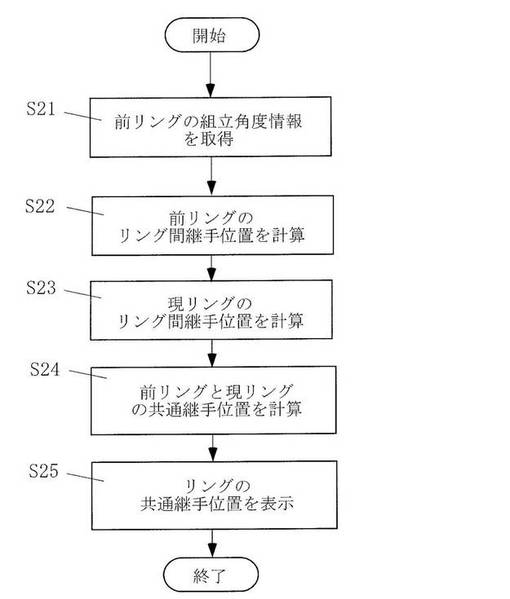
図7は、本発明によるセグメント組立方法の第3フロー図である。この図は、前リングと現リングで共通するリング間継手9の位置を算出する方法を示しており、S21〜S25の各ステップ(工程)からなる。
図7の各ステップは、第2フロー図(図6)の方法が終了した後に行うのがよい。
【0058】
S21では、直前に組み立てたリング(「前リング」)の組立角度情報を取得する。この組立角度情報は、記憶装置12に記憶された前リングのリング情報、セグメント情報、キーセグメントKの位置する周方向位置(K位置)、各ピースセグメントPの組立角度(組立位置)等である。
【0059】
S22では、S21で取得したデータから前リングのリング間継手位置9を計算する。
【0060】
S23では、第2フロー図(図6)の方法で取得したデータから現リングのリング間継手位置9を計算する。
S24では、前リングと現リングで共通する共通継手位置を算出する。
S25では、共通継手位置を表示して第3フロー図の方法を終了する。
【0061】
S25で得られた共通継手位置が予め計画した位置と一致していれば「正常」であり、組立順序に基づき各ピースセグメントPを組み立てることができる。
共通継手位置が予め計画した位置と不一致又は不足する場合には、「エラー」を表示し、組立スケジュールを再検討することが好ましい。
【0062】
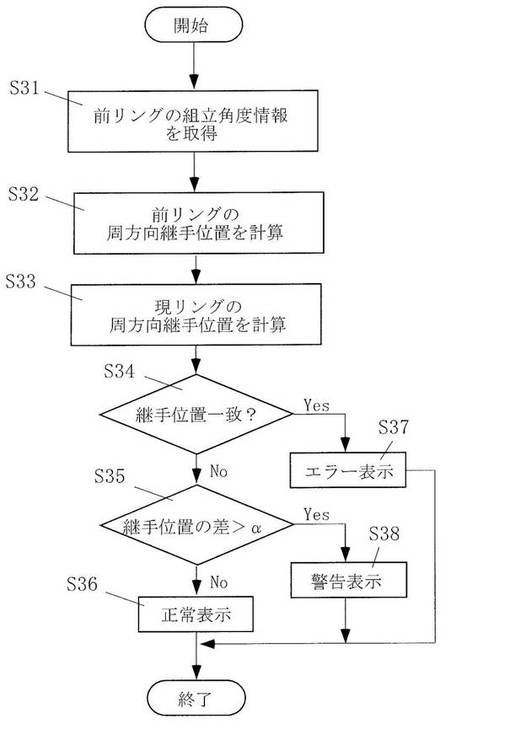
図8は、本発明によるセグメント組立方法の第4フロー図である。この図は、前リングと現リングで共通する周方向継手の位置を算出する方法を示しており、S31〜S38の各ステップ(工程)からなる。
図8の各ステップは、第2フロー図(図6)の方法が終了した後に行うのがよい。なお、図8の各ステップは、第3フロー図(図7)の方法とは並行して行うことができる。
【0063】
S31では、直前に組み立てた前リングの組立角度情報を取得する。この組立角度情報は、記憶装置12に記憶された前リングのリング情報、セグメント情報、キーセグメントKの位置する周方向位置(K位置)、各ピースセグメントPの組立角度(組立位置)等である。
なお、第3フロー図(図7)の方法の実行後に、図8の各ステップを実行する場合は、S31を省略することができる。
【0064】
S32では、S31(又はS21)で取得したデータから前リングの周方向継手位置を計算する。
S33では、キーセグメントKの周方向位置と各ピースセグメントPの実組立角度とから、組立後の現リングにおける周方向継手の位置を計算する。
【0065】
S34では、前リングと現リングの周方向継手位置が一致するか否かを判断する。周方向継手位置が一致する(Yes)の場合は、強度が低下する「芋組み」であり、S37でエラーを表示し、図8の方法を終了する。この場合は、現リングの組立スケジュールを再検討する必要がある。
【0066】
S34で周方向継手位置が一致しない(No)の場合は、S35で周方向継手位置の差が所定の許容角度α内であるか否かを判断する。許容角度αは、例えば+/−5度であり、予め任意に設定することができる。
【0067】
S35で差が許容角度αを超える(Yes)の場合は、強度が低下する「芋組み」の可能性があり、S38で警告を表示し、図8の方法を終了する。この場合は、組立スケジュールを再検討することが好ましい。
【0068】
S35で差が許容角度αを超えない(No)の場合は、「正常」であり、S36で正常を表示し、図8の方法を終了する。
【0069】
上述した本発明の方法及び装置によれば、演算装置16によりリング間継手9の周方向間隔θ2の最大公約数θ3を周方向ピッチとする仮想リング間継手C1〜C32を設定し、各仮想リング間継手C1〜C32に仮想リング間継手番号C(=1〜32)を設定するので、入力装置14によりキーセグメントKの周方向位置を仮想リング間継手番号C(=1〜32)により指定することができる。
従って、不均等分割セグメントSであっても、セグメント種類に依らず、キーセグメントKの位置を仮想のリング間継手番号C(=1〜32)により指定して、各ピースセグメントPの組立角度を自動設定することができる。
【0070】
また、キーセグメントKの周方向位置と、これに対するリング間継手9の周方向位置とから、組立後の現リングにおけるリング間継手9の周方向位置を計算し、直前に組み立てた前リングと現リングとで共通するリング間継手9の周方向位置を算出することにより、不均等分割セグメントSであっても、セグメント種類に依らず、前リングと現リングを連結するリング間継手9の位置を正確にチェックすることができる。
【0071】
また、キーセグメントSの周方向位置と各ピースセグメントPの実組立角度とから、組立後の現リングにおける周方向継手位置22を計算し、直前に組み立てた前リングと現リングで共通する周方向継手位置22を算出することにより、不均等分割セグメントSであっても、セグメント種類に依らず、前リングと現リングの周方向継手位置22が重なる芋組みの有無を正確にチェックすることができる。
【0072】
なお、本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々の変更を加え得ることは勿論である。
【符号の説明】
【0073】
1 シールド掘削機、2 本体、3 カッタヘッド、
4 シールドジャッキ、5 フレーム、6 搬送装置、
6a 台車、6b クレーン、6c コンベヤ、
7 エレクタ装置、7a 旋回リング、
7b 軸方向移動部、7c 把持装置、7d 半径方向移動部、
8 ガイド部材、9 リング間継手、
10 セグメント組立装置、
12 記憶装置、14 入力装置、
16 演算装置、18 出力装置、
20 仮想リング間継手、22 周方向継手位置
【技術分野】
【0001】
本発明は、シールド掘進機により掘削されたトンネルの内周壁に沿って環状に組み立てられる不均等分割セグメントの組立装置及び組立方法に関する。
【背景技術】
【0002】
シールド掘進機は、カッタヘッド、エレクタ装置、シールドジャッキなどを備える。カッタヘッドは、シールド掘削機本体の前部に設けられ、駆動モータによって回転駆動され、これにより、トンネルを掘削する。エレクタ装置は、トンネルの内周壁に沿ってセグメントを環状に組み付ける動作を行う。シールドジャッキは、シールド掘削機本体の周方向に複数配置され、組み付けられたセグメントを後方に押し付けることで、セグメントから押し付け反力を受け、これにより、シールド掘削機本体を前進させる。
【0003】
上述したシールド掘削機は、例えば特許文献1に開示され、セグメントの組立装置は、例えば特許文献2に開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3081328号公報、「土圧系シールド機械の自動運転制御方法」
【特許文献2】特開2001−193399号公報、「セグメントの組立位置決め装置及び方法」
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述したシールド掘削機において、環状のセグメントは、周方向に複数の分割片(以下、「ピースセグメント」又は「Pセグメント」と呼ぶ)に分割されており、そのうち1つがトンネルの円形を保持するためにクサビ状の形状をしており、軸挿入により最後に組み立てられ、「キーセグメント」(又は「Kセグメント」)と呼ばれる。
また、以下の説明において、環状に組み立てられたセグメントを単に「リング」と呼ぶ。
【0006】
従来、セグメントの組立において、キーセグメントの位置は、トンネルの施工上の要求から予め設定され、オペレータによりリング間継手番号で指定される。
「リング間継手番号」とは、既設のリング(以下、「前リング」と呼ぶ)と組立中のリング(以下、「現リング」と呼ぶ)をトンネルの軸方向に連結する継手(「リング間継手」)の番号である。このリング間継手番号は、従来、リング間継手が周方向に均等配置されていることを前提としており、例えば、切羽に対して右回転(時計回り)にトンネルの頂点からN(=1,2,3・・・Nは整数)で指定される。
【0007】
一方、近年、各セグメントの形状が不均一な「不均等分割セグメント」が用いられている。この不均等分割セグメントの場合、環状に組み立てられたリングにおけるリング間継手の周方向位置が不均等であり、キーセグメントの位置をリング間継手番号により指定することができない問題点があった。
【0008】
そのため、不均等分割セグメントの場合、従来、各リングのリング間継手位置を個々に計算し、既設の前リングと照合させて、各セグメントの組立の可否を判断していた。
しかし、不均等分割セグメントの場合、要求されるセグメント種類が多彩であるため、その組立パターンは膨大かつ複雑であり、個々の計算時に人為的ミスが発生しやすく、これに基づくセグメント組立に支障がでるおそれがあった。
【0009】
例えば、前リングと現リングのリング間継手位置は一致する必要があるが、個々に計算した場合、人為的ミスによりリング間継手位置の一部が不一致となるおそれがあった。
また、前リングと現リングの周方向継手位置が重なる(「芋組み」と呼ぶ)と、芋組み部の強度が低下するので、これを回避する必要があるが、個々に計算した場合、人為的ミスにより周方向継手位置の一部が一致するおそれがあった。
【0010】
本発明はかかる問題点を解決するために創案されたものである。すなわち、本発明の目的は、不均等分割セグメントであっても、キーセグメントの位置をリング間継手番号により指定して、各セグメントの組立角度を自動設定することができ、かつ前リングと現リングを連結するリング間継手の位置を正確にチェックすることができ、前リングと現リングの周方向継手位置が重なる芋組みの有無を正確にチェックすることができる不均等分割セグメントの組立装置及び組立方法を提供することにある。
【課題を解決するための手段】
【0011】
本発明によれば、トンネルの内周壁に沿って環状に組み立てる不均等分割セグメントの組立方法であって、
前記不均等分割セグメントは、周方向に分割された複数のピースセグメントからなり、かつそのうち最後に組み付けられるピースセグメントがキーセグメントであり、
(A)前記ピースセグメントを環状に組み立てたリングにおけるリング間継手の周方向位置から、該リング間継手の周方向間隔の最大公約数を算出し、
(B)前記最大公約数を周方向ピッチとする仮想リング間継手を設定し、
(C)前記各仮想リング間継手に仮想リング間継手番号を設定し、
(D)前記キーセグメントの周方向位置を前記仮想リング間継手番号により指定して、ピースセグメントを組み立てる、ことを特徴とする不均等分割セグメントの組立方法が提供される。
【0012】
また本発明によれば、トンネルの内周壁に沿って環状に組み立てる不均等分割セグメントの組立装置であって、
前記不均等分割セグメントは、周方向に分割された複数のピースセグメントからなり、かつそのうち最後に組み付けられるピースセグメントがキーセグメントであり、
前記ピースセグメントを環状に組み立てたリングにおけるリング間継手の周方向位置を記憶する記憶装置と、
前記リング間継手の周方向間隔の最大公約数を算出し、
前記最大公約数を周方向ピッチとする仮想リング間継手を設定し、
前記各仮想リング間継手に仮想リング間継手番号を設定する演算装置と、
前記キーセグメントの周方向位置を前記仮想リング間継手番号により指定する入力装置と、
ピースセグメントを組み立てるエレクタ装置とを備える、ことを特徴とする不均等分割セグメントの組立装置が提供される。
【発明の効果】
【0013】
上記本発明の方法及び装置によれば、演算装置によりリング間継手の周方向間隔の最大公約数を周方向ピッチとする仮想リング間継手を設定し、各仮想リング間継手に仮想リング間継手番号を設定するので、入力装置によりキーセグメントの周方向位置を前記仮想リング間継手番号により指定することができる。
従って、不均等分割セグメントであっても、セグメント種類に依らず、キーセグメントの位置を仮想のリング間継手番号により指定して、各ピースセグメントの組立角度を自動設定することができる。
【0014】
また、キーセグメントの周方向位置と、これに対するリング間継手の周方向位置とから、組立後の現リングにおけるリング間継手の周方向位置を計算し、直前に組み立てた前リングと現リングとで共通するリング間継手の周方向位置を算出することにより、不均等分割セグメントであっても、セグメント種類に依らず、前リングと現リングを連結するリング間継手の位置を正確にチェックすることができる。
【0015】
また、キーセグメントの周方向位置と各ピースセグメントの実組立角度とから、組立後の現リングにおける周方向継手位置を計算し、直前に組み立てた前リングと現リングで共通する周方向継手位置を算出することにより、不均等分割セグメントであっても、セグメント種類に依らず、前リングと現リングの周方向継手位置が重なる芋組みの有無を正確にチェックすることができる。
【図面の簡単な説明】
【0016】
【図1】本発明の装置を備えたシールド掘削機を示す概略断面図である。
【図2】本発明によるセグメント組立装置の構成図である。
【図3】不均等分割セグメントの例を示す正面図である。
【図4】図3の不均等分割セグメントを旋回させたセグメントの組立状態を示す図である。
【図5】本発明によるセグメント組立方法の第1フロー図である。
【図6】本発明によるセグメント組立方法の第2フロー図である。
【図7】本発明によるセグメント組立方法の第3フロー図である。
【図8】本発明によるセグメント組立方法の第4フロー図である。
【発明を実施するための形態】
【0017】
以下、本発明の好ましい実施例を図面を参照して説明する。なお、各図において共通する部分には同一の符号を付し、重複した説明を省略する。
【0018】
図1は、本発明の装置を備えたシールド掘削機を示す概略断面図である。
この図において、本発明によるセグメント組立装置10は、エレクタ装置7を制御するために設置されている。セグメント組立装置10の設置位置は、この図ではエレクタ装置7の後方に示しているが、エレクタ装置7に近接して設置してもよい。
【0019】
シールド掘削機1は、シールド掘削機の本体2、カッタヘッド3、シールドジャッキ4を有する。シールド掘削機の本体2は、筒状に形成されている。カッタヘッド3は、本体2の前方(図の左側)において、本体2に固定されたフレーム5に回転可能に取り付けられトンネル切削する。切削した土砂はスクリューコンベア(図示せず)等で後方側に排出される。シールドジャッキ4は、フレーム5に取り付けられている。シールドジャッキ4は、その伸長ストロークにより、組み付けられた複数のピースセグメントPからなるセグメントSを後方側に押し、その反力で本体2を前方側に移動させる。なお、エレクタ装置7によるピースセグメントの組付時には、シールドジャッキ4は、エレクタ装置7とピースセグメントに干渉しないように収縮する。
【0020】
シールド掘削機1は、搬送装置6を有する。搬送装置6は、台車6a、ホイスト式のクレーン6b、およびピースセグメントのコンベヤ6cを備える。台車6aは、シールド掘削機1に掘削されたトンネル内を、その後方側(図の右側)からその前方側(図の左側)へピースセグメントPを載せてトンネル軸方向(図の左右方向)に走行し、これによりピースセグメントPをトンネルの前方側へ搬送する。クレーン6bは、トンネル前方側へ走行してきた台車6a上のピースセグメントPを持ち上げて、トンネル前方側へ水平移動し、コンベヤ6cへ当該ピースセグメントPを吊り降ろす。コンベヤ6cは、ローラコンベヤで構成され、クレーン6bによりローラコンベヤ6cに吊り降ろされたピースセグメントPをトンネル前方側へ移動させる。
【0021】
ピースセグメントPは、予め設定された組付順序の順にクレーン6bによりローラコンベヤ6cに吊り降ろされて、組付順序が先のピースセグメントPほどローラコンベヤ6cにおけるトンネル前方側に位置させられる。エレクタ装置7は、ローラコンベヤ6cにおける最もトンネル前方側にあるピースセグメントPから順に、ピースセグメントPを把持しその組付位置へ組み付ける。このようにして、予め設定された組付順序の順にピースセグメントPが組み付けられる。
【0022】
エレクタ装置7は、複数のピースセグメントPを環状のセグメントSに組み立てる。エレクタ装置7は、旋回リング7a、半径方向移動部7d、軸方向移動部7b、および把持装置7cを有する。
旋回リング7aは、図示しない駆動装置によりトンネルの中心軸周りに旋回駆動されるようにフレーム5に支持される。半径方向移動部7dは、トンネルの中心に対する半径方向に往復移動可能である。軸方向移動部7bは、半径方向移動部7dに固定され水平方向に延びるガイド部材8に沿って、図示しない駆動装置により往復移動させられるようにガイド部材8に支持される。把持装置7cは、軸方向移動部7bに取り付けられる。
【0023】
この構成で、エレクタ装置7は次のように動作する。把持装置7cが、最もトンネル前方側にあるピースセグメントのコンベヤ6c上のピースセグメントPを把持し、軸方向移動部7bの移動によりシールド掘削機1のカッタヘッド3があるトンネルの前方側(図の左側)へ移動し、半径方向移動部7dの移動によりピースセグメントをトンネル中心に引き寄せ、次いで、旋回リング7aが中心軸C周りに旋回して把持装置7cを旋回方向に位置決めし、その後、半径方向移動部7dの移動により、前記半径方向に関して組付位置まで外側に移動して、軸方向移動部7bの移動により、把持装置7cが直前に組み立てたセグメントSへ向けて軸方向(例えば、トンネルの軸方向)に移動させて把持しているピースセグメントPのボルト(図示せず)をセグメントのボルト孔(図示せず)へ挿入することができる。これにより、ピースセグメントPを、上述の組付位置に完全に組み付けることができる。
【0024】
図2は、本発明によるセグメント組立装置の構成図である。
この図に示すように、本発明のセグメント組立装置10は、記憶装置12、入力装置14、演算装置16、及び出力装置18を備える。
【0025】
記憶装置12は、コンピュータの記憶装置(例えば、ROM、RAM、ハードディスク、メモリーカード)であり、種々の不均等分割セグメントSのリング情報とセグメント情報を記憶する。
リング情報とセグメント情報の詳細は後述する。
【0026】
入力装置14は、例えばコンピュータのキーボードであり、リング情報、セグメント情報、及び順序決定条件を記憶装置12に入力する。
なお、入力装置14は、キーボード以外の入力装置(例えばカードリーダ、別の記憶装置)であってもよい。
【0027】
本発明は、セグメントSが不均等分割セグメントである場合を対象としている。「不均等分割セグメント」とは、ピースセグメントPの形状が不均一なセグメントを意味する。
不均等分割セグメントSは、周方向に分割された複数のピースセグメントPからなり、そのうち最後に組み付けられるピースセグメントPがキーセグメントKである。
なお、本発明は、不均等分割セグメントSに限定されず、ピースセグメントPの形状が均一な均等分割セグメントにも適用することができる。
【0028】
順序決定条件は、例えば、最初に組み立てるピースセグメントのピース番号(「第1ピース番号」という)、2番目に組み立てるピースセグメントを決定する「組立パターン」、及び組立順序の優先順位を示す「優先基準」を含む。
【0029】
演算装置16は、コンピュータの演算装置であり、上述したリング情報、セグメント情報、順序決定条件から、各ピースセグメントPの実組立角度、組立順序、及び旋回寄せ方向を決定する。
【0030】
出力装置18は、決定した実組立角度、組立順序、及び旋回寄せ方向をエレクタ装置7に出力する。なお、この出力を例えばCRT、プリンタ等の出力装置に出力してもよい。
【0031】
エレクタ装置7は、決定した実組立角度、組立順序、及び旋回寄せ方向に基づきピースセグメントPを組み立てる。
【0032】
図3は、不均等分割セグメントSの例を示す正面図である。この図は、図1において、坑口側(右側)から切羽側(左側)を見た図に相当する。
なおこの図では、キーセグメントKが頂部に位置するように、仮に定められているが、周方向位置は任意である。
【0033】
ピースセグメントPは、トンネルの周方向に間隔を隔てて配置されたリング間継手9でトンネルの軸方向にボルトとナット等で連結される。このリング間継手9の周方向位置は、この例では不均等であり、セグメントの種類毎に任意に設定されている。
【0034】
図3において、リング間継手9は、相対的位置として仮に頂部から図で右回りに順にB1〜B17の位置に設定されている。以下、リング間継手9の位置番号をB=1〜17とする。ここで、Bは正の整数である。
【0035】
不均等分割セグメントSを構成するピースセグメントPの分割角度と仮想組立角度は、セグメントの種類毎に予め決められている。
ここで、「分割角度」とは、各ピースセグメントPが占める周方向角度である。また、「仮想組立角度」とは、例えば図3のように仮に定めた場合の、各ピースセグメントPの周方向中心が位置する周方向角度である。
【0036】
図3の例において、不均等分割セグメントSを構成するピースセグメントPのピース番号を、キーセグメントKから図で右回りに、P1〜P8とする。
以下、特に区別しない限り、キーセグメントKを含めてピースセグメントPと呼び、個々のピースセグメントはピース番号P1〜P8で区別する。
【0037】
図3において、C1〜C32は仮想リング間継手20(後述する)であり、相対的位置として仮に頂部から図で右回りに順にC1〜C32の位置に設定されている。以下、仮想リング間継手20の位置番号をC=1〜32とする。ここで、Cは正の整数である。
仮想リング間継手20の詳細は、後述する。
【0038】
また、この図において、22はピースセグメントを周方向に連結する周方向継手位置である。
【0039】
図4は、図3の不均等分割セグメントSを組立オフセット角θ1だけ回転させた状態を示している。
組立オフセット角θ1の説明は、後述する。
【0040】
図5は、本発明によるセグメント組立方法の第1フロー図である。この図は、リング間継手の継手位置番号Nを設定する方法を示しており、S1〜S9の各ステップ(工程)からなる。
【0041】
S1では、リング情報を取得する。リング情報には、不均等分割セグメントSの種類、幅、形状、及びリング間継手B1〜B17の周方向位置、などが含まれる。
S2では、セグメント情報を取得する。セグメント情報には、不均等分割セグメントSの分割数、分割角度、及び仮想組立角度、キーセグメントKのボルト数、リング間継手本数、などが含まれる。
【0042】
S3では、これから組み立てるリング(「現リング」)のリング間継手9の周方向位置B1〜B17を計算する。リング間継手9の周方向位置B1〜B17は、リング情報から求めることができる。
例えば、図3において、リング間継手位置B1は頂部から0度、リング間継手位置B2は11.25度、リング間継手位置B3は33.75度である。
【0043】
S4では、リング間継手9の周方向間隔θ2を計算する。例えば、図3において、リング間継手B1−B2の周方向間隔θ2は11.25度、リング間継手位置B2−B3の周方向間隔θ2は22.5度、リング間継手位置B3−B4の周方向間隔θ2は22.5度である。
【0044】
S5では、リング間継手9の周方向間隔θ2が均等か否かを判断する。S5で均等(Yes)の場合、S9において、継手位置番号Nをリング間継手9の位置番号B(=1〜17)に設定して終了する。
【0045】
S5で均等でない(No)の場合、S6でリング間継手9の周方向間隔θ2の最大公約数θ3を算出する。
ここで、最大公約数θ3の最小単位は、任意であり、例えば、0.01度を単位として設定する。
例えば、図3の例において、リング間継手9のリング間継手間隔θ2が周方向角度で11.25度と22.5度のみからなる場合、その最大公約数θ3は11.25度となる。
【0046】
S7では、最大公約数θ3から仮想リング間継手C1〜C32を設定し、各仮想リング間継手C1〜C32に仮想リング間継手番号C(=1〜32)を設定する。
仮想リング間継手C1〜C32は、上述した最大公約数θ3を周方向ピッチとする位置である。なお、図3に示すように、仮想リング間継手C1〜C32は、リング間継手9の周方向位置B1〜B17を含むように設定するのがよい。
また、仮想リング間継手番号C(=1〜32)は、図3に示すように、相対的位置として仮に頂部から図で右回りに順に設定された順番である。
【0047】
S8では、継手位置番号Nを仮想リング間継手20の仮想リング間継手番号C(=1〜32)に設定して終了する。
【0048】
以下、キーセグメントKの周方向位置を「K位置」と呼ぶ。K位置は、上述した仮想リング間継手20の仮想リング間継手番号C(=1〜32)で指定することができる。
【0049】
図6は、本発明によるセグメント組立方法の第2フロー図である。この図は、各ピースセグメントPの組立スケジュールを設定する方法を示しており、S11〜S16の各ステップ(工程)からなる。
図6の各ステップは、第1フロー図(図5)の方法が終了した後に行うのがよい。
【0050】
S11では、キーセグメントKの位置する周方向位置(K位置)を第1フロー図(図5)で設定した継手位置番号Nで設定する。この継手位置番号Nは、仮想リング間継手20の仮想リング間継手番号C(=1〜32)又はリング間継手9の位置番号B(1〜17)である。
なお、S11において、継手位置番号Nと同時に任意の調整角度θ4を入力してもよい。調整角度θ4は、好ましくは上述した最大公約数θ3より小さい角度である。
【0051】
S12では、リング情報、セグメント情報、及び順序決定条件から、各ピースセグメントPの組立順序、すなわちピース番号P1〜P8の順序を決定する。
【0052】
S13では、継手位置番号NからK位置の位置する組立オフセット角θ1を計算する。
例えば、図3の例において、S11で継手位置番号Nとして4を入力し、調整角度θ4が0(なし)である場合、組立オフセット角θ1は、(N−1)×最大公約数θ3+θ4=3×11.25度=33.75度である。
【0053】
図4は、不均等分割セグメントSを図3から組立オフセット角θ1(=33.75度)だけ旋回させた状態であり、オペレータが意図するセグメントの組立状態を示している。
【0054】
図6のS14では、各ピースセグメントPの実組立角度を計算する。
この実組立角度は、例えば、各ピースセグメントPの中心線の周方向角度であり、各ピースセグメントPの分割角度と仮想組立角度、キーセグメントKの周方向位置、組立オフセット角θ1から計算することができる。
【0055】
S15では、各ピースセグメントPの旋回寄せ方向を計算する。この旋回寄せ方向は、上述した順序決定条件から計算される。旋回寄せ方向は、例えば、旋回なし、右回り(時計回り)、左回り(反時計回り)である。
【0056】
S16では、出力装置18により、組立スケジュール、すなわち組立順序、組立角度、旋回寄せ方向を出力して終了する。
上述したエレクタ装置7は、この組立スケジュールに基づき各ピースセグメントPを組み立てる。
【0057】
図7は、本発明によるセグメント組立方法の第3フロー図である。この図は、前リングと現リングで共通するリング間継手9の位置を算出する方法を示しており、S21〜S25の各ステップ(工程)からなる。
図7の各ステップは、第2フロー図(図6)の方法が終了した後に行うのがよい。
【0058】
S21では、直前に組み立てたリング(「前リング」)の組立角度情報を取得する。この組立角度情報は、記憶装置12に記憶された前リングのリング情報、セグメント情報、キーセグメントKの位置する周方向位置(K位置)、各ピースセグメントPの組立角度(組立位置)等である。
【0059】
S22では、S21で取得したデータから前リングのリング間継手位置9を計算する。
【0060】
S23では、第2フロー図(図6)の方法で取得したデータから現リングのリング間継手位置9を計算する。
S24では、前リングと現リングで共通する共通継手位置を算出する。
S25では、共通継手位置を表示して第3フロー図の方法を終了する。
【0061】
S25で得られた共通継手位置が予め計画した位置と一致していれば「正常」であり、組立順序に基づき各ピースセグメントPを組み立てることができる。
共通継手位置が予め計画した位置と不一致又は不足する場合には、「エラー」を表示し、組立スケジュールを再検討することが好ましい。
【0062】
図8は、本発明によるセグメント組立方法の第4フロー図である。この図は、前リングと現リングで共通する周方向継手の位置を算出する方法を示しており、S31〜S38の各ステップ(工程)からなる。
図8の各ステップは、第2フロー図(図6)の方法が終了した後に行うのがよい。なお、図8の各ステップは、第3フロー図(図7)の方法とは並行して行うことができる。
【0063】
S31では、直前に組み立てた前リングの組立角度情報を取得する。この組立角度情報は、記憶装置12に記憶された前リングのリング情報、セグメント情報、キーセグメントKの位置する周方向位置(K位置)、各ピースセグメントPの組立角度(組立位置)等である。
なお、第3フロー図(図7)の方法の実行後に、図8の各ステップを実行する場合は、S31を省略することができる。
【0064】
S32では、S31(又はS21)で取得したデータから前リングの周方向継手位置を計算する。
S33では、キーセグメントKの周方向位置と各ピースセグメントPの実組立角度とから、組立後の現リングにおける周方向継手の位置を計算する。
【0065】
S34では、前リングと現リングの周方向継手位置が一致するか否かを判断する。周方向継手位置が一致する(Yes)の場合は、強度が低下する「芋組み」であり、S37でエラーを表示し、図8の方法を終了する。この場合は、現リングの組立スケジュールを再検討する必要がある。
【0066】
S34で周方向継手位置が一致しない(No)の場合は、S35で周方向継手位置の差が所定の許容角度α内であるか否かを判断する。許容角度αは、例えば+/−5度であり、予め任意に設定することができる。
【0067】
S35で差が許容角度αを超える(Yes)の場合は、強度が低下する「芋組み」の可能性があり、S38で警告を表示し、図8の方法を終了する。この場合は、組立スケジュールを再検討することが好ましい。
【0068】
S35で差が許容角度αを超えない(No)の場合は、「正常」であり、S36で正常を表示し、図8の方法を終了する。
【0069】
上述した本発明の方法及び装置によれば、演算装置16によりリング間継手9の周方向間隔θ2の最大公約数θ3を周方向ピッチとする仮想リング間継手C1〜C32を設定し、各仮想リング間継手C1〜C32に仮想リング間継手番号C(=1〜32)を設定するので、入力装置14によりキーセグメントKの周方向位置を仮想リング間継手番号C(=1〜32)により指定することができる。
従って、不均等分割セグメントSであっても、セグメント種類に依らず、キーセグメントKの位置を仮想のリング間継手番号C(=1〜32)により指定して、各ピースセグメントPの組立角度を自動設定することができる。
【0070】
また、キーセグメントKの周方向位置と、これに対するリング間継手9の周方向位置とから、組立後の現リングにおけるリング間継手9の周方向位置を計算し、直前に組み立てた前リングと現リングとで共通するリング間継手9の周方向位置を算出することにより、不均等分割セグメントSであっても、セグメント種類に依らず、前リングと現リングを連結するリング間継手9の位置を正確にチェックすることができる。
【0071】
また、キーセグメントSの周方向位置と各ピースセグメントPの実組立角度とから、組立後の現リングにおける周方向継手位置22を計算し、直前に組み立てた前リングと現リングで共通する周方向継手位置22を算出することにより、不均等分割セグメントSであっても、セグメント種類に依らず、前リングと現リングの周方向継手位置22が重なる芋組みの有無を正確にチェックすることができる。
【0072】
なお、本発明は上述した実施の形態に限定されず、本発明の要旨を逸脱しない範囲で種々の変更を加え得ることは勿論である。
【符号の説明】
【0073】
1 シールド掘削機、2 本体、3 カッタヘッド、
4 シールドジャッキ、5 フレーム、6 搬送装置、
6a 台車、6b クレーン、6c コンベヤ、
7 エレクタ装置、7a 旋回リング、
7b 軸方向移動部、7c 把持装置、7d 半径方向移動部、
8 ガイド部材、9 リング間継手、
10 セグメント組立装置、
12 記憶装置、14 入力装置、
16 演算装置、18 出力装置、
20 仮想リング間継手、22 周方向継手位置
【特許請求の範囲】
【請求項1】
トンネルの内周壁に沿って環状に組み立てる不均等分割セグメントの組立方法であって、
前記不均等分割セグメントは、周方向に分割された複数のピースセグメントからなり、かつそのうち最後に組み付けられるピースセグメントがキーセグメントであり、
(A)前記ピースセグメントを環状に組み立てたリングにおけるリング間継手の周方向位置から、該リング間継手の周方向間隔の最大公約数を算出し、
(B)前記最大公約数を周方向ピッチとする仮想リング間継手を設定し、
(C)前記各仮想リング間継手に仮想リング間継手番号を設定し、
(D)前記キーセグメントの周方向位置を前記仮想リング間継手番号により指定して、ピースセグメントを組み立てる、ことを特徴とする不均等分割セグメントの組立方法。
【請求項2】
各ピースセグメントの分割角度と仮想組立角度を含むセグメントデータを記憶し、
前記仮想リング間継手番号から、キーセグメントの周方向位置を決定し、
前記セグメントデータから各ピースセグメントの実組立角度、組立順序、及び旋回寄せ方向を決定し、
前記組立順序に基づき各ピースセグメントを組み立てる、ことを特徴とする請求項1に記載の不均等分割セグメントの組立方法。
【請求項3】
キーセグメントの周方向位置と、これに対するリング間継手の周方向位置とから、組立後の現リングにおけるリング間継手の周方向位置を計算し、
直前に組み立てた前リングと現リングとで共通するリング間継手の周方向位置を算出する、ことを特徴とする請求項2に記載の不均等分割セグメントの組立方法。
【請求項4】
キーセグメントの周方向位置と各ピースセグメントの実組立角度とから、組立後の現リングにおける周方向継手の位置を計算し、
直前に組み立てた前リングと現リングで共通する周方向継手の位置を算出する、ことを特徴とする請求項2に記載の不均等分割セグメントの組立方法。
【請求項5】
トンネルの内周壁に沿って環状に組み立てる不均等分割セグメントの組立装置であって、
前記不均等分割セグメントは、周方向に分割された複数のピースセグメントからなり、かつそのうち最後に組み付けられるピースセグメントがキーセグメントであり、
前記ピースセグメントを環状に組み立てたリングにおけるリング間継手の周方向位置を記憶する記憶装置と、
前記リング間継手の周方向間隔の最大公約数を算出し、
前記最大公約数を周方向ピッチとする仮想リング間継手を設定し、
前記各仮想リング間継手に仮想リング間継手番号を設定する演算装置と、
前記キーセグメントの周方向位置を前記仮想リング間継手番号により指定する入力装置と、
ピースセグメントを組み立てるエレクタ装置とを備える、ことを特徴とする不均等分割セグメントの組立装置。
【請求項6】
前記記憶装置は、各ピースセグメントの分割角度と仮想組立角度を含むセグメントデータを記憶し、
前記演算装置は、前記仮想リング間継手番号から、キーセグメントの周方向位置を決定し、
前記セグメントデータから各ピースセグメントの実組立角度、組立順序、及び旋回寄せ方向を決定し、
前記エレクタ装置は、前記組立順序に基づき各ピースセグメントを組み立てる、ことを特徴とする請求項5に記載の不均等分割セグメントの組立装置。
【請求項1】
トンネルの内周壁に沿って環状に組み立てる不均等分割セグメントの組立方法であって、
前記不均等分割セグメントは、周方向に分割された複数のピースセグメントからなり、かつそのうち最後に組み付けられるピースセグメントがキーセグメントであり、
(A)前記ピースセグメントを環状に組み立てたリングにおけるリング間継手の周方向位置から、該リング間継手の周方向間隔の最大公約数を算出し、
(B)前記最大公約数を周方向ピッチとする仮想リング間継手を設定し、
(C)前記各仮想リング間継手に仮想リング間継手番号を設定し、
(D)前記キーセグメントの周方向位置を前記仮想リング間継手番号により指定して、ピースセグメントを組み立てる、ことを特徴とする不均等分割セグメントの組立方法。
【請求項2】
各ピースセグメントの分割角度と仮想組立角度を含むセグメントデータを記憶し、
前記仮想リング間継手番号から、キーセグメントの周方向位置を決定し、
前記セグメントデータから各ピースセグメントの実組立角度、組立順序、及び旋回寄せ方向を決定し、
前記組立順序に基づき各ピースセグメントを組み立てる、ことを特徴とする請求項1に記載の不均等分割セグメントの組立方法。
【請求項3】
キーセグメントの周方向位置と、これに対するリング間継手の周方向位置とから、組立後の現リングにおけるリング間継手の周方向位置を計算し、
直前に組み立てた前リングと現リングとで共通するリング間継手の周方向位置を算出する、ことを特徴とする請求項2に記載の不均等分割セグメントの組立方法。
【請求項4】
キーセグメントの周方向位置と各ピースセグメントの実組立角度とから、組立後の現リングにおける周方向継手の位置を計算し、
直前に組み立てた前リングと現リングで共通する周方向継手の位置を算出する、ことを特徴とする請求項2に記載の不均等分割セグメントの組立方法。
【請求項5】
トンネルの内周壁に沿って環状に組み立てる不均等分割セグメントの組立装置であって、
前記不均等分割セグメントは、周方向に分割された複数のピースセグメントからなり、かつそのうち最後に組み付けられるピースセグメントがキーセグメントであり、
前記ピースセグメントを環状に組み立てたリングにおけるリング間継手の周方向位置を記憶する記憶装置と、
前記リング間継手の周方向間隔の最大公約数を算出し、
前記最大公約数を周方向ピッチとする仮想リング間継手を設定し、
前記各仮想リング間継手に仮想リング間継手番号を設定する演算装置と、
前記キーセグメントの周方向位置を前記仮想リング間継手番号により指定する入力装置と、
ピースセグメントを組み立てるエレクタ装置とを備える、ことを特徴とする不均等分割セグメントの組立装置。
【請求項6】
前記記憶装置は、各ピースセグメントの分割角度と仮想組立角度を含むセグメントデータを記憶し、
前記演算装置は、前記仮想リング間継手番号から、キーセグメントの周方向位置を決定し、
前記セグメントデータから各ピースセグメントの実組立角度、組立順序、及び旋回寄せ方向を決定し、
前記エレクタ装置は、前記組立順序に基づき各ピースセグメントを組み立てる、ことを特徴とする請求項5に記載の不均等分割セグメントの組立装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−144932(P2012−144932A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−5444(P2011−5444)
【出願日】平成23年1月14日(2011.1.14)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(509355142)ジャパントンネルシステムズ株式会社 (3)
【Fターム(参考)】
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願日】平成23年1月14日(2011.1.14)
【出願人】(000000099)株式会社IHI (5,014)
【出願人】(509355142)ジャパントンネルシステムズ株式会社 (3)
【Fターム(参考)】
[ Back to top ]