
他動運動機器
【課題】運動中に左右の足に作用する力を検出するとともに、使用者に左右の力のかかり方を認識させて左右の偏りのない運動を行うように意識付ける。
【解決手段】他動運動機器は、左右の足をそれぞれ載せる一対の足置台211、212を備え、駆動源を備えた駆動手段30で各足置台211,212を変位させることにより、使用者に他動的に運動を行わせる。各足置台211,212は、それぞれ足置台211,212に作用する力をそれぞれ検出する力検出手段511,512を備える。力検出手段511,512が検出した力から評価手段52において力評価量が求められ、求められた力評価量は表示手段53に表示される。
【解決手段】他動運動機器は、左右の足をそれぞれ載せる一対の足置台211、212を備え、駆動源を備えた駆動手段30で各足置台211,212を変位させることにより、使用者に他動的に運動を行わせる。各足置台211,212は、それぞれ足置台211,212に作用する力をそれぞれ検出する力検出手段511,512を備える。力検出手段511,512が検出した力から評価手段52において力評価量が求められ、求められた力評価量は表示手段53に表示される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、使用者の左右の足を載せる足置台を駆動源からの駆動力で変位させることにより、使用者に他動的に運動を行わせる他動運動機器に関するものである。
【背景技術】
【0002】
従来から、使用者の身体の少なくとも一部を他動的に変位させることにより、使用者が自発的に筋力を発揮することなく、使用者に他動的に運動を行わせるようにした他動運動機器が提案されている。この種の他動運動機器としては、使用者が立位で使用するとともに、使用者の左右の足を載せる足置台を駆動源からの駆動力で変位させる構成が知られている(たとえば、特許文献1参照)。特許文献1に記載された構成では、使用者の脚部に他動的に筋刺激を与えて使用者の筋活動を誘発することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−154879号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、多くの人の運動能力は左右で異なっていることが多く、そのため筋力も左右で異なっていることが多い。また、生活場面では左右の手足のうち筋力の強い側を使用する頻度が高くなるから、生活習慣により左右の筋力差が増大することも多い。左右の筋力差が大きくなれば、場合によっては体幹に歪みが生じる可能性もある。
【0005】
また、種々の身体的障害(骨折、神経障害、血行障害など)や脳障害などにより左右の身体能力が不均衡になる場合があり、この種の障害に対する回復訓練(リハビリテーション)の際には、左右の身体能力の均衡を回復させる訓練が含まれることもある。
【0006】
このような使用者の左右の偏りを検出する技術として、板状の台の上に載った状態で足に作用する荷重を静的に計測する技術が知られている。ただし、この種の技術は、静止した状態において使用者の左右の偏りを検出しているだけであるから、使用者の運動に伴って左右の身体能力の不均衡を是正するためには用いることができない。
【0007】
本発明は、運動中に左右の足に作用する力を検出するとともに、使用者に左右の力のかかり方を認識させることにより、左右の偏りのない運動を行うように意識付けることを可能にした他動運動機器を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、上記目的を達成するために、左右の足をそれぞれ載せる一対の足置台と、駆動源を備え各足置台を変位させる駆動手段と、各足置台に作用する力をそれぞれ検出する力検出手段と、力検出手段が検出した力から求められる力評価量を表示する表示手段とを備える構成を採用している。
【0009】
力評価量は各足置台にそれぞれ作用する力であって、表示手段は力評価量をグラフにして表示するのが望ましい。
【0010】
また、力評価量は両足置台に作用する力の総量に対する各足置台にそれぞれ作用する力の割合であって、表示手段は、力評価量をグラフにして表示してもよい。
【0011】
あるいはまた、力評価量は各足置台にそれぞれ作用する力の差であって、表示手段は、力評価量をグラフにして表示してもよい。
【0012】
力評価量は両足置台に作用する力の総量に対する各足置台にそれぞれ作用する力の割合であって、表示手段は、前記総量を表す図形を力評価量に応じた割合で分割するグラフにして力評価量を表示する構成を採用することができる。
【0013】
表示手段は、グラフとして左右方向のバーの長さで力評価量を表すバーグラフを用いることができる。
【0014】
表示手段は、力評価量について、左側の成分を左向きに表示し、右側の成分を右向きに表示してもよい。
【0015】
また、力検出手段により検出された左右の力の差が規定の範囲内か否かを報知する報知手段を備えていてもよい。
【0016】
また、力検出手段により検出された左右の力の分布を評価するバランス評価手段を備え、バランス評価手段による評価結果を前記表示手段に表示する構成を採用してもよい。
【0017】
力検出手段により検出された力の履歴を記憶する履歴記憶手段を備え、表示手段は履歴記憶手段に記憶された履歴を表示するようにしてもよい。
【0018】
力検出手段により検出される力をあらかじめ設定した目標値と比較する比較手段を備え、表示手段は、比較手段による比較結果を表示する機能を備えていてもよい。
【0019】
この場合、比較手段に与える目標値を設定する目標値設定手段を備えるのが望ましい。
【0020】
また、表示手段は、足置台の位置情報を表示してもよい。
【発明の効果】
【0021】
本発明の構成によれば、運動中に左右の足に作用する力を検出し、力から求められる力評価量を表示することによって、使用者に左右の力のかかり方を認識させることができるから、左右の偏りのない運動を行うように意識付けることができる。その結果、使用者には左右の不均衡を是正するように運動を行わせることが可能になる。
【図面の簡単な説明】
【0022】
【図1】実施形態を示すブロック図である。
【図2】同上を示す要部分解斜視図である。
【図3】同上を示す透視した平面図である。
【図4】同上の表示例を示す動作説明図である。
【図5】同上の表示例を示す動作説明図である。
【図6】同上の表示例を示す動作説明図である。
【図7】同上の表示例を示す動作説明図である。
【図8】同上の表示例を示す動作説明図である。
【図9】同上の表示例を示す動作説明図である。
【図10】同上の表示例を示す動作説明図である。
【発明を実施するための形態】
【0023】
本実施形態は、図2および図3に示す構成を備える。図示例は、床上に載置して使用する構成を示しているが、床に埋め込んで使用する構成を採用してもよい。
【0024】
ハウジング10は、床上に載置されるベース板11と、ベース板11の上方に配置される上板12とを結合して形成される。
【0025】
図示するベース板11および上板12は外周形状が長方形状であるが、ベース板11および上板12の外周形状についてはとくに制限はない。以下では、説明を簡単にするために、ベース板11を床上に載置した状態でハウジング10の上面が床面と平行になるものとする。したがって、図2および図3における上下が使用時の上下になる。図示例は、ハウジング10を床に固定しておらず適宜の位置で使用できる場合を示しているが、ハウジング10を床に固定して定位置で使用する構成を採用してもよい。
【0026】
図示例では、ハウジング10は直方体状に形成されているが、内部に収納用の空間を備えるものであればハウジング10の外観形状として円筒状、多角筒状などを採用することもできる。なお、床に埋め込んで使用する構成では、ハウジング10として上板12を除く部材を軸組のみとした構造を採用することが可能である。
【0027】
図示する他動運動機器は、使用者が立位で使用することを想定しており、使用者が左右の足をそれぞれ載せる一対の足置台211,212を備える。足置台211,212は、各足置台211,212を変位させる駆動手段30とともに、ハウジング10に配置される。以下では、図2および図3に示す矢印Xの向きを前方として説明する。
【0028】
上板12には、各足置台211,212をそれぞれ露出させる矩形状に開口した2個の開口窓131,132が貫設される。各開口窓131,132は、前後方向の寸法が左右方向の寸法よりも大きい矩形状に形成される。また、各開口窓131,132の長手方向に沿った中心線は、ハウジング10の前後方向に対して交差する。
【0029】
左の開口窓131の長手方向に沿った中心線は前端部が後端部よりも左側に位置し、右の開口窓132の長手方向に沿った中心線は前端部が後端部よりも右側に位置する。すなわち、両開口窓131,132の長手方向に沿った中心線間の距離は、ハウジング10の前端側で後端側よりも大きくなる。
【0030】
開口窓131,132の長手方向がベース板11の前後方向に対してなす角度は、たとえば5〜15度の範囲で適宜に設定される。角度は、左側の開口窓131については後端を中心にして左回りの角度を採用し、右側の開口窓132については後端を中心にして右回りの角度を採用する。
【0031】
各足置台211,212は、それぞれ各開口窓131,132の長手方向に沿ってスライド可能である足置カバー22と、使用者が足を載せるための足置板23とにより構成される。図3には右側の足置カバー22および足置板23のみを記載している。各足置板23には、足置板23の下面周部を囲むカバー体241,242が取り付けられる。
【0032】
各足置カバー22は角筒状に形成され、内部には軸受板25が取り付けられる。軸受板25は各開口窓131,132の幅方向に沿った軸体26を支持し、軸体26は足置板23の下面に設けた軸受(図示せず)に通される。したがって、足置板23は足置カバー22に対して軸体26の回りで揺動可能になっている。
【0033】
足置板23に取り付けられたカバー体241,242は、各足置カバー22の内側に挿入される。したがって、足置板23が軸体26の回りで揺動して足置板23の前端部および後端部が上下に移動するのに伴ってカバー体241,242が上下に移動し、足置カバー22と足置板23との間に隙間が生じるのをカバー体241,242が防止する。
【0034】
足置カバー22の上端縁の周部には全周に亘ってフランジ部221が形成されている。一方、上板12の下面には、開口窓131,132の長手方向に沿った周部において、レール部材(図示せず)が取り付けられている。レール部材は、開口窓131,132の内向きに開口するレール溝(図示せず)を形成する。
【0035】
足置カバー22におけるフランジ部221の一部がレール溝に挿入されることにより、足置カバー22のハウジング10に対する移動範囲が制限される。フランジ部221とレール溝との間には余裕があり、フランジ部221がレール溝に挿入されている範囲内において足置カバー22が前後左右に移動する。また、フランジ部221は、足置カバー22の移動範囲において開口窓131,132の開口縁と足置板23との間に隙間を形成しない寸法に形成されている。
【0036】
足置カバー22の下面には台車41が取り付けられる。台車41の外側面には各2個ずつの車輪42が取り付けられる。ベース板11の上面には各足置台211,212に対してそれぞれ2本ずつのレール43が固定されており、レール43の上面において車輪42が転動するように、レール43上に台車41が載置される。また、レール43の上面には車輪42がレール43から脱落するのを防止するために、車輪42の側面に当接する脱輪防止板44が固定される。
【0037】
ところで、上述したように、左右の開口窓131,132は、長手方向に沿った中心線間の距離が前端側で後端側よりも大きくなるように形成してある。すなわち、開口窓131,132の中心線は、ハウジング10の前後方向に対して所定の角度をなしている。レール43も開口窓131,132の中心線と同様に、延長方向がハウジング10の前後方向に対して所定の角度をなしている。ここに、レール43は、延長方向がハウジング10の前後方向に対してなす角度が、開口窓131,132の中心線がハウジング10の前後方向に対してなす角度よりも大きくなるように配置されている。
【0038】
たとえば、開口窓131,132の中心線がハウジング10の前後方向に対してなす角度を10度とすれば、レール43の延長方向がハウジング10の前後方向に対してなす角度は45度などに設定される。
【0039】
上述の構成によって、足置台211,212はレール43の長手方向に沿って往復移動することが可能になる。このとき、足置台211,212の移動経路は、台車41と車輪42とレール43と脱輪防止板44とにより拘束される。ここに、レール43の延長方向と開口窓131,132の長手方向とが異なっているから、足置カバー22および足置板23は開口窓131,132の長手方向に交差する方向に移動する。
【0040】
すなわち、足置台211,212の長手方向に足の長手方向を一致させると、足置台211,212は、足の長手方向とは異なる方向に移動する。これは、足置台211,212をレール43の延長方向に移動させたときに、使用者の膝に大きな剪断力が作用するのを防止するためである。
【0041】
ところで、左右の各足置台211,212を変位させる駆動手段30は、駆動力を発生させる駆動源31を備える。駆動源31からの駆動力は、各足置台211,212にそれぞれ伝達されるように系統分離部32において2系統に分離される。さらに、系統分離部32で分離された各系統の駆動力は、往復駆動部33を介して左右の各台車41に伝達され、台車41をレール43に沿って往復移動させる。
【0042】
駆動手段30について、さらに具体的に説明する。駆動源31には回転モータ(以下、単にモータと略称し、符号31を用いる)を採用しており、モータ31の出力軸311には系統分離部32が連結される。
【0043】
系統分離部32は、モータ31の出力軸311に連結されたウォーム321と、ウォーム321に噛合する2個のウォームホイール322とを備える。ウォーム321および2個のウォームホイール322は、ベース板11に固定されるギアボックス34に収納される。ギアボックス34は、上面に開口を有するギアケース341と、ギアケース341の開口面に覆着される蓋板342とにより形成される。ギアケース341と蓋板342との間にはウォーム321の長手方向の両端部を回転可能に支持する一対の軸受323が取り付けられる。
【0044】
ウォームホイール322には、ギアケース341と蓋板342とに保持される回転軸35が挿通され、ウォームホイール322の回転に伴って回転軸35が回転するように、ウォームホイール322と回転軸35とを結合してある。
【0045】
モータ31は、ギアケース341に設けた口受部343とベース板11に固定した口受板111とに載置され、ギアケース341に覆着される蓋板342と口受け板111に結合される押さえ板112とによりベース板11に固定される。
【0046】
往復駆動部33は、回転軸35に一端部が一体に結合されるクランク板36と、クランク板36にクランク軸37を介して結合されたクランクロッド38とを備える。クランク板36は回転軸35とともに回転するように回転軸35に結合される。すなわち、ウォームホイール322は回転軸35に結合され、回転軸35にはクランク板36が結合されるから、ウォームホイール322とクランク板36とは一体に回転する。
【0047】
クランク軸37の一端部はクランク板36の他端部に固定され、クランク軸37の他端部はクランクロッド38の一端部に保持された軸受381に保持される。つまり、クランクロッド38の一端部はクランク板36に対して回動自在に結合される。クランクロッド38の他端部は台車41に対して軸体382を用いて結合される。つまり、クランクロッド38の他端部は台車41に対して回動自在に結合される。
【0048】
上述の構成から明らかなように、クランクロッド38は、ウォームホイール322の回転力を台車41の直進往復移動に変換する変換機構として機能する。また、クランクロッド38はウォームホイール322ごとに設けられ、台車41は各足置台211,212において個別に設けられている。それゆえ、各クランクロッド38は、各ウォームホイール322の回転力をそれぞれ足置台211,212の往復移動に変換する。
【0049】
台車41は上述のように移動経路が拘束されているから、ウォームホイール322の回転に伴って台車41がレール43の長手方向に沿って往復移動する。つまり、モータ31の回転がウォーム321およびウォームホイール322を介してクランク板36に伝達され、さらに、クランク板36に結合されたクランクロッド38により台車41がレール43に沿った直線上で往復移動を行うのである。その結果、台車41に結合されている足置カバー22がレール43に沿って往復移動する。つまり、両足置台211,212がレール43の長手方向において往復移動する。
【0050】
ここに、ウォーム321と2個のウォームホイール322とにより駆動力を2系統に分離し、各系統ごとに足置台211,212の駆動力として用いるから、両足置台211,212は駆動手段30により関連付けて駆動される。各ウォームホイール322はウォーム321に噛合する位置を180度異ならせてある。そのため、左側の足置台211が移動範囲の後端に位置するときには、右側の足置台212は移動範囲の前端に位置する。左側の足置台211の移動範囲における後端は左側の足置台211の移動範囲の右端であって、右側の足置台212の移動範囲における前端は右側の足置台212の移動範囲の右端であるから、左右方向においては、両足置台211,212は同じ向きに移動することになる。
【0051】
ところで、各足置台211,212にそれぞれ設けた足置板23は足置カバー22に対して軸体26の周りで回動可能であるから、足置板23の前端部と後端部との高さ位置を変化させることが可能になっている。つまり、足置板23の上に置いた足の爪先と踵との高さ位置を変化させることにより、足関節の底屈と背屈とが可能になっている。
【0052】
ここで、軸体26の周りでの足置板23の回動をレール43の延長方向に沿った往復移動に連動させるために、ベース板11には、足置板23の移動経路に沿って少なくとも一部に傾斜面を有したガイド面(図示せず)が形成され、足置板23の下面にはガイド面に当接する倣い突部231が設けられる。倣い突部231の先端部は、ガイド面に対する摩擦係数が小さくなるように材料および形状を選択しておけばよいが、本実施形態では、ガイド面の上で転動するローラ232を倣い突部231の先端部に設けている。
【0053】
上述のように、ガイド面に当接する倣い突部231を設けていることにより、モータ31の回転に伴って各足置台211,212が往復移動を行うと、倣い突部231がガイド面に沿って移動し、足置板23が軸体26の周りで回動する。すなわち、足置板23のベース板11に対する角度が変化し、結果的に足関節の底屈および背屈が行われる。
【0054】
ガイド面の形状についてはとくに制限はないが、本実施形態では、足置台211,212の1往復の間に足関節の底屈と背屈とを1回ずつ行うようにガイド面を形成する。したがって、ガイド面としては、全長に亘ってベース板11の上面に対して一定角度で傾斜する形状か、中間部において傾斜の向きが変化する形状(V字状、U字状、逆V字状、逆U字状など)を採用することが望ましい。
【0055】
上述した他動運動機器は、基本的には立位で使用する。この場合、足置台211,212が停止している初期位置において、左右の足をそれぞれ足置台211,212に載せて立ち、駆動手段30の運転を開始させる。足置台211,212の長手方向は前後方向(矢印Xの向き)に対して、10度程度の角度をなすように配置され、足置台211,212の上に立ったときに、使用者の脚部に捻れを生じることがなく、自然な立ち位置になるようにしてある。
【0056】
初期位置では、両足置台211,212は前後方向における同じ位置に停止する。すなわち、初期位置では両足置台211,212が左右方向の一直線上に並ぶ。したがって、初期位置で使用者が両足をそれぞれ左右の足置台211,212の上に載ると、使用者の重心から鉛直方向に下ろした直線は両足置台211,212の間でほぼ中央を通ることになる。
【0057】
モータ31の回転を開始すると、両足置台211,212はそれぞれ前後方向の位置を変化させるとともに、前後方向の位置変化に伴って左右方向の位置も変化させる。このとき、両足置台211,212はレール43に沿った一直線上を往復移動し、各足置台211,212は足の前後方向(長手方向)とは異なる方向に移動する。たとえば、ハウジング10の前後方向に対して45度をなす方向に移動する。
【0058】
また、足置台211,212がレール43に沿って往復移動すると同時に、足置板23が軸体26の周りに回動する。たとえば、足置板23が前方に移動する際に、倣い突起25が上方に移動するようにガイド面を形成しておけば、足置台211,212の前端位置において足関節を背屈させ、足置台211,212の後端位置において足関節を底屈させることができる。軸体26の位置は足裏において踵付近に設定し、底屈と背屈との角度はベース板11の上面に対してそれぞれ10度程度に設定する。
【0059】
なお、足置台211,212の前後の位置と底屈および背屈との関係は上述の例とは逆にすることが可能である。また、ベース板11の上面に対する底屈および背屈の角度は異ならせてもよい。これらの動作はガイド面の形状を適宜に設定することにより、容易に実現することができる。
【0060】
図2、図3に示す構成では、使用者の上体を支持する構成を設けていないが、使用者が把持する手摺を設けてもよい。手摺はハウジング10に一体に設けるほか、装置を使用する場所において造営物側に設けるようにしてもよい。手摺を設けておけば手摺によって使用者は身体を支えることができるからバランス機能が衰えている使用者でも利用しやすくなる。また、立位で使用することが基本であるが、障害の回復訓練などに用いる目的であって、立位が困難な場合には座席を設けて着座姿勢で利用してもよい。
【0061】
上述の構成例では、足置台211,212の移動軌跡は前方に開放されたV字状になるが、逆に、足置台211,212の左右方向の距離を前端側よりも後端側で広くなるようにして逆V字状の移動軌跡を採用してもよい。あるいは、足置台211,212の前端位置と後端位置とで距離が変化しない動作や、移動軌跡の左端と右端との位置が前後方向において変化しない動作を採用してもよい。
【0062】
上述した他動運動機器を用いて運動を行えば、足関節の底屈と背屈とが行われるから、ふくらはぎの筋群(腓腹筋等)への筋刺激が増加し、ふくらはぎの筋群の伸縮に伴って脚部からの静脈環流が促進される。このことは、全身の血行の向上につながる。また、足関節が回動することにより使用者は前後方向のバランスを維持する筋群が刺激され、とくに前後方向において転倒しないように姿勢を維持する神経系の反射によって、脚部だけではなく、腰背部の筋群の筋活動も誘発されることになる。
【0063】
モータ31の回転速度などの制御は、制御手段50(図1参照)からの指示により行われる。制御手段50は、もっとも単純にはモータ31への電源の入切を行う構成でよい。また、モータ31が直流モータであれば、モータ31に通電する電流をスイッチング素子によって断続させるとともに、スイッチングの際のオンデューティを変化させることにより、モータ31に供給する平均電力を調節するように制御手段50を構成してもよい。さらには、使用者の身体状態に併せて、使用時間を設定したり、モータ31の回転速度を経過時間に応じて変化させるように制御したりする機能を制御手段50に設けてもよい。
【0064】
ところで、本実施形態は、使用者に左右の偏りがない運動を行わせるために、運動中における左右の偏りの程度を利用者に提示する構成を備えている。ここでの左右の偏りは、使用者の左右の筋力差による偏りのほか、使用者の身体の左右の傾きによる偏りも含まれる。この種の偏りは、使用者の足に作用する力を検出することにより、評価することができる。
【0065】
そこで、上述した足置台211,212には、それぞれ力検出手段511,512(図1参照)を配置してある。力検出手段511,512は、各足置板23に作用する下向き荷重(重力により作用する下向きの力)を検出する構成のほか、前後、上下、左右の3方向の荷重と各方向の軸周りのトルクとから選択される1ないし複数の力を検出する構成を採用することができる。力検出手段511,512は、ロードセル、加速度センサ、ジャイロセンサ、トルクセンサなどから選択して用いる。また、力検出手段511,512を配置する部位は、各足置台211,212にそれぞれ設けた各足置板23のほか、足置カバー22、軸受板25、軸体26などに配置することも可能である。
【0066】
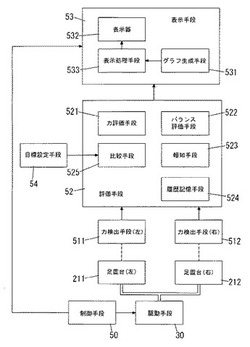
以下では、力検出手段511、512として、左右の各足置板23に作用する下向き荷重をそれぞれ検出するロードセルを各足置板23に配置した構成を想定する。図1に示すように、各力検出手段511,512により検出された左右の各足置台211,212に作用する荷重(各足置板23に作用する下向き荷重)は評価手段52に入力される。
【0067】
評価手段52は、後述するように、力検出手段511,512が検出した力(荷重)に基づいて使用者の左右の均衡を評価するための力評価量を求めるとともに、左右の均衡を評価し、力評価量および評価結果を表示手段53に引き渡す。表示手段53では、評価手段52から引き渡された力評価量および評価結果を使用者に表示する。
【0068】
評価手段52および表示手段53は、マイコンあるいはFPGAのようにプログラムに従って動作するプロセッサおよびメモリを主構成とする。ただし、評価手段52および表示手段53には外部装置を接続するインターフェースを設けることが望ましい。
【0069】
評価手段52に外部装置としてパーソナルコンピュータを接続すれば、後述する目標設定手段54としてパーソナルコンピュータを用いることができる。また、表示手段53に外部装置としてパーソナルコンピュータやテレビジョン受像機を接続すれば、後述する表示器532としてパーソナルコンピュータやテレビジョン受像機のモニタ装置を用いることができる。
【0070】
評価手段52は、各力検出手段511,512が検出した力(荷重)を用いて以下に説明する力評価量を求める力評価手段521を備える。力評価量には以下の3種類があり、力評価手段521としては、3種類の力評価量のいずれかを選択して求める構成と、3種類の力評価量のうちの1種類のみを求める構成とのいずれかを採用する。力評価量は、運動中に各力検出手段511,512が検出する荷重のデータを一定周期で収集し、所定期間において収集した荷重のデータから左側と右側との荷重を算出する。
【0071】
たとえば、左右の荷重を求めるために荷重のデータを収集する期間を、左右の足置台211,212が1回ずつ往復する期間とし、この期間内に各力検出手段511,512から得られた荷重のデータを左右の荷重として用いる。力検出手段511,512は、足置台211,212の1回の往復の間に荷重のデータを複数回検出してもよい。すなわち、足置台211,212の1往復の間に、荷重のデータのサンプリングを複数回行ってもよい。この場合、1往復毎に荷重のデータの平均値あるいは中央値のような代表値を求め、この代表値を各足置台211,212に関する荷重として用いる。
【0072】
荷重のデータを収集する期間と、荷重のデータを収集する周期とは適宜に設定することができる。ただし、運動中の使用者に左右の荷重の均衡の程度を視覚化して示すために、荷重のデータを収集する期間は比較的短くすることが望ましく(0.数秒以内)、荷重のデータを収集する周期は各足置台211,212の往復の周期の整数分の1であることが望ましい。
(1)各力検出手段511,512により検出される下向き荷重。すなわち、各足置台211,212にそれぞれ作用する力。
(2)両力検出手段511,512により検出される下向き荷重の総量に対する各力検出手段511,512により検出される下向き荷重の割合。すなわち、両足置台211,212に作用する力の総量に対する各足置台211,212に作用する力の割合。左右のそれぞれの割合は、(左側の荷重/荷重の総量)と(右側の荷重/荷重の総量)とになる。
(3)両力検出手段511,512により検出される下向き荷重の差。すなわち、各足置台211,212に作用する力の差。この値は、(右側の荷重−左側の荷重)または(左側の荷重−右側の荷重)として求められる。
(4)両力検出手段511,512により検出される下向き荷重の総量に対する、両力検出手段511,512により検出される下向き荷重の差の割合。すなわち、(右側の荷重−左側の荷重)/荷重の総量
なお、両力検出手段511,512により検出される下向き荷重の総量は、各力検出手段511,512により検出される下向き荷重の和を用いる。ただし、使用者の質量(体重)が既知であれば、使用者の質量を総量に代えて用いてもよい。
【0073】
力評価手段521により求められた力評価量は表示手段53に引き渡される。表示手段53は、力評価量をグラフにして表示する。すなわち、表示手段53は、力評価量を表すグラフを生成するグラフ生成手段531と、グラフを含む表示内容を画面上に表示する表示器532と、表示器532への表示内容を生成する表示処理手段533とを備える。表示器532は、運動中の使用者が視認できるように配置される。
【0074】
表示器532としては、専用のモニタ装置を用いるほか、テレビジョン受像機やパーソナルコンピュータに付属している既存のモニタ装置を流用することもできる。この場合、表示処理手段533には、既存のモニタ装置に画像を出力するためのインターフェースを設ける。
【0075】
専用のモニタ装置を用いる場合には、運動中に使用者が把持する手摺を設けておき、手摺の上部にモニタ装置を取り付ければよい。手摺は、ハウジング10と一体でも別体でもよい。手摺の具体的形状としては、運動中の使用者の前方においてハウジング10から立てた支柱の上端部に、自転車のハンドルと類似した両手で把持する構成を採用することができる。あるいはまた、運動中の使用者の前方と両側方との三方を囲む柵状の手摺をハウジング10に設けてもよい。
【0076】
表示器532の表示内容は、左右の足置台211,212に作用する荷重の均衡の程度を使用者にわかりやすく提示するように生成される。したがって、グラフ生成手段531は、表示器532の画面上において、左右の足置台211,212に作用する荷重を、画面上の左右に対応付けたグラフを生成する。グラフ生成手段531が生成するグラフとしては、左右方向のバーの長さによって力評価量を表すバーグラフ61,62,63(図4参照)と、縦方向のバーの長さによって力評価量を表すバーグラフ64(図5(A)参照)と、円の中心角によって力評価量を表す円グラフ65(図5(B)参照)とのいずれかを用いる。
【0077】
左右方向のバーの長さにより力評価量を表すバーグラフでは、上述した(1)〜(3)のすべての力評価量を表現することができる。
【0078】
たとえば、図4(A)に示すように、縦方向の基準線610を設定したバーグラフ61を用いると、各足置台211,212にそれぞれ作用する荷重と、各足置台211,212にそれぞれ作用する荷重の総量(総荷重)に対する割合とのいずれかを表すことができる。このバーグラフ61では、バー611,612を帯状の図形で表しており、力評価量の大きさが基準線610に対するバー611,612の長さで表される。すなわち、力評価量の左側の成分が基準線610から左向きに表され、力評価量の右側の成分が基準線610から右向きに表される。ただし、両バー611,612は一直線上に配置され、1本のバーを形成している。
【0079】
バーグラフ61を用いると、各足置台211,212にそれぞれ作用する荷重に応じてバー611,612の長さが変化する。また、バーグラフ61を用いて各足置台211,212にそれぞれ作用する荷重を力評価量として表す場合、荷重の総量に応じて両バー611,612の合計の長さが変化する。一方、バーグラフ61を用いて荷重の総量に対する割合を力評価量として表す場合には、両バー611,612を合計した長さは一定長に保たれる。
【0080】
図4(A)に示すバーグラフ61を用いると、使用者の左右の荷重が均衡しているか否かの目安を、基準線610に対する左右のバー611,612の長さが等しいか否かによって視覚的に認識することが可能になる。また、力評価量として左右の荷重を用いる場合は、荷重の総量に応じて両バー611,612の合計の長さが変化するから、使用者が足置台211,212を踏み込む力を視覚化することができる。一方、力評価量として荷重の総量に対する割合を用いる場合は、使用者の質量(体重)にかかわりなく、使用者の左右の荷重の大きさを視覚化することができる。
【0081】
各足置台211,212に作用する荷重の差を表す場合は、図4(B)に示すように、縦方向の基準線620を設定したバーグラフ62を用い、荷重の差を基準線620からのバー621の長さに対応付ければよい。ここでは、荷重の差である力評価量を、右側の足置台212に作用する荷重から左側の足置台211に作用する荷重を減算した値と定義する。この場合、右側の荷重が左側の荷重よりも大きいときに力評価量の符号は正になり、左側の荷重が右側の荷重よりも大きいときに力評価量の符号は負になる。
【0082】
そこで、図4(B)に示すバーグラフ62では、力評価量が0である位置を基準線620の位置に対応付け、符号が正の場合には、図に実線で示すように、基準線620の右側にバー621を表示し、符号が負の場合には、図に破線で示すように、基準線620の左側にバー621を表示する。図4(B)に示すバーグラフ62を用いると、使用者の左右の荷重が均衡した状態に近付くほどバー621が短くなるから、左右の均衡の程度を視覚的に認識するのが容易になる。
【0083】
ところで、荷重の総量に対する割合を力評価量とする場合には、図4(C)に示すように、左右方向のバー631の両端位置を固定した一定長のバーグラフ63を用いてもよい。このバーグラフ63では、帯状の図形であるバー631を分割する位置を力評価量に応じて変化させる。すなわち、両足置台211,212にそれぞれ作用する荷重の総量(総荷重)を両バー631の長さに対応付け、総量に対する割合に応じてバー631の分割位置を変化させるのである。
【0084】
したがって、使用者が左右の足置台211,212に作用させる力が均衡していれば、分割線632の位置がバー61の中央付近に移動することになる。そのため、バー631を二等分する位置に指標633を表記しておくことが望ましい。この場合、分割線632と指標633との距離が小さいほど使用者の左右の均衡の程度が高いことを表すことになる。
【0085】
図4(A)(B)に示した各バーグラフ61,62では、基準線610,620の左側のバー611,621と右側のバー612,622とを表示する際の色を異ならせておくのが望ましい。また、図4(C)に示すバーグラフ63では、分割線632の右側と左側とで表示する色を異ならせておくのが望ましい。たとえば、右側を赤色、左側を青色などで表示すればよい。このように、左右の成分を異なる色で表すことにより、使用者の荷重が左右のどちらに偏っているかを一見して視認することが可能になる。
【0086】
力評価量を示すグラフとしては、図5(A)に示すように、縦方向の2本のバー641,642を左右に配置したバーグラフ64を用いてもよい。このバーグラフ64では、使用者の左側の荷重(左側の足置台211に作用する荷重)に相当する力評価量を左側のバー641で表し、使用者の右側の荷重に相当する力評価量を右側のバー642で表す。力評価量としては、各足置台211,212にそれぞれ作用する荷重と、荷重の総量に対する左右の各荷重の割合とのいずれかを用いる。このバーグラフ64を用いる場合には、人を示す図形643をバー641,642に重ねて表示してもよい。また、各バー641,642の色を異ならせてもよい。
【0087】
図5(B)に示すグラフは円グラフ65であって、図4(C)に示したバーグラフ63と同様に図形の分割位置に応じて力評価量を表している。また、力評価量として荷重の総量に対する左右の各荷重の割合を用いる。ただし、分割する図形は帯状ではなく、円形である点が図4(C)のバーグラフ63とは相違する。円グラフ65は、通常の円グラフと同様に、表現する量を中心角に対応付けている。
【0088】
ここでは、円の中心を通る縦方向の直線のうち円の中心から上側の部分を基準線651に用い、基準線651に対して右回りに中心角を規定している。また、円の中心を一端とする分割線652を設定し、基準線651に対して分割線652がなす角度で中心角を表している。したがって、使用者の左右の荷重が均衡して力評価量が50%となるとき、分割線652は基準線651に対して一直線上に並ぶことになる。このように、分割線652の位置を目安に用いることによって、使用者の左右の均衡の程度を視覚的に視認することが可能になる。円グラフ65を用いる場合も基準線651と分割線652とで囲まれた2領域を異なる色で表すのが望ましい。また、分割線652の左側の領域を力評価量の左側の成分に対応付け、右側の領域を力評価量の右側の成分に対応付ける。
【0089】
上述した構成では、力評価量を示すグラフを表示器532に表示することによって、使用者に力評価量を視覚的に認識させるだけであるから、左右の均衡の程度は使用者自身が認識する必要がある。以下では、左右の均衡の程度を使用者自身が認識しなくとも、表示手段53などから使用者に報知する技術について説明する。
【0090】
左右の均衡の程度を使用者に報知するために、本実施形態では、図1に示すように、評価手段52に、バランス評価手段522と報知手段523とを設けている。バランス評価手段522は、力検出手段511,512の出力をサンプリングすることにより収集した左右一対の荷重(力)のデータ(左右の力検出手段511,512により計測した荷重を対にしたデータ)を評価する。
【0091】
対になるデータの分布の評価には、対になるデータごとに差を求め、複数対のデータについて差の平均値を用いることができる。この場合、使用者の左右の荷重の偏りが少ないほど、求めた平均値は0に近付く。また、対になるデータの分布の評価には、対になるデータの総和に対して一方のデータの割合を求め、複数対のデータについて割合の平均値を用いることができる。この場合、使用者の左右の荷重の偏りが少ないほど、求めた平均値は0.5に近付く。
【0092】
バランス評価手段531は、上述のような演算により左右の荷重の分布を評価し、評価の結果を表示手段53に表示する。すなわち、対になる荷重のデータから求めた評価のための値(差の平均値、割合の平均値など)を数値として表示手段53に提示する。このような表示を行えば、使用者は左右の荷重の均衡の程度を数値によって知ることができる。また、荷重の分布を数値化することにより荷重の偏りの傾向を把握することができる。
【0093】
ところで、報知手段523は、力検出手段511,512により検出された左右の荷重の一致の程度を評価するバランス評価量を求める機能を有している。バランス評価量は、上述した左右の荷重(所定の期間おいて求めた複数個の荷重のデータの代表値)を用いて求める。具体的には、上述した力評価量を求めるための左右の荷重を用い、左右の荷重の和(荷重の総量)に対する右側あるいは左側の荷重をバランス評価量に用いることができる。
【0094】
このバランス評価量が0.5に対して規定した範囲(たとえば、±0.05)であるときは、左右の荷重がほぼ均衡していると判断することができる。したがって、報知手段523において、バランス評価量に対する範囲を規定しておき、バランス評価量が規定の範囲内であると判断するときに報知すれば、使用者は左右の荷重が均衡しているかを自身で判断する必要がなくなる。たとえば、左右の荷重が規定した範囲内になったときに、バーグラフ63の色を変化させることで報知することができる。
【0095】
たとえば、常時は力評価量の右側の成分を赤色、左側の成分を青色で表しているとして、報知する条件が成立したときに、バー631の全体を緑色で表すようにすれば、使用者は左右の荷重が均衡したことを瞬時に認識することができる。なお、表示器532を用いて報知するほか、表示器532とは別に設けた表示灯により報知したり、音による報知を行うようにしてもよい。
【0096】
また、図6に示すように、図4(C)で示したバーグラフ63を表示手段53に提示する場合、バーグラフ63には中央を示す指標633とともに、指標633から左右に一定距離だけ離れた位置に範囲を示す境界線634,635を表示する。さらに、分割線632に相当する部位にマーカ636を表示すれば、マーカ636の位置が左右の境界線634,635に挟まれた範囲内か否かによって、使用者は、左右の荷重が均衡しているか否かを直観的に知ることができる。図6(A)では左右の荷重が均衡している状態を示し、図6(B)では左右の荷重が不均衡である状態を示している。
【0097】
なお、上述の構成例では、左右の荷重の均衡の範囲を0.45〜0.55に規定しているが、この範囲は適宜に設定すればよい。たとえば、平衡感覚の低い使用者に対しては広い範囲で設定し、平衡感覚が高くなるほど狭い範囲に設定することも可能である。
【0098】
さらに、バランス評価量として荷重の総量に対する左右の一方の荷重の割合を用いているが、力評価量として左右の各荷重を用いる場合や左右の荷重差を用いる場合でも、上述したバランス評価量を用いることによって、左右の荷重が均衡しているか否かを報知することができる。上述の例では、報知手段523は、バランス評価量が規定の範囲内であるときに報知する構成としているが、バランス評価量が規定の範囲を逸脱しているときに報知する構成としてもよい。
【0099】
上述した動作では、力検出手段511,512により検出した所定期間ごとの荷重を表示手段53に表示しているが、評価手段52には荷重の変化の履歴を記憶するための履歴既往手段524を設けてもよい。履歴記憶手段524を設けている場合には、表示手段53には所定時間分ずつの力評価量の変化を表示させることができる。
【0100】
履歴記憶手段524に記憶させた履歴を表示器532に表示する例を図7に示す。図7(A)は図4(C)に示したバーグラフ63を時間経過に伴って上下に並べて表示した例である。時間軸は下から上に向かって表示されており、上下に隣接するバーグラフ63は一定時間だけ異なる時刻(t1〜t5)の力評価量を表している。
【0101】
隣接する各時刻の時間間隔は適宜に設定することができるが、ここでは左右の足置台211,212がそれぞれ1往復する時間の整数倍に設定してある。したがって、左右の均衡の程度について足置台211,212の変位の影響を除去した変化傾向を表すことができる。なお、後述するように時間間隔を短くすることにより、左右の均衡の程度について足置台211,212の変位に関連付けた変化傾向を表すことも可能である。
【0102】
履歴記憶手段524に記憶された力評価量の履歴を表示手段53に表示するにあたっては、図7(A)のようにバーグラフ63を用いるほか、図7(B)のように折れ線グラフ66を用いてもよい。図示する折れ線グラフ66では、荷重の総量に対する一方の右側の荷重の割合、あるいは右側の荷重から左側の荷重を減算した差に関する一定時間ごとの変化を表している。折れ線グラフ66を用いることによっても、バーグラフ63と同様に、左右の均衡の程度の変化傾向を示すことができる。
【0103】
図7(A)(B)のように力評価量の変化の履歴を示す際には、最新の状態を示すためのマーカ661,662を表示してもよい。マーカ661,662には、たとえば黄色の円を用いればよい。
【0104】
ところで、図2および図3に示した装置は、主として左右の荷重を均衡させることを目的にする運動以外に、平衡感覚をより強化することを目的にした運動にも用いることができる。両方の目的に用いるために、本実施形態では、図1に示すように、評価手段52に比較手段525を設けてあり、さらに比較手段525に目標値を与える目標設定手段54を設けてある。目標設定手段54は必須というわけではなく、目標値はあらかじめ比較手段525に設定しておいてもよい。
【0105】
比較手段525は、力評価量における左右の成分(力検出手段により検出される力に相当する)を目標値と比較する機能を有し、表示手段53は比較手段525による比較結果を表示する機能を有している。また、目標値は、目標設定手段5により設定することができる。目標設定手段54は、キーボードやマウスのようなコンピュータに付設した入力手段を用いるほか、専用のタッチパネルやスイッチ類を目標設定手段54に用いることが可能である。
【0106】
左右の荷重を均衡させるためにのみ運動を行う場合には、比較的狭い範囲に収まるように右側と左側との目標値が設定される。いま、図4(C)に示したバーグラフ63を表示器63に表示している場合を想定すると、目標設定手段54により設定した目標値は、図8(A)に示すように、目標値に相当する左右の境界線634,635として表示器532の画面に表示される。また、分割線632に対応する部位に円形のマーカ636が表示される。
【0107】
左右の荷重を均衡させるための運動を行う際には、境界線634,635の間隔を比較的狭く設定しておき、使用者は、両境界線634,635の間にマーカ636を入れるように身体を操作する。この場合、報知手段523と同様に、常時は力評価量の左右の成分を異なる色で表示しておき、マーカ339が両目標線の間に収まると、バー631の全体の色を左右の成分とは異なる色で表示するのが望ましい。目標値を設定可能としているから、使用者の平衡感覚の能力に応じて左右の荷重を均衡させるための運動を行うことができる。
【0108】
一方、平衡感覚の能力が高い使用者や体重移動のための運動を行う場合には、比較手段525において、境界線634,635の間にマーカ636が入ったことを検出するのではなく、境界線634,635の外側にマーカ636が出たことを検出する。また、境界線634,635の間隔が広くなるように目標値を設定する。たとえば、図8(B)のように、左側の境界線634よりもマーカ636が左側に位置するときに、バー631の色を常時に対して変化させるのである。
【0109】
この運動を行う場合には、左足と右足とのどちらの荷重が目標値を超えているかを示すために、バー631の両端部付近に、足型などの表示マーク637,638を設けてもよい。この場合、荷重が目標値を超えたほうの足を、表示マーク637,638により表示する。表示マーク637,638の表示では、表示マーク637,638を画面に表示するか否かを選択する場合と、表示マーク637,638を常時表示しておき、荷重が目標値を超えたほうの表示マーク637,638の色を変化させる場合とがある。
【0110】
境界線634,635よりも外側にマーカ636を位置させる運動を行う場合に、境界線634,635の間隔を大きくすることにより、片脚立ちに近い状態が生じるから、使用者は体重を移動させる運動を行うことが可能になる。なお、左右の各足置台211,212が1往復する間に力検出手段511,512により検出される荷重を力評価量に用いると上述の動作が可能になる。なお、図8のバーグラフ63では、中央を示す指標633は表示しなくてもよい。
【0111】
上述した動作では、運動中における目標値が固定的に設定されているが、足置台211,212の変位に伴う使用者の体重移動が考えられるから、足置台211,212の変位に伴って目標値を動的に変化させてもよい。この場合、各足置台211,212の1往復の期間において、力検出手段511,512により荷重を複数回検出し、足置台211,212の変位に伴う荷重の変化を検出する必要がある。
【0112】
すなわち、図9に示すように、両境界線637,638の間隔を固定的に設定し、境界線637,638の位置を、足置台211,212の位置変化に同期させて変化させる。図9において、上下に並ぶバーグラフ63は、図4(C)に示したバーグラフ63と同様に総荷重に対する左右の各荷重の割合を示している。また、上下に隣接するバーグラフ63は一定の時間間隔で異なる時刻(t1〜t9)に対応している。
【0113】
さらに、図9に示す例では、分割線632に対応する部位にマーカ636に代えて、足置台211,212の位置を示す位置マーク639を表示している。位置マーク639は、マーカ636と同様に円形などの形状で示す。図示例では、図9の左部に示しているように、位置マーク639が指標633に対して右側であるときには右足の底屈を示し、位置マーク639が指標633に対して左側であるときには右足の背屈を示す。また、左足の底屈および背屈は右足とは逆の関係になる。
【0114】
目標値を示す境界線637,638の位置は、足置台211,212の変位に伴う荷重の変化の望ましい範囲を挟むように設定される。したがって、使用者は、マーカ636が境界線637,638の間に位置するように意識して運動を行うことにより、平衡感覚を向上させることができる。なお、図示例では、足置台211,212の変位に伴う底屈の際に目標値が大きくなり、背屈の際に目標値が小さくなる場合を示している。
【0115】
上述の例では、目標値を境界線637,638によって示しているが、目標値の表示方法は適宜に選択することができる。たとえば、目標値を範囲で表すのではなく、1つの目標値のみを設定し、目標値を示す位置にマーカ636と同様の形状である円形のポイントを置いてもよい。この場合、マーカ636とポイントとは色あるいは大きさを異ならせて識別できるようにしておくことが望ましい。この場合、使用者は目標値を示すポイントの位置にマーカ636を近づけるように体重移動を行うように運動すればよい。
【0116】
上述の例では、底屈に対して目標値を大きくし、背屈に対して目標値を小さくしているが、逆に底屈に対して目標値を小さくし、背屈に対して目標値を大きくすれば、難易度の高い運動が可能になる。また、目標値を足置台211,212の変位に同期させて規則的に変化させるのではなく、不規則に目標値を変更すれば、より難易度が高まり、運動にゲーム性を付加することになる。
【0117】
さらに、図9においてバーグラフ63の左側に並べて示しているように、足置台211,212の位置情報を各バーグラフ63に対応付けて表示器532に表示すると、使用者に意識付けができ、運動効果が高まることが期待できる。
【0118】
ただし、図9に示す表示内容を表示器532に表示すると、画面内でバーグラフ63の占有領域が狭くなる。この場合、足置台211,212の位置情報をバーグラフ63の中に位置マーク639のみで示すようにしてもよい。すなわち、図の左部に示した足の位置の図形を表示器532には表示せず、表示器532の画面にバーグラフ63のみを表示してもよい。また、図10に示す例のように、目標値を示す境界線637,638を省略することもできる。
【0119】
上述のように、位置マーク639を用いて底屈および背屈の状態を分割線632とともにバーグラフ63に示すことにより、使用者は足置台211,212の変位に追従して体重移動を行っているか否かを容易に確認することができる。
【0120】
上述の構成では、左右の足をそれぞれ載せる一対の足置台を設けるとともに、各足置台にそれぞれ荷重センサを設けた構成を採用している。ただし、両足を載せる1個の足置台を設け、足置台に作用する荷重を検出する荷重センサと、足置台の傾斜角度を検出する傾きセンサとを組み合わせて用いることにより、左右の足にそれぞれ作用する荷重を算出する構成を採用してもよい。
【符号の説明】
【0121】
30 駆動手段
31 モータ(駆動源)
53 表示手段
54 目標設定手段
61 バーグラフ
62 バーグラフ
63 バーグラフ
211 足置台
212 足置台
511 力検出手段
512 力検出手段
522 バランス評価手段
523 報知手段
524 履歴記憶手段
525 比較手段
610 基準線
611,612 バー
620 基準線
621 バー
631 バー
【技術分野】
【0001】
本発明は、使用者の左右の足を載せる足置台を駆動源からの駆動力で変位させることにより、使用者に他動的に運動を行わせる他動運動機器に関するものである。
【背景技術】
【0002】
従来から、使用者の身体の少なくとも一部を他動的に変位させることにより、使用者が自発的に筋力を発揮することなく、使用者に他動的に運動を行わせるようにした他動運動機器が提案されている。この種の他動運動機器としては、使用者が立位で使用するとともに、使用者の左右の足を載せる足置台を駆動源からの駆動力で変位させる構成が知られている(たとえば、特許文献1参照)。特許文献1に記載された構成では、使用者の脚部に他動的に筋刺激を与えて使用者の筋活動を誘発することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−154879号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、多くの人の運動能力は左右で異なっていることが多く、そのため筋力も左右で異なっていることが多い。また、生活場面では左右の手足のうち筋力の強い側を使用する頻度が高くなるから、生活習慣により左右の筋力差が増大することも多い。左右の筋力差が大きくなれば、場合によっては体幹に歪みが生じる可能性もある。
【0005】
また、種々の身体的障害(骨折、神経障害、血行障害など)や脳障害などにより左右の身体能力が不均衡になる場合があり、この種の障害に対する回復訓練(リハビリテーション)の際には、左右の身体能力の均衡を回復させる訓練が含まれることもある。
【0006】
このような使用者の左右の偏りを検出する技術として、板状の台の上に載った状態で足に作用する荷重を静的に計測する技術が知られている。ただし、この種の技術は、静止した状態において使用者の左右の偏りを検出しているだけであるから、使用者の運動に伴って左右の身体能力の不均衡を是正するためには用いることができない。
【0007】
本発明は、運動中に左右の足に作用する力を検出するとともに、使用者に左右の力のかかり方を認識させることにより、左右の偏りのない運動を行うように意識付けることを可能にした他動運動機器を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、上記目的を達成するために、左右の足をそれぞれ載せる一対の足置台と、駆動源を備え各足置台を変位させる駆動手段と、各足置台に作用する力をそれぞれ検出する力検出手段と、力検出手段が検出した力から求められる力評価量を表示する表示手段とを備える構成を採用している。
【0009】
力評価量は各足置台にそれぞれ作用する力であって、表示手段は力評価量をグラフにして表示するのが望ましい。
【0010】
また、力評価量は両足置台に作用する力の総量に対する各足置台にそれぞれ作用する力の割合であって、表示手段は、力評価量をグラフにして表示してもよい。
【0011】
あるいはまた、力評価量は各足置台にそれぞれ作用する力の差であって、表示手段は、力評価量をグラフにして表示してもよい。
【0012】
力評価量は両足置台に作用する力の総量に対する各足置台にそれぞれ作用する力の割合であって、表示手段は、前記総量を表す図形を力評価量に応じた割合で分割するグラフにして力評価量を表示する構成を採用することができる。
【0013】
表示手段は、グラフとして左右方向のバーの長さで力評価量を表すバーグラフを用いることができる。
【0014】
表示手段は、力評価量について、左側の成分を左向きに表示し、右側の成分を右向きに表示してもよい。
【0015】
また、力検出手段により検出された左右の力の差が規定の範囲内か否かを報知する報知手段を備えていてもよい。
【0016】
また、力検出手段により検出された左右の力の分布を評価するバランス評価手段を備え、バランス評価手段による評価結果を前記表示手段に表示する構成を採用してもよい。
【0017】
力検出手段により検出された力の履歴を記憶する履歴記憶手段を備え、表示手段は履歴記憶手段に記憶された履歴を表示するようにしてもよい。
【0018】
力検出手段により検出される力をあらかじめ設定した目標値と比較する比較手段を備え、表示手段は、比較手段による比較結果を表示する機能を備えていてもよい。
【0019】
この場合、比較手段に与える目標値を設定する目標値設定手段を備えるのが望ましい。
【0020】
また、表示手段は、足置台の位置情報を表示してもよい。
【発明の効果】
【0021】
本発明の構成によれば、運動中に左右の足に作用する力を検出し、力から求められる力評価量を表示することによって、使用者に左右の力のかかり方を認識させることができるから、左右の偏りのない運動を行うように意識付けることができる。その結果、使用者には左右の不均衡を是正するように運動を行わせることが可能になる。
【図面の簡単な説明】
【0022】
【図1】実施形態を示すブロック図である。
【図2】同上を示す要部分解斜視図である。
【図3】同上を示す透視した平面図である。
【図4】同上の表示例を示す動作説明図である。
【図5】同上の表示例を示す動作説明図である。
【図6】同上の表示例を示す動作説明図である。
【図7】同上の表示例を示す動作説明図である。
【図8】同上の表示例を示す動作説明図である。
【図9】同上の表示例を示す動作説明図である。
【図10】同上の表示例を示す動作説明図である。
【発明を実施するための形態】
【0023】
本実施形態は、図2および図3に示す構成を備える。図示例は、床上に載置して使用する構成を示しているが、床に埋め込んで使用する構成を採用してもよい。
【0024】
ハウジング10は、床上に載置されるベース板11と、ベース板11の上方に配置される上板12とを結合して形成される。
【0025】
図示するベース板11および上板12は外周形状が長方形状であるが、ベース板11および上板12の外周形状についてはとくに制限はない。以下では、説明を簡単にするために、ベース板11を床上に載置した状態でハウジング10の上面が床面と平行になるものとする。したがって、図2および図3における上下が使用時の上下になる。図示例は、ハウジング10を床に固定しておらず適宜の位置で使用できる場合を示しているが、ハウジング10を床に固定して定位置で使用する構成を採用してもよい。
【0026】
図示例では、ハウジング10は直方体状に形成されているが、内部に収納用の空間を備えるものであればハウジング10の外観形状として円筒状、多角筒状などを採用することもできる。なお、床に埋め込んで使用する構成では、ハウジング10として上板12を除く部材を軸組のみとした構造を採用することが可能である。
【0027】
図示する他動運動機器は、使用者が立位で使用することを想定しており、使用者が左右の足をそれぞれ載せる一対の足置台211,212を備える。足置台211,212は、各足置台211,212を変位させる駆動手段30とともに、ハウジング10に配置される。以下では、図2および図3に示す矢印Xの向きを前方として説明する。
【0028】
上板12には、各足置台211,212をそれぞれ露出させる矩形状に開口した2個の開口窓131,132が貫設される。各開口窓131,132は、前後方向の寸法が左右方向の寸法よりも大きい矩形状に形成される。また、各開口窓131,132の長手方向に沿った中心線は、ハウジング10の前後方向に対して交差する。
【0029】
左の開口窓131の長手方向に沿った中心線は前端部が後端部よりも左側に位置し、右の開口窓132の長手方向に沿った中心線は前端部が後端部よりも右側に位置する。すなわち、両開口窓131,132の長手方向に沿った中心線間の距離は、ハウジング10の前端側で後端側よりも大きくなる。
【0030】
開口窓131,132の長手方向がベース板11の前後方向に対してなす角度は、たとえば5〜15度の範囲で適宜に設定される。角度は、左側の開口窓131については後端を中心にして左回りの角度を採用し、右側の開口窓132については後端を中心にして右回りの角度を採用する。
【0031】
各足置台211,212は、それぞれ各開口窓131,132の長手方向に沿ってスライド可能である足置カバー22と、使用者が足を載せるための足置板23とにより構成される。図3には右側の足置カバー22および足置板23のみを記載している。各足置板23には、足置板23の下面周部を囲むカバー体241,242が取り付けられる。
【0032】
各足置カバー22は角筒状に形成され、内部には軸受板25が取り付けられる。軸受板25は各開口窓131,132の幅方向に沿った軸体26を支持し、軸体26は足置板23の下面に設けた軸受(図示せず)に通される。したがって、足置板23は足置カバー22に対して軸体26の回りで揺動可能になっている。
【0033】
足置板23に取り付けられたカバー体241,242は、各足置カバー22の内側に挿入される。したがって、足置板23が軸体26の回りで揺動して足置板23の前端部および後端部が上下に移動するのに伴ってカバー体241,242が上下に移動し、足置カバー22と足置板23との間に隙間が生じるのをカバー体241,242が防止する。
【0034】
足置カバー22の上端縁の周部には全周に亘ってフランジ部221が形成されている。一方、上板12の下面には、開口窓131,132の長手方向に沿った周部において、レール部材(図示せず)が取り付けられている。レール部材は、開口窓131,132の内向きに開口するレール溝(図示せず)を形成する。
【0035】
足置カバー22におけるフランジ部221の一部がレール溝に挿入されることにより、足置カバー22のハウジング10に対する移動範囲が制限される。フランジ部221とレール溝との間には余裕があり、フランジ部221がレール溝に挿入されている範囲内において足置カバー22が前後左右に移動する。また、フランジ部221は、足置カバー22の移動範囲において開口窓131,132の開口縁と足置板23との間に隙間を形成しない寸法に形成されている。
【0036】
足置カバー22の下面には台車41が取り付けられる。台車41の外側面には各2個ずつの車輪42が取り付けられる。ベース板11の上面には各足置台211,212に対してそれぞれ2本ずつのレール43が固定されており、レール43の上面において車輪42が転動するように、レール43上に台車41が載置される。また、レール43の上面には車輪42がレール43から脱落するのを防止するために、車輪42の側面に当接する脱輪防止板44が固定される。
【0037】
ところで、上述したように、左右の開口窓131,132は、長手方向に沿った中心線間の距離が前端側で後端側よりも大きくなるように形成してある。すなわち、開口窓131,132の中心線は、ハウジング10の前後方向に対して所定の角度をなしている。レール43も開口窓131,132の中心線と同様に、延長方向がハウジング10の前後方向に対して所定の角度をなしている。ここに、レール43は、延長方向がハウジング10の前後方向に対してなす角度が、開口窓131,132の中心線がハウジング10の前後方向に対してなす角度よりも大きくなるように配置されている。
【0038】
たとえば、開口窓131,132の中心線がハウジング10の前後方向に対してなす角度を10度とすれば、レール43の延長方向がハウジング10の前後方向に対してなす角度は45度などに設定される。
【0039】
上述の構成によって、足置台211,212はレール43の長手方向に沿って往復移動することが可能になる。このとき、足置台211,212の移動経路は、台車41と車輪42とレール43と脱輪防止板44とにより拘束される。ここに、レール43の延長方向と開口窓131,132の長手方向とが異なっているから、足置カバー22および足置板23は開口窓131,132の長手方向に交差する方向に移動する。
【0040】
すなわち、足置台211,212の長手方向に足の長手方向を一致させると、足置台211,212は、足の長手方向とは異なる方向に移動する。これは、足置台211,212をレール43の延長方向に移動させたときに、使用者の膝に大きな剪断力が作用するのを防止するためである。
【0041】
ところで、左右の各足置台211,212を変位させる駆動手段30は、駆動力を発生させる駆動源31を備える。駆動源31からの駆動力は、各足置台211,212にそれぞれ伝達されるように系統分離部32において2系統に分離される。さらに、系統分離部32で分離された各系統の駆動力は、往復駆動部33を介して左右の各台車41に伝達され、台車41をレール43に沿って往復移動させる。
【0042】
駆動手段30について、さらに具体的に説明する。駆動源31には回転モータ(以下、単にモータと略称し、符号31を用いる)を採用しており、モータ31の出力軸311には系統分離部32が連結される。
【0043】
系統分離部32は、モータ31の出力軸311に連結されたウォーム321と、ウォーム321に噛合する2個のウォームホイール322とを備える。ウォーム321および2個のウォームホイール322は、ベース板11に固定されるギアボックス34に収納される。ギアボックス34は、上面に開口を有するギアケース341と、ギアケース341の開口面に覆着される蓋板342とにより形成される。ギアケース341と蓋板342との間にはウォーム321の長手方向の両端部を回転可能に支持する一対の軸受323が取り付けられる。
【0044】
ウォームホイール322には、ギアケース341と蓋板342とに保持される回転軸35が挿通され、ウォームホイール322の回転に伴って回転軸35が回転するように、ウォームホイール322と回転軸35とを結合してある。
【0045】
モータ31は、ギアケース341に設けた口受部343とベース板11に固定した口受板111とに載置され、ギアケース341に覆着される蓋板342と口受け板111に結合される押さえ板112とによりベース板11に固定される。
【0046】
往復駆動部33は、回転軸35に一端部が一体に結合されるクランク板36と、クランク板36にクランク軸37を介して結合されたクランクロッド38とを備える。クランク板36は回転軸35とともに回転するように回転軸35に結合される。すなわち、ウォームホイール322は回転軸35に結合され、回転軸35にはクランク板36が結合されるから、ウォームホイール322とクランク板36とは一体に回転する。
【0047】
クランク軸37の一端部はクランク板36の他端部に固定され、クランク軸37の他端部はクランクロッド38の一端部に保持された軸受381に保持される。つまり、クランクロッド38の一端部はクランク板36に対して回動自在に結合される。クランクロッド38の他端部は台車41に対して軸体382を用いて結合される。つまり、クランクロッド38の他端部は台車41に対して回動自在に結合される。
【0048】
上述の構成から明らかなように、クランクロッド38は、ウォームホイール322の回転力を台車41の直進往復移動に変換する変換機構として機能する。また、クランクロッド38はウォームホイール322ごとに設けられ、台車41は各足置台211,212において個別に設けられている。それゆえ、各クランクロッド38は、各ウォームホイール322の回転力をそれぞれ足置台211,212の往復移動に変換する。
【0049】
台車41は上述のように移動経路が拘束されているから、ウォームホイール322の回転に伴って台車41がレール43の長手方向に沿って往復移動する。つまり、モータ31の回転がウォーム321およびウォームホイール322を介してクランク板36に伝達され、さらに、クランク板36に結合されたクランクロッド38により台車41がレール43に沿った直線上で往復移動を行うのである。その結果、台車41に結合されている足置カバー22がレール43に沿って往復移動する。つまり、両足置台211,212がレール43の長手方向において往復移動する。
【0050】
ここに、ウォーム321と2個のウォームホイール322とにより駆動力を2系統に分離し、各系統ごとに足置台211,212の駆動力として用いるから、両足置台211,212は駆動手段30により関連付けて駆動される。各ウォームホイール322はウォーム321に噛合する位置を180度異ならせてある。そのため、左側の足置台211が移動範囲の後端に位置するときには、右側の足置台212は移動範囲の前端に位置する。左側の足置台211の移動範囲における後端は左側の足置台211の移動範囲の右端であって、右側の足置台212の移動範囲における前端は右側の足置台212の移動範囲の右端であるから、左右方向においては、両足置台211,212は同じ向きに移動することになる。
【0051】
ところで、各足置台211,212にそれぞれ設けた足置板23は足置カバー22に対して軸体26の周りで回動可能であるから、足置板23の前端部と後端部との高さ位置を変化させることが可能になっている。つまり、足置板23の上に置いた足の爪先と踵との高さ位置を変化させることにより、足関節の底屈と背屈とが可能になっている。
【0052】
ここで、軸体26の周りでの足置板23の回動をレール43の延長方向に沿った往復移動に連動させるために、ベース板11には、足置板23の移動経路に沿って少なくとも一部に傾斜面を有したガイド面(図示せず)が形成され、足置板23の下面にはガイド面に当接する倣い突部231が設けられる。倣い突部231の先端部は、ガイド面に対する摩擦係数が小さくなるように材料および形状を選択しておけばよいが、本実施形態では、ガイド面の上で転動するローラ232を倣い突部231の先端部に設けている。
【0053】
上述のように、ガイド面に当接する倣い突部231を設けていることにより、モータ31の回転に伴って各足置台211,212が往復移動を行うと、倣い突部231がガイド面に沿って移動し、足置板23が軸体26の周りで回動する。すなわち、足置板23のベース板11に対する角度が変化し、結果的に足関節の底屈および背屈が行われる。
【0054】
ガイド面の形状についてはとくに制限はないが、本実施形態では、足置台211,212の1往復の間に足関節の底屈と背屈とを1回ずつ行うようにガイド面を形成する。したがって、ガイド面としては、全長に亘ってベース板11の上面に対して一定角度で傾斜する形状か、中間部において傾斜の向きが変化する形状(V字状、U字状、逆V字状、逆U字状など)を採用することが望ましい。
【0055】
上述した他動運動機器は、基本的には立位で使用する。この場合、足置台211,212が停止している初期位置において、左右の足をそれぞれ足置台211,212に載せて立ち、駆動手段30の運転を開始させる。足置台211,212の長手方向は前後方向(矢印Xの向き)に対して、10度程度の角度をなすように配置され、足置台211,212の上に立ったときに、使用者の脚部に捻れを生じることがなく、自然な立ち位置になるようにしてある。
【0056】
初期位置では、両足置台211,212は前後方向における同じ位置に停止する。すなわち、初期位置では両足置台211,212が左右方向の一直線上に並ぶ。したがって、初期位置で使用者が両足をそれぞれ左右の足置台211,212の上に載ると、使用者の重心から鉛直方向に下ろした直線は両足置台211,212の間でほぼ中央を通ることになる。
【0057】
モータ31の回転を開始すると、両足置台211,212はそれぞれ前後方向の位置を変化させるとともに、前後方向の位置変化に伴って左右方向の位置も変化させる。このとき、両足置台211,212はレール43に沿った一直線上を往復移動し、各足置台211,212は足の前後方向(長手方向)とは異なる方向に移動する。たとえば、ハウジング10の前後方向に対して45度をなす方向に移動する。
【0058】
また、足置台211,212がレール43に沿って往復移動すると同時に、足置板23が軸体26の周りに回動する。たとえば、足置板23が前方に移動する際に、倣い突起25が上方に移動するようにガイド面を形成しておけば、足置台211,212の前端位置において足関節を背屈させ、足置台211,212の後端位置において足関節を底屈させることができる。軸体26の位置は足裏において踵付近に設定し、底屈と背屈との角度はベース板11の上面に対してそれぞれ10度程度に設定する。
【0059】
なお、足置台211,212の前後の位置と底屈および背屈との関係は上述の例とは逆にすることが可能である。また、ベース板11の上面に対する底屈および背屈の角度は異ならせてもよい。これらの動作はガイド面の形状を適宜に設定することにより、容易に実現することができる。
【0060】
図2、図3に示す構成では、使用者の上体を支持する構成を設けていないが、使用者が把持する手摺を設けてもよい。手摺はハウジング10に一体に設けるほか、装置を使用する場所において造営物側に設けるようにしてもよい。手摺を設けておけば手摺によって使用者は身体を支えることができるからバランス機能が衰えている使用者でも利用しやすくなる。また、立位で使用することが基本であるが、障害の回復訓練などに用いる目的であって、立位が困難な場合には座席を設けて着座姿勢で利用してもよい。
【0061】
上述の構成例では、足置台211,212の移動軌跡は前方に開放されたV字状になるが、逆に、足置台211,212の左右方向の距離を前端側よりも後端側で広くなるようにして逆V字状の移動軌跡を採用してもよい。あるいは、足置台211,212の前端位置と後端位置とで距離が変化しない動作や、移動軌跡の左端と右端との位置が前後方向において変化しない動作を採用してもよい。
【0062】
上述した他動運動機器を用いて運動を行えば、足関節の底屈と背屈とが行われるから、ふくらはぎの筋群(腓腹筋等)への筋刺激が増加し、ふくらはぎの筋群の伸縮に伴って脚部からの静脈環流が促進される。このことは、全身の血行の向上につながる。また、足関節が回動することにより使用者は前後方向のバランスを維持する筋群が刺激され、とくに前後方向において転倒しないように姿勢を維持する神経系の反射によって、脚部だけではなく、腰背部の筋群の筋活動も誘発されることになる。
【0063】
モータ31の回転速度などの制御は、制御手段50(図1参照)からの指示により行われる。制御手段50は、もっとも単純にはモータ31への電源の入切を行う構成でよい。また、モータ31が直流モータであれば、モータ31に通電する電流をスイッチング素子によって断続させるとともに、スイッチングの際のオンデューティを変化させることにより、モータ31に供給する平均電力を調節するように制御手段50を構成してもよい。さらには、使用者の身体状態に併せて、使用時間を設定したり、モータ31の回転速度を経過時間に応じて変化させるように制御したりする機能を制御手段50に設けてもよい。
【0064】
ところで、本実施形態は、使用者に左右の偏りがない運動を行わせるために、運動中における左右の偏りの程度を利用者に提示する構成を備えている。ここでの左右の偏りは、使用者の左右の筋力差による偏りのほか、使用者の身体の左右の傾きによる偏りも含まれる。この種の偏りは、使用者の足に作用する力を検出することにより、評価することができる。
【0065】
そこで、上述した足置台211,212には、それぞれ力検出手段511,512(図1参照)を配置してある。力検出手段511,512は、各足置板23に作用する下向き荷重(重力により作用する下向きの力)を検出する構成のほか、前後、上下、左右の3方向の荷重と各方向の軸周りのトルクとから選択される1ないし複数の力を検出する構成を採用することができる。力検出手段511,512は、ロードセル、加速度センサ、ジャイロセンサ、トルクセンサなどから選択して用いる。また、力検出手段511,512を配置する部位は、各足置台211,212にそれぞれ設けた各足置板23のほか、足置カバー22、軸受板25、軸体26などに配置することも可能である。
【0066】
以下では、力検出手段511、512として、左右の各足置板23に作用する下向き荷重をそれぞれ検出するロードセルを各足置板23に配置した構成を想定する。図1に示すように、各力検出手段511,512により検出された左右の各足置台211,212に作用する荷重(各足置板23に作用する下向き荷重)は評価手段52に入力される。
【0067】
評価手段52は、後述するように、力検出手段511,512が検出した力(荷重)に基づいて使用者の左右の均衡を評価するための力評価量を求めるとともに、左右の均衡を評価し、力評価量および評価結果を表示手段53に引き渡す。表示手段53では、評価手段52から引き渡された力評価量および評価結果を使用者に表示する。
【0068】
評価手段52および表示手段53は、マイコンあるいはFPGAのようにプログラムに従って動作するプロセッサおよびメモリを主構成とする。ただし、評価手段52および表示手段53には外部装置を接続するインターフェースを設けることが望ましい。
【0069】
評価手段52に外部装置としてパーソナルコンピュータを接続すれば、後述する目標設定手段54としてパーソナルコンピュータを用いることができる。また、表示手段53に外部装置としてパーソナルコンピュータやテレビジョン受像機を接続すれば、後述する表示器532としてパーソナルコンピュータやテレビジョン受像機のモニタ装置を用いることができる。
【0070】
評価手段52は、各力検出手段511,512が検出した力(荷重)を用いて以下に説明する力評価量を求める力評価手段521を備える。力評価量には以下の3種類があり、力評価手段521としては、3種類の力評価量のいずれかを選択して求める構成と、3種類の力評価量のうちの1種類のみを求める構成とのいずれかを採用する。力評価量は、運動中に各力検出手段511,512が検出する荷重のデータを一定周期で収集し、所定期間において収集した荷重のデータから左側と右側との荷重を算出する。
【0071】
たとえば、左右の荷重を求めるために荷重のデータを収集する期間を、左右の足置台211,212が1回ずつ往復する期間とし、この期間内に各力検出手段511,512から得られた荷重のデータを左右の荷重として用いる。力検出手段511,512は、足置台211,212の1回の往復の間に荷重のデータを複数回検出してもよい。すなわち、足置台211,212の1往復の間に、荷重のデータのサンプリングを複数回行ってもよい。この場合、1往復毎に荷重のデータの平均値あるいは中央値のような代表値を求め、この代表値を各足置台211,212に関する荷重として用いる。
【0072】
荷重のデータを収集する期間と、荷重のデータを収集する周期とは適宜に設定することができる。ただし、運動中の使用者に左右の荷重の均衡の程度を視覚化して示すために、荷重のデータを収集する期間は比較的短くすることが望ましく(0.数秒以内)、荷重のデータを収集する周期は各足置台211,212の往復の周期の整数分の1であることが望ましい。
(1)各力検出手段511,512により検出される下向き荷重。すなわち、各足置台211,212にそれぞれ作用する力。
(2)両力検出手段511,512により検出される下向き荷重の総量に対する各力検出手段511,512により検出される下向き荷重の割合。すなわち、両足置台211,212に作用する力の総量に対する各足置台211,212に作用する力の割合。左右のそれぞれの割合は、(左側の荷重/荷重の総量)と(右側の荷重/荷重の総量)とになる。
(3)両力検出手段511,512により検出される下向き荷重の差。すなわち、各足置台211,212に作用する力の差。この値は、(右側の荷重−左側の荷重)または(左側の荷重−右側の荷重)として求められる。
(4)両力検出手段511,512により検出される下向き荷重の総量に対する、両力検出手段511,512により検出される下向き荷重の差の割合。すなわち、(右側の荷重−左側の荷重)/荷重の総量
なお、両力検出手段511,512により検出される下向き荷重の総量は、各力検出手段511,512により検出される下向き荷重の和を用いる。ただし、使用者の質量(体重)が既知であれば、使用者の質量を総量に代えて用いてもよい。
【0073】
力評価手段521により求められた力評価量は表示手段53に引き渡される。表示手段53は、力評価量をグラフにして表示する。すなわち、表示手段53は、力評価量を表すグラフを生成するグラフ生成手段531と、グラフを含む表示内容を画面上に表示する表示器532と、表示器532への表示内容を生成する表示処理手段533とを備える。表示器532は、運動中の使用者が視認できるように配置される。
【0074】
表示器532としては、専用のモニタ装置を用いるほか、テレビジョン受像機やパーソナルコンピュータに付属している既存のモニタ装置を流用することもできる。この場合、表示処理手段533には、既存のモニタ装置に画像を出力するためのインターフェースを設ける。
【0075】
専用のモニタ装置を用いる場合には、運動中に使用者が把持する手摺を設けておき、手摺の上部にモニタ装置を取り付ければよい。手摺は、ハウジング10と一体でも別体でもよい。手摺の具体的形状としては、運動中の使用者の前方においてハウジング10から立てた支柱の上端部に、自転車のハンドルと類似した両手で把持する構成を採用することができる。あるいはまた、運動中の使用者の前方と両側方との三方を囲む柵状の手摺をハウジング10に設けてもよい。
【0076】
表示器532の表示内容は、左右の足置台211,212に作用する荷重の均衡の程度を使用者にわかりやすく提示するように生成される。したがって、グラフ生成手段531は、表示器532の画面上において、左右の足置台211,212に作用する荷重を、画面上の左右に対応付けたグラフを生成する。グラフ生成手段531が生成するグラフとしては、左右方向のバーの長さによって力評価量を表すバーグラフ61,62,63(図4参照)と、縦方向のバーの長さによって力評価量を表すバーグラフ64(図5(A)参照)と、円の中心角によって力評価量を表す円グラフ65(図5(B)参照)とのいずれかを用いる。
【0077】
左右方向のバーの長さにより力評価量を表すバーグラフでは、上述した(1)〜(3)のすべての力評価量を表現することができる。
【0078】
たとえば、図4(A)に示すように、縦方向の基準線610を設定したバーグラフ61を用いると、各足置台211,212にそれぞれ作用する荷重と、各足置台211,212にそれぞれ作用する荷重の総量(総荷重)に対する割合とのいずれかを表すことができる。このバーグラフ61では、バー611,612を帯状の図形で表しており、力評価量の大きさが基準線610に対するバー611,612の長さで表される。すなわち、力評価量の左側の成分が基準線610から左向きに表され、力評価量の右側の成分が基準線610から右向きに表される。ただし、両バー611,612は一直線上に配置され、1本のバーを形成している。
【0079】
バーグラフ61を用いると、各足置台211,212にそれぞれ作用する荷重に応じてバー611,612の長さが変化する。また、バーグラフ61を用いて各足置台211,212にそれぞれ作用する荷重を力評価量として表す場合、荷重の総量に応じて両バー611,612の合計の長さが変化する。一方、バーグラフ61を用いて荷重の総量に対する割合を力評価量として表す場合には、両バー611,612を合計した長さは一定長に保たれる。
【0080】
図4(A)に示すバーグラフ61を用いると、使用者の左右の荷重が均衡しているか否かの目安を、基準線610に対する左右のバー611,612の長さが等しいか否かによって視覚的に認識することが可能になる。また、力評価量として左右の荷重を用いる場合は、荷重の総量に応じて両バー611,612の合計の長さが変化するから、使用者が足置台211,212を踏み込む力を視覚化することができる。一方、力評価量として荷重の総量に対する割合を用いる場合は、使用者の質量(体重)にかかわりなく、使用者の左右の荷重の大きさを視覚化することができる。
【0081】
各足置台211,212に作用する荷重の差を表す場合は、図4(B)に示すように、縦方向の基準線620を設定したバーグラフ62を用い、荷重の差を基準線620からのバー621の長さに対応付ければよい。ここでは、荷重の差である力評価量を、右側の足置台212に作用する荷重から左側の足置台211に作用する荷重を減算した値と定義する。この場合、右側の荷重が左側の荷重よりも大きいときに力評価量の符号は正になり、左側の荷重が右側の荷重よりも大きいときに力評価量の符号は負になる。
【0082】
そこで、図4(B)に示すバーグラフ62では、力評価量が0である位置を基準線620の位置に対応付け、符号が正の場合には、図に実線で示すように、基準線620の右側にバー621を表示し、符号が負の場合には、図に破線で示すように、基準線620の左側にバー621を表示する。図4(B)に示すバーグラフ62を用いると、使用者の左右の荷重が均衡した状態に近付くほどバー621が短くなるから、左右の均衡の程度を視覚的に認識するのが容易になる。
【0083】
ところで、荷重の総量に対する割合を力評価量とする場合には、図4(C)に示すように、左右方向のバー631の両端位置を固定した一定長のバーグラフ63を用いてもよい。このバーグラフ63では、帯状の図形であるバー631を分割する位置を力評価量に応じて変化させる。すなわち、両足置台211,212にそれぞれ作用する荷重の総量(総荷重)を両バー631の長さに対応付け、総量に対する割合に応じてバー631の分割位置を変化させるのである。
【0084】
したがって、使用者が左右の足置台211,212に作用させる力が均衡していれば、分割線632の位置がバー61の中央付近に移動することになる。そのため、バー631を二等分する位置に指標633を表記しておくことが望ましい。この場合、分割線632と指標633との距離が小さいほど使用者の左右の均衡の程度が高いことを表すことになる。
【0085】
図4(A)(B)に示した各バーグラフ61,62では、基準線610,620の左側のバー611,621と右側のバー612,622とを表示する際の色を異ならせておくのが望ましい。また、図4(C)に示すバーグラフ63では、分割線632の右側と左側とで表示する色を異ならせておくのが望ましい。たとえば、右側を赤色、左側を青色などで表示すればよい。このように、左右の成分を異なる色で表すことにより、使用者の荷重が左右のどちらに偏っているかを一見して視認することが可能になる。
【0086】
力評価量を示すグラフとしては、図5(A)に示すように、縦方向の2本のバー641,642を左右に配置したバーグラフ64を用いてもよい。このバーグラフ64では、使用者の左側の荷重(左側の足置台211に作用する荷重)に相当する力評価量を左側のバー641で表し、使用者の右側の荷重に相当する力評価量を右側のバー642で表す。力評価量としては、各足置台211,212にそれぞれ作用する荷重と、荷重の総量に対する左右の各荷重の割合とのいずれかを用いる。このバーグラフ64を用いる場合には、人を示す図形643をバー641,642に重ねて表示してもよい。また、各バー641,642の色を異ならせてもよい。
【0087】
図5(B)に示すグラフは円グラフ65であって、図4(C)に示したバーグラフ63と同様に図形の分割位置に応じて力評価量を表している。また、力評価量として荷重の総量に対する左右の各荷重の割合を用いる。ただし、分割する図形は帯状ではなく、円形である点が図4(C)のバーグラフ63とは相違する。円グラフ65は、通常の円グラフと同様に、表現する量を中心角に対応付けている。
【0088】
ここでは、円の中心を通る縦方向の直線のうち円の中心から上側の部分を基準線651に用い、基準線651に対して右回りに中心角を規定している。また、円の中心を一端とする分割線652を設定し、基準線651に対して分割線652がなす角度で中心角を表している。したがって、使用者の左右の荷重が均衡して力評価量が50%となるとき、分割線652は基準線651に対して一直線上に並ぶことになる。このように、分割線652の位置を目安に用いることによって、使用者の左右の均衡の程度を視覚的に視認することが可能になる。円グラフ65を用いる場合も基準線651と分割線652とで囲まれた2領域を異なる色で表すのが望ましい。また、分割線652の左側の領域を力評価量の左側の成分に対応付け、右側の領域を力評価量の右側の成分に対応付ける。
【0089】
上述した構成では、力評価量を示すグラフを表示器532に表示することによって、使用者に力評価量を視覚的に認識させるだけであるから、左右の均衡の程度は使用者自身が認識する必要がある。以下では、左右の均衡の程度を使用者自身が認識しなくとも、表示手段53などから使用者に報知する技術について説明する。
【0090】
左右の均衡の程度を使用者に報知するために、本実施形態では、図1に示すように、評価手段52に、バランス評価手段522と報知手段523とを設けている。バランス評価手段522は、力検出手段511,512の出力をサンプリングすることにより収集した左右一対の荷重(力)のデータ(左右の力検出手段511,512により計測した荷重を対にしたデータ)を評価する。
【0091】
対になるデータの分布の評価には、対になるデータごとに差を求め、複数対のデータについて差の平均値を用いることができる。この場合、使用者の左右の荷重の偏りが少ないほど、求めた平均値は0に近付く。また、対になるデータの分布の評価には、対になるデータの総和に対して一方のデータの割合を求め、複数対のデータについて割合の平均値を用いることができる。この場合、使用者の左右の荷重の偏りが少ないほど、求めた平均値は0.5に近付く。
【0092】
バランス評価手段531は、上述のような演算により左右の荷重の分布を評価し、評価の結果を表示手段53に表示する。すなわち、対になる荷重のデータから求めた評価のための値(差の平均値、割合の平均値など)を数値として表示手段53に提示する。このような表示を行えば、使用者は左右の荷重の均衡の程度を数値によって知ることができる。また、荷重の分布を数値化することにより荷重の偏りの傾向を把握することができる。
【0093】
ところで、報知手段523は、力検出手段511,512により検出された左右の荷重の一致の程度を評価するバランス評価量を求める機能を有している。バランス評価量は、上述した左右の荷重(所定の期間おいて求めた複数個の荷重のデータの代表値)を用いて求める。具体的には、上述した力評価量を求めるための左右の荷重を用い、左右の荷重の和(荷重の総量)に対する右側あるいは左側の荷重をバランス評価量に用いることができる。
【0094】
このバランス評価量が0.5に対して規定した範囲(たとえば、±0.05)であるときは、左右の荷重がほぼ均衡していると判断することができる。したがって、報知手段523において、バランス評価量に対する範囲を規定しておき、バランス評価量が規定の範囲内であると判断するときに報知すれば、使用者は左右の荷重が均衡しているかを自身で判断する必要がなくなる。たとえば、左右の荷重が規定した範囲内になったときに、バーグラフ63の色を変化させることで報知することができる。
【0095】
たとえば、常時は力評価量の右側の成分を赤色、左側の成分を青色で表しているとして、報知する条件が成立したときに、バー631の全体を緑色で表すようにすれば、使用者は左右の荷重が均衡したことを瞬時に認識することができる。なお、表示器532を用いて報知するほか、表示器532とは別に設けた表示灯により報知したり、音による報知を行うようにしてもよい。
【0096】
また、図6に示すように、図4(C)で示したバーグラフ63を表示手段53に提示する場合、バーグラフ63には中央を示す指標633とともに、指標633から左右に一定距離だけ離れた位置に範囲を示す境界線634,635を表示する。さらに、分割線632に相当する部位にマーカ636を表示すれば、マーカ636の位置が左右の境界線634,635に挟まれた範囲内か否かによって、使用者は、左右の荷重が均衡しているか否かを直観的に知ることができる。図6(A)では左右の荷重が均衡している状態を示し、図6(B)では左右の荷重が不均衡である状態を示している。
【0097】
なお、上述の構成例では、左右の荷重の均衡の範囲を0.45〜0.55に規定しているが、この範囲は適宜に設定すればよい。たとえば、平衡感覚の低い使用者に対しては広い範囲で設定し、平衡感覚が高くなるほど狭い範囲に設定することも可能である。
【0098】
さらに、バランス評価量として荷重の総量に対する左右の一方の荷重の割合を用いているが、力評価量として左右の各荷重を用いる場合や左右の荷重差を用いる場合でも、上述したバランス評価量を用いることによって、左右の荷重が均衡しているか否かを報知することができる。上述の例では、報知手段523は、バランス評価量が規定の範囲内であるときに報知する構成としているが、バランス評価量が規定の範囲を逸脱しているときに報知する構成としてもよい。
【0099】
上述した動作では、力検出手段511,512により検出した所定期間ごとの荷重を表示手段53に表示しているが、評価手段52には荷重の変化の履歴を記憶するための履歴既往手段524を設けてもよい。履歴記憶手段524を設けている場合には、表示手段53には所定時間分ずつの力評価量の変化を表示させることができる。
【0100】
履歴記憶手段524に記憶させた履歴を表示器532に表示する例を図7に示す。図7(A)は図4(C)に示したバーグラフ63を時間経過に伴って上下に並べて表示した例である。時間軸は下から上に向かって表示されており、上下に隣接するバーグラフ63は一定時間だけ異なる時刻(t1〜t5)の力評価量を表している。
【0101】
隣接する各時刻の時間間隔は適宜に設定することができるが、ここでは左右の足置台211,212がそれぞれ1往復する時間の整数倍に設定してある。したがって、左右の均衡の程度について足置台211,212の変位の影響を除去した変化傾向を表すことができる。なお、後述するように時間間隔を短くすることにより、左右の均衡の程度について足置台211,212の変位に関連付けた変化傾向を表すことも可能である。
【0102】
履歴記憶手段524に記憶された力評価量の履歴を表示手段53に表示するにあたっては、図7(A)のようにバーグラフ63を用いるほか、図7(B)のように折れ線グラフ66を用いてもよい。図示する折れ線グラフ66では、荷重の総量に対する一方の右側の荷重の割合、あるいは右側の荷重から左側の荷重を減算した差に関する一定時間ごとの変化を表している。折れ線グラフ66を用いることによっても、バーグラフ63と同様に、左右の均衡の程度の変化傾向を示すことができる。
【0103】
図7(A)(B)のように力評価量の変化の履歴を示す際には、最新の状態を示すためのマーカ661,662を表示してもよい。マーカ661,662には、たとえば黄色の円を用いればよい。
【0104】
ところで、図2および図3に示した装置は、主として左右の荷重を均衡させることを目的にする運動以外に、平衡感覚をより強化することを目的にした運動にも用いることができる。両方の目的に用いるために、本実施形態では、図1に示すように、評価手段52に比較手段525を設けてあり、さらに比較手段525に目標値を与える目標設定手段54を設けてある。目標設定手段54は必須というわけではなく、目標値はあらかじめ比較手段525に設定しておいてもよい。
【0105】
比較手段525は、力評価量における左右の成分(力検出手段により検出される力に相当する)を目標値と比較する機能を有し、表示手段53は比較手段525による比較結果を表示する機能を有している。また、目標値は、目標設定手段5により設定することができる。目標設定手段54は、キーボードやマウスのようなコンピュータに付設した入力手段を用いるほか、専用のタッチパネルやスイッチ類を目標設定手段54に用いることが可能である。
【0106】
左右の荷重を均衡させるためにのみ運動を行う場合には、比較的狭い範囲に収まるように右側と左側との目標値が設定される。いま、図4(C)に示したバーグラフ63を表示器63に表示している場合を想定すると、目標設定手段54により設定した目標値は、図8(A)に示すように、目標値に相当する左右の境界線634,635として表示器532の画面に表示される。また、分割線632に対応する部位に円形のマーカ636が表示される。
【0107】
左右の荷重を均衡させるための運動を行う際には、境界線634,635の間隔を比較的狭く設定しておき、使用者は、両境界線634,635の間にマーカ636を入れるように身体を操作する。この場合、報知手段523と同様に、常時は力評価量の左右の成分を異なる色で表示しておき、マーカ339が両目標線の間に収まると、バー631の全体の色を左右の成分とは異なる色で表示するのが望ましい。目標値を設定可能としているから、使用者の平衡感覚の能力に応じて左右の荷重を均衡させるための運動を行うことができる。
【0108】
一方、平衡感覚の能力が高い使用者や体重移動のための運動を行う場合には、比較手段525において、境界線634,635の間にマーカ636が入ったことを検出するのではなく、境界線634,635の外側にマーカ636が出たことを検出する。また、境界線634,635の間隔が広くなるように目標値を設定する。たとえば、図8(B)のように、左側の境界線634よりもマーカ636が左側に位置するときに、バー631の色を常時に対して変化させるのである。
【0109】
この運動を行う場合には、左足と右足とのどちらの荷重が目標値を超えているかを示すために、バー631の両端部付近に、足型などの表示マーク637,638を設けてもよい。この場合、荷重が目標値を超えたほうの足を、表示マーク637,638により表示する。表示マーク637,638の表示では、表示マーク637,638を画面に表示するか否かを選択する場合と、表示マーク637,638を常時表示しておき、荷重が目標値を超えたほうの表示マーク637,638の色を変化させる場合とがある。
【0110】
境界線634,635よりも外側にマーカ636を位置させる運動を行う場合に、境界線634,635の間隔を大きくすることにより、片脚立ちに近い状態が生じるから、使用者は体重を移動させる運動を行うことが可能になる。なお、左右の各足置台211,212が1往復する間に力検出手段511,512により検出される荷重を力評価量に用いると上述の動作が可能になる。なお、図8のバーグラフ63では、中央を示す指標633は表示しなくてもよい。
【0111】
上述した動作では、運動中における目標値が固定的に設定されているが、足置台211,212の変位に伴う使用者の体重移動が考えられるから、足置台211,212の変位に伴って目標値を動的に変化させてもよい。この場合、各足置台211,212の1往復の期間において、力検出手段511,512により荷重を複数回検出し、足置台211,212の変位に伴う荷重の変化を検出する必要がある。
【0112】
すなわち、図9に示すように、両境界線637,638の間隔を固定的に設定し、境界線637,638の位置を、足置台211,212の位置変化に同期させて変化させる。図9において、上下に並ぶバーグラフ63は、図4(C)に示したバーグラフ63と同様に総荷重に対する左右の各荷重の割合を示している。また、上下に隣接するバーグラフ63は一定の時間間隔で異なる時刻(t1〜t9)に対応している。
【0113】
さらに、図9に示す例では、分割線632に対応する部位にマーカ636に代えて、足置台211,212の位置を示す位置マーク639を表示している。位置マーク639は、マーカ636と同様に円形などの形状で示す。図示例では、図9の左部に示しているように、位置マーク639が指標633に対して右側であるときには右足の底屈を示し、位置マーク639が指標633に対して左側であるときには右足の背屈を示す。また、左足の底屈および背屈は右足とは逆の関係になる。
【0114】
目標値を示す境界線637,638の位置は、足置台211,212の変位に伴う荷重の変化の望ましい範囲を挟むように設定される。したがって、使用者は、マーカ636が境界線637,638の間に位置するように意識して運動を行うことにより、平衡感覚を向上させることができる。なお、図示例では、足置台211,212の変位に伴う底屈の際に目標値が大きくなり、背屈の際に目標値が小さくなる場合を示している。
【0115】
上述の例では、目標値を境界線637,638によって示しているが、目標値の表示方法は適宜に選択することができる。たとえば、目標値を範囲で表すのではなく、1つの目標値のみを設定し、目標値を示す位置にマーカ636と同様の形状である円形のポイントを置いてもよい。この場合、マーカ636とポイントとは色あるいは大きさを異ならせて識別できるようにしておくことが望ましい。この場合、使用者は目標値を示すポイントの位置にマーカ636を近づけるように体重移動を行うように運動すればよい。
【0116】
上述の例では、底屈に対して目標値を大きくし、背屈に対して目標値を小さくしているが、逆に底屈に対して目標値を小さくし、背屈に対して目標値を大きくすれば、難易度の高い運動が可能になる。また、目標値を足置台211,212の変位に同期させて規則的に変化させるのではなく、不規則に目標値を変更すれば、より難易度が高まり、運動にゲーム性を付加することになる。
【0117】
さらに、図9においてバーグラフ63の左側に並べて示しているように、足置台211,212の位置情報を各バーグラフ63に対応付けて表示器532に表示すると、使用者に意識付けができ、運動効果が高まることが期待できる。
【0118】
ただし、図9に示す表示内容を表示器532に表示すると、画面内でバーグラフ63の占有領域が狭くなる。この場合、足置台211,212の位置情報をバーグラフ63の中に位置マーク639のみで示すようにしてもよい。すなわち、図の左部に示した足の位置の図形を表示器532には表示せず、表示器532の画面にバーグラフ63のみを表示してもよい。また、図10に示す例のように、目標値を示す境界線637,638を省略することもできる。
【0119】
上述のように、位置マーク639を用いて底屈および背屈の状態を分割線632とともにバーグラフ63に示すことにより、使用者は足置台211,212の変位に追従して体重移動を行っているか否かを容易に確認することができる。
【0120】
上述の構成では、左右の足をそれぞれ載せる一対の足置台を設けるとともに、各足置台にそれぞれ荷重センサを設けた構成を採用している。ただし、両足を載せる1個の足置台を設け、足置台に作用する荷重を検出する荷重センサと、足置台の傾斜角度を検出する傾きセンサとを組み合わせて用いることにより、左右の足にそれぞれ作用する荷重を算出する構成を採用してもよい。
【符号の説明】
【0121】
30 駆動手段
31 モータ(駆動源)
53 表示手段
54 目標設定手段
61 バーグラフ
62 バーグラフ
63 バーグラフ
211 足置台
212 足置台
511 力検出手段
512 力検出手段
522 バランス評価手段
523 報知手段
524 履歴記憶手段
525 比較手段
610 基準線
611,612 バー
620 基準線
621 バー
631 バー
【特許請求の範囲】
【請求項1】
左右の足をそれぞれ載せる一対の足置台と、駆動源を備え前記各足置台を変位させる駆動手段と、前記各足置台に作用する力をそれぞれ検出する力検出手段と、前記力検出手段が検出した力から求められる力評価量を表示する表示手段とを備えることを特徴とする他動運動機器。
【請求項2】
前記力評価量は前記各足置台にそれぞれ作用する力であって、前記表示手段は前記力評価量をグラフにして表示することを特徴とする請求項1記載の他動運動機器。
【請求項3】
前記力評価量は前記両足置台に作用する力の総量に対する前記各足置台にそれぞれ作用する力の割合であって、前記表示手段は、前記力評価量をグラフにして表示することを特徴とする請求項1記載の他動運動機器。
【請求項4】
前記力評価量は前記各足置台にそれぞれ作用する力の差であって、前記表示手段は、前記力評価量をグラフにして表示することを特徴とする請求項1記載の他動運動機器。
【請求項5】
前記力評価量は前記両足置台に作用する力の総量に対する前記各足置台にそれぞれ作用する力の割合であって、前記表示手段は、前記総量を表す図形を前記力評価量に応じた割合で分割するグラフにして前記力評価量を表示することを特徴とする請求項1記載の他動運動機器。
【請求項6】
前記表示手段は、前記グラフとして左右方向のバーの長さで前記力評価量を表すバーグラフを用いることを特徴とする請求項2〜4のいずれか1項に記載の他動運動機器。
【請求項7】
前記表示手段は、前記力評価量について、左側の成分を左向きに表示し、右側の成分を右向きに表示することを特徴とする請求項6記載の他動運動機器。
【請求項8】
前記力検出手段により検出された左右の力の差が規定の範囲内か否かを報知する報知手段を備えることを特徴とする請求項1〜7のいずれか1項に記載の他動運動機器。
【請求項9】
前記力検出手段により検出された左右の力の分布を評価するバランス評価手段を備え、前記バランス評価手段による評価結果を前記表示手段に表示することを特徴とする請求項1〜8記載の他動運動機器。
【請求項10】
前記力検出手段により検出された力の履歴を記憶する履歴記憶手段を備え、前記表示手段は前記履歴記憶手段に記憶された履歴を表示することを特徴とする請求項1〜9のいずれか1項に記載の他動運動機器。
【請求項11】
前記力検出手段により検出される力をあらかじめ設定した目標値と比較する比較手段を備え、前記表示手段は、前記比較手段による比較結果を表示する機能を備えることを特徴とする請求項1〜10のいずれか1項に記載の他動運動機器。
【請求項12】
前記比較手段に与える前記目標値を設定する目標設定手段を備えることを特徴とする請求項11記載の他動運動機器。
【請求項13】
前記表示手段は、前記足置台の位置情報を表示することを特徴とする請求項1〜12のいずれか1項に記載の他動運動機器。
【請求項1】
左右の足をそれぞれ載せる一対の足置台と、駆動源を備え前記各足置台を変位させる駆動手段と、前記各足置台に作用する力をそれぞれ検出する力検出手段と、前記力検出手段が検出した力から求められる力評価量を表示する表示手段とを備えることを特徴とする他動運動機器。
【請求項2】
前記力評価量は前記各足置台にそれぞれ作用する力であって、前記表示手段は前記力評価量をグラフにして表示することを特徴とする請求項1記載の他動運動機器。
【請求項3】
前記力評価量は前記両足置台に作用する力の総量に対する前記各足置台にそれぞれ作用する力の割合であって、前記表示手段は、前記力評価量をグラフにして表示することを特徴とする請求項1記載の他動運動機器。
【請求項4】
前記力評価量は前記各足置台にそれぞれ作用する力の差であって、前記表示手段は、前記力評価量をグラフにして表示することを特徴とする請求項1記載の他動運動機器。
【請求項5】
前記力評価量は前記両足置台に作用する力の総量に対する前記各足置台にそれぞれ作用する力の割合であって、前記表示手段は、前記総量を表す図形を前記力評価量に応じた割合で分割するグラフにして前記力評価量を表示することを特徴とする請求項1記載の他動運動機器。
【請求項6】
前記表示手段は、前記グラフとして左右方向のバーの長さで前記力評価量を表すバーグラフを用いることを特徴とする請求項2〜4のいずれか1項に記載の他動運動機器。
【請求項7】
前記表示手段は、前記力評価量について、左側の成分を左向きに表示し、右側の成分を右向きに表示することを特徴とする請求項6記載の他動運動機器。
【請求項8】
前記力検出手段により検出された左右の力の差が規定の範囲内か否かを報知する報知手段を備えることを特徴とする請求項1〜7のいずれか1項に記載の他動運動機器。
【請求項9】
前記力検出手段により検出された左右の力の分布を評価するバランス評価手段を備え、前記バランス評価手段による評価結果を前記表示手段に表示することを特徴とする請求項1〜8記載の他動運動機器。
【請求項10】
前記力検出手段により検出された力の履歴を記憶する履歴記憶手段を備え、前記表示手段は前記履歴記憶手段に記憶された履歴を表示することを特徴とする請求項1〜9のいずれか1項に記載の他動運動機器。
【請求項11】
前記力検出手段により検出される力をあらかじめ設定した目標値と比較する比較手段を備え、前記表示手段は、前記比較手段による比較結果を表示する機能を備えることを特徴とする請求項1〜10のいずれか1項に記載の他動運動機器。
【請求項12】
前記比較手段に与える前記目標値を設定する目標設定手段を備えることを特徴とする請求項11記載の他動運動機器。
【請求項13】
前記表示手段は、前記足置台の位置情報を表示することを特徴とする請求項1〜12のいずれか1項に記載の他動運動機器。
【図1】



【図2】

【図3】

【図4】

【図5】

【図6】

【図7】

【図8】

【図9】

【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−75587(P2012−75587A)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2010−222454(P2010−222454)
【出願日】平成22年9月30日(2010.9.30)
【出願人】(000005821)パナソニック株式会社 (73,050)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成22年9月30日(2010.9.30)
【出願人】(000005821)パナソニック株式会社 (73,050)
[ Back to top ]