
分析システムにおける対象物の選択的保持/開放のための装置
【課題】分析システムにおける対象物の選択的保持/開放のための装置を提供する。
【解決手段】分析システムにおける対象物の選択的保持/開放のための装置が開示されている。
その装置は、対応する対をなす軸に対して回転可能に取付けられている第1、第2アームアセンブリにより構成する。それぞれのアームアセンブリは、それぞれの軸に対して互いに反対側に配置された対象物保持端部と磁気端部とを含む。磁気駆動部は、保持端部がそれらの間に保持されている対象物の配置を可能とするために互いに末端にあるという開放状態と、保持端部が直近の対象物を操作する閉鎖状態との間で、それぞれの軸に対して第1、第2アームアセンブリの磁気端部の回転を磁気的に誘発するようにしている。
装置は、試験管、ガラス瓶、顕微鏡スライドなどのように、様々な対象物を受け保持することができるようになっている。

【解決手段】分析システムにおける対象物の選択的保持/開放のための装置が開示されている。
その装置は、対応する対をなす軸に対して回転可能に取付けられている第1、第2アームアセンブリにより構成する。それぞれのアームアセンブリは、それぞれの軸に対して互いに反対側に配置された対象物保持端部と磁気端部とを含む。磁気駆動部は、保持端部がそれらの間に保持されている対象物の配置を可能とするために互いに末端にあるという開放状態と、保持端部が直近の対象物を操作する閉鎖状態との間で、それぞれの軸に対して第1、第2アームアセンブリの磁気端部の回転を磁気的に誘発するようにしている。
装置は、試験管、ガラス瓶、顕微鏡スライドなどのように、様々な対象物を受け保持することができるようになっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、概略的に、サンプルの化学的および/または生物学的特質を提供し、分析するために用いられる装置の改善に向けられている。さらに特別には、本発明は、分析システムにおける対象物の選択的保持/開放のための装置の改善に向けられている。
【背景技術】
【0002】
資料の化学的および/または生物学的特質の分析において、また資料調合において用いられる装置は、様々な形態をとる。これらの多様性に係らず、これらの装置の大部分は、システムにおいて移送されたり、同様に操作されたりするとき、例えばスライド、試験管等、対象物を選択的に保持するように設計された通常のメカニズムを含んでいる。
【0003】
このような装置のうちの一つは、ガオらによる、USP.NO.5,804145において明らかにされている。その特許は、顕微鏡スライド上の血液標本を形成するための装置に向けられている。
血液標本を作成する過程において、顕微鏡スライドは、スライドトラックにより受止められ、運ばれる。そのトラックは、その底部表面として、スライド受プラットフォームを有するボディ部材からなる。そのプラットフォームは、真空ポートとつながるように形成された凹部を有している。プラットフォームが顕微鏡スライドから近接して配置されている間、真空がそのポートに与えられると、そのスライドは、真空圧により、プラットフォームに対向して、引っ張られ、保持される。スライドを運ぶそのトラックは、血液がスライド表面を横切って塗られるとき、予め決められた通路に沿って動く。
【0004】
血液分析のための他の装置としては、カナモリらによる、USP.NO.5209903に開示されている。この特許は、プログラマブルコントローラの制御下に配置される自動血液材料出力機と、血液分析器を通して、血液のサンプルの取り扱い搬送のためのコンベアを含む。
その装置の分野に従って、プリンタは、それぞれのスライドの独一の識別子をプリントすることに使用される。つまりは、プリンタのプリンタヘッドは、スライドがガイドプレートで支えられるとき、直接スライド上に配置される。そのガイドプレートは、その識別コードがそれらの上に、印刷されるときに、一時にプリンタの下にスライドを進める。
ホルダは、印刷プロセスの際に、スライドを保持するのに用いられる。そのホルダは、通常の支持に回動自在に取り付けられている一対のアームを具備する。それらのアームは、互いに接近離反するべく回転するように配置され、空圧源と接続しているピストンにより操作される。それぞれのアームから延びる突出部は、識別コードがプリントされる間、ガイドプレートに対向して、スライドを確実に保持するために、スライドの反対側端部と交差する。
【0005】
自動化学分析機において用いられる装置は、ブリーザーらによる、USP.NO.5882596によって開示されている。この特許では、可動反応容器として使用され得る、試験管のような、分析器において分析資源、往復容器を開示している。
その往復手段は、進行中に、搬送されるプレートの対応する実質的な動きなしに、直線状通路に沿って、反応容器を順次、段階的に進行することに関しては、協同して動くように適用した、複数の可動プレートを有する。
【0006】
前述の装置は、テスト対象物の望ましい把持、搬送および/または操作を実行するために、圧空源および/または複合機構構成を使用する。
圧空源を採用した装置において、分離した空圧/真空システムは、それによって全体コストの増大と装置の複雑化を招いている。
同様に、複合機構構成は、信頼性の低下故に所有コストと共に製造コストも増大する。
従って、分析システムにおける対象物の選択的保持/開放のための装置では、より機構的に簡略化され、単純化された操作要求は、多くの場合において望ましい。
【発明の開示】
【発明が解決しようとする課題】
【0007】
分析システムにおいて、対象物の選択的保持/開放のための装置が開示されている。その装置は、対応する一対の軸に対して回転可能に取付けられている、第1、第2のアームアセンブリを具備する。それぞれのアームアセンブリは、それぞれの軸に対して互いに反対に配置された対象物保持端部と磁気的端部とを含む。磁気駆動部は、保持端部が、それらの間に保持される対象物の配置を許容する末端である開放した状態と、保持端部が直近の対象物を操作する閉じた状態との間で、それぞれの軸に対して第1、第2アームアセンブリの磁気端部の回転を磁力的に引き起こすように構成されている。
その装置は、様々な対象物、例えば試験管、薬瓶、顕微鏡スライドなどを受け入れ、保持することに容易に適用し得る。
【発明を実施するための最良の形態】
【0008】
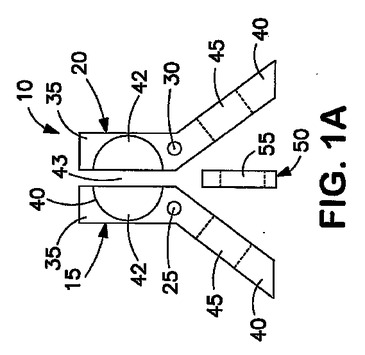
図1Aないし図1Dは、一つの分析システムにおける、対象物の選択的保持/開放のための装置の一つの実施形態を示している。
この10で示す装置の特別な形態では、ガラス瓶や試験管のような容器を保持するようにしている。しかしながら、その装置は、同様に、異なったタイプの対象物も容易に保持できることが諒解されよう。
【0009】
その装置10は、第1のアームアセンブリ15と、互いに反対方向に配置される、第2のアームアセンブリ20とを含む。図示した実施形態において、第1、第2アームアセンブリ15,20は鏡像のように形成されている。それぞれのアームアセンブリ15,20は、それぞれ、軸25,30としてここで示されるように、対応する回転軸に対して回転可能に取付けられている。軸25,30は好ましくは適当な間隔を空けてあり、互いに略平行である。それぞれの軸25,30は、それぞれのアームアセンブリ15,20を支える対応する回転ロッドを中心としている。
【0010】
概略説明したように、それぞれのアームアセンブリ15,20は、対象物保持端部35と、対応する回転軸の反対側に配置される磁気端部40とを含む。それぞれの対象物保持端部35は、少なくとも部分的にそれを通して展開する弧状の開口部42を有する。
その弧状の開口部42は、アーム15,20が、図1Aにおいて示される対象物保持ポジションにあるとき、容器保持ポケット43を互いに形成するようにしている。
容器保持ポケット43の形状は、装置10により保持され、移送されるべき容器の特別なタイプの外形に対応している。
【0011】
それぞれのアームアセンブリ15の磁気端部40は、磁場を形成するための少なくとも一つかそれ以上の構造物と回路とを含む。好ましい構成において、それぞれの磁気端部40は、永久磁石45を具備している。図示しているように、永久磁石45は、それぞれの磁気端部40のおおよそ同じ位置に取付けられている。図示された形態において、永久磁石45の極は、磁気端部40が互いに引付け合うように方向付けられている。すなわち、一つのアームアセンブリの磁気端部40における永久磁石45は、北極が直接的に反対であり、他のアームアセンブリの磁気端部40における永久磁石45の南極に向き合うように方向付けられている。
【0012】
磁気駆動部50は、それぞれの回転軸25,30に対し磁気端部40の回転を、磁力によって引き起こすようにしている。その図示された実施態様において、磁気駆動部50は、磁気エレメント55と機械的または空圧駆動部60とを含む。その駆動部60は、磁気エレメント55がアームアセンブリ15,20の磁気端部40における永久磁石45間に介在されている第1のポジションと、磁気エレメント55がその永久磁石45間から取り払われた第2のポジション間で、磁気エレメント55を動かす。
第1ポジションは、図1A,1Bで示され、一方第2ポジションは、図1C,1Dで示されている。図1A,1Bで示されるように、磁気エレメント55の磁極は、その磁気エレメント55が第1ポジションにもたらされる時に磁気エレメント55から永久磁石45を反発させるように方向付けられる。磁気的反発力によって生じる力は、磁気端部40を互いに対応する軸25,30に対し回転させる要因となる。次いで、保持端部35は、容器保持ポケット43を形成するように互いに接近回転する。
【0013】
磁気駆動部50は、装置10により保持され、移送されるべき対象物が、保持端部35間にもたらされている間に、容器保持ポケット43を形成するように操作することができる。その代わりに、装置10により保持され、移送されるべき対象物は、保持端部35が互いに近づくように回転させられ、そのポケット43が形成された後に、容器保持ポケット43内に置かれる。
【0014】
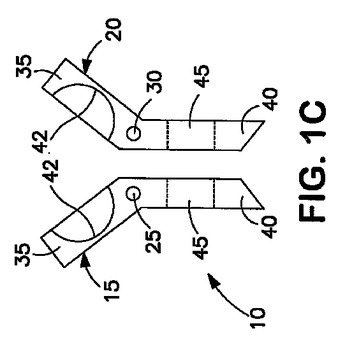
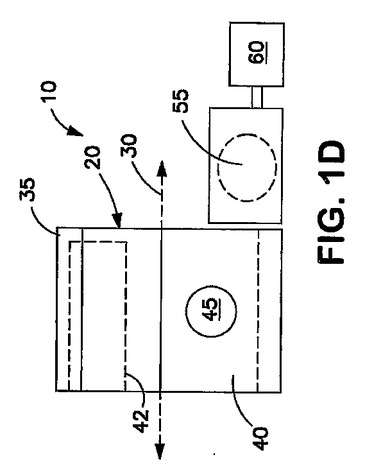
上述したように、図1C,1Dは、駆動部60が磁気エレメント55を第2ポジションに動かす際に装置10の振舞いを示している。
このポジションにおいて、磁気エレメント55は、磁気端部40の永久磁石45間から実質的に開放される。それ故、永久磁石45の極は、互いに引き合うように方向付けられ、対応する吸引力は、磁気端部40を互いに向かうように引っ張り、これにより、保持端部35を、軸25,30回りに、互いに引き離すように対応する回転を引き起こす。このポジションにおいて、装置10により保持され、操作される対象物は、保持端部35間にもたらされるか、保持端部35間から取り除かれる。
【0015】
図1A〜1Dで示しているように、装置10の構造および操作は、保持端部35を、開放ポジションに付勢する吸引状態に向けられる永久磁石45の磁極によって説明した。
しかしながら、永久磁石45の磁極は、また、図1A,1Bに示している閉じたポジションに保持端部35を付勢する反発状態に自然に方向付けられ得ることも諒解されよう。
そのような場合、磁気エレメント55が永久磁石45間にあるとき、磁気エレメント55の極は、永久磁石45が磁気エレメント55に向かって引き付けられるように方向付けられる。
【0016】
装置10の更なる異なった態様に従っていえば、駆動部60は、所望の磁気吸引力、反発力を生み出すために、磁気エレメント55を回転するように構成することもできる。
このような場合、磁気エレメント55は、磁気端部40間に配置され、第1、第2の角度ポジション間を回転する。第1の角度ポジションにおいて、磁気エレメント55は、その磁極が磁気端部40を反発するような角度に回転され、それにより、対象物保持端部35を互いに閉じた状態に動かされる。
第2の角度ポジションにおいては、磁気エレメント55は、その磁極が磁気端部40を引き付けるような角度に回転され、それにより対象物保持端部35を互いに離れるように動かして開いた状態に動かされる。
【0017】
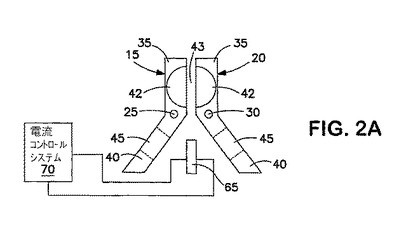
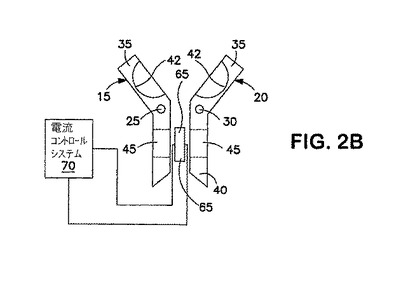
図2A,2Bは、図1A〜1Dで示した装置10の別の態様の実施形態を示している。
図2A,2Bにおける実施形態において、磁気エレメント55と駆動部60は、電磁石65と対応する電流コントロールシステム70とによって置き換えられている。
この実施態様では、少なくとも二つの異なった方法で操作される。
第1に、電流コントロールシステム70によってもたらされる電流の存否は、装置10が開いているか閉じているかを決定付けるために用いられる。
次に、電流コントロールシステム70は、例えば、永久磁石45を、互いに反発するように、あるいは直接保持端部35を、閉じた状態にもたらすように、電磁石65を通して電流を供給するように用いられる。
保持端部35は、電磁石65から単に電流を遮断することによって開放状態にもたらされ、永久磁石45の吸引磁気力によって互いに磁気端部40を引き付けるようにすることができる。
第2には、電流コントロールシステム70によりもたらされる電流の方向は、装置10の開閉状態を制御するのに用いられる。後者の場合には、電流コントロールシステム70は、互いに永久磁石45を反発させる最初の方向に、電磁石65を通して電流を供給し、そしてそれにより保持端部35を互いに近づけるように操作して閉じた状態とされる。電流コントロールシステム70によって供給される電流は、互いに永久磁石45に対して極を反転し、それにより、保持端部35を互いに離れるように操作して開放状態とされる。
それぞれの場合において、電流コントロールシステム70の操作は、プログラマブルコンピュータのコントロール下に稼動される。
【0018】
図3A〜3Eと、図4A〜4Eは、本発明の着想に従って構築された分析システムにおいて、対象物を選択的に保持したり開放したりするための装置の他の実施形態を示している。
これらの図に示された実施形態では、特に分析ユニットにおける顕微鏡スライドを移動させるために適応させている。前述したように、その装置は、図3Aと図4Aにおける75は、キャリッジ駆動部85上に取付けられたスライドキャリッジアセンブリ80を含む。
キャリッジ駆動部85とキャリッジアセンブリ80は、キャリッジ駆動部85が分析ユニット内において複数のポジション間でキャリッジアセンブリ80を移動できるように結合している。キャリッジ駆動部85は、同様に、分析ユニット内において様々なポジション間で操作されるべくキャリッジアセンブリ80を回転するようにしている。図示された実施形態で使用のために変形し得るキャリッジドライブは、すでにつまびらかにされた特許USP.NO.5209903、USP.NO.582596において開示されている。キャリッジドライブの他の形態もさらに用いることもできる。
【0019】
スライドキャリッジアセンブリ80は、アセンブリ80の様々な部品に対する初期のサポートとして作用する取付フレーム95を含む。取付フレーム95の下方部位は、アセンブリ80をキャリッジ駆動部85に結合するために用いられるベースエレメント100として規定される。一対の起立した端部材105は、ベースエレメント100とスライド取付ベッド110の端部から延在している。取付ベッド110は、分析システムにおいて移載され、同様に操作された顕微鏡スライド115のための初期のサポートエレメントとして機能している。取付ベッド110は顕微鏡スライド115の幅より小さい。ノッチ117は、取付ベッド110とスライド115の端部近傍の中央線に指向して展開している。
【0020】
一対の回転軸120は、端部材105間に延在している。回転軸120は、互いに平行に、好ましくは同じ高さに吊っている。それぞれの回転軸は、対応するアームアセンブリ125を支えている。隙間エレメント130は、それぞれの回転軸120に沿って、それぞれのアームアセンブリ125の長手方向の動きを規定している。好ましくは、アームアセンブリ125は、それぞれの回転軸120に対して互いに直接対向するように、同じ長手方向に配列されている。
【0021】
それぞれのアームアセンブリ125は、保持端部135と、対応する回転軸120の反対側側部に配置している磁気端部140とを含む。それぞれの回転軸120の中央は、このように対応するアームアセンブリ125の回転軸として規定している。それぞれの回転軸120は、対応するアームアセンブリ125の横梁145における中央に配列される開口を通して延在している。
【0022】
それぞれのアームアセンブリ125の保持端部135は、対応する横梁145から立ち上がる一対のグリップアーム150を含んでいる。それぞれのグリップアーム150は、端部に溝155を形成している。ノッチ117は、グリップアーム150を受けるように配置している。グリップアーム150が、図3A〜3Eに示しているように、保持状態にあるとき、溝155の内表面は、溝155の上下表面がスライド115の鉛直方向の動きを規制する一方、取付ベッド110上のスライド115水平方向の動きを規制している。
【0023】
それぞれのアームアセンブリ125の磁気端部140は、横梁145に結合する第1の端部と磁気ハウジング170に連結する第2の端部とを有する横方向の梁160を含む。 それぞれの磁気ハウジング170は、対応する永久希土酸化物磁石175を支えている。
【0024】
図示された実施形態において、磁石175は、図3A〜3Eにおいて示されている、開放状態に、自動的にグリップアーム150が付勢するように取り付けられている。この開放状態において、顕微鏡スライド115は、容易に取付ベッド110に載置したり、取り除いたりすることができる。つまり、一つのアームアセンブリ125の磁石175は、他のアームアセンブリ125のハウジング170に取付けられている磁石175の北極が直接南極に面するように、ハウジング170に取付けられている。
【0025】
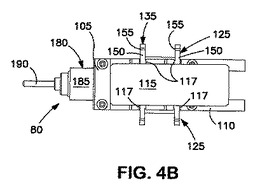
180で示している磁気駆動部アセンブリは、それぞれの回転軸120に対して磁気端部140を回転させるのに利用され、それによりグリップアーム150を、図4A〜4Eで示される開放状態と図3A〜3Eで示される閉止状態との間で、回転させるのに利用される。
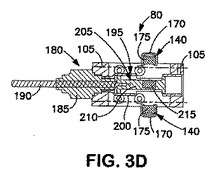
磁気駆動部アセンブリ180は、端部材105の一つに取付けられた、リニアステッパモータのような、駆動モータ185を含む。そのモータ185は、少なくとも端部材105のうちの一つにより、同様に支えられた磁気ピストンアセンブリ195を操作するのに用いられるドライブロッド190を含む。その磁気ピストンアセンブリ195は、往復運動磁気ピストン205を少なくとも部分的に取り囲むハウジング200を含む。
特に図3D,4Dにおいて示されるように、磁気ピストン205は非磁性素材とボディ部材210により支えられる永久磁気部分215によって形成されるボディ部材210から構成されている。永久磁気部分210の磁極は、磁気部分210が永久磁石175間に位置されるとき、磁気端部140の永久磁石175が分離操作されるように、方向付けられる。
【0026】
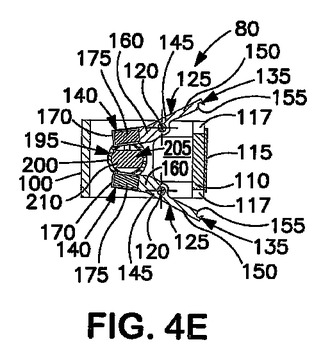
操作において、モータ185とドライブロッド190は、先ず、図4D,4Eに示されるポジションに、磁気ピストン205を向ける。このポジションにおける磁気ピストン205によって、永久磁気部分210は、アームアセンブリ125の永久磁石175間に、直接的にその領域から退避される。これにより磁気端部140が互いに回転する。この回転動作により、対応するグリップアーム150が取付ベッド110から離れるように回転することになる。
この開放状態において、顕微鏡スライド115は、取付ベッド110に容易に載置され、あるいは取外すことができる。この状態は図4A〜4Cにまた図示されている。
【0027】
一旦、顕微鏡スライド115は、取付ベッド110に載置されると、モータ185とドライブロッド190は、図3D,3Eに示されるポジションに、磁気ピストン205を向ける。このポジションにおける磁気ピストン205をもって、永久磁気部分210は、アームアセンブリ125の永久磁石175間に、直接的にその領域内に配置され、これにより磁気端部140が互いに離れるように回転する。この回転動作により、対応するグリップアーム150が取付ベッド110に向けて回転することになる。この閉じた状態において、顕微鏡スライド115は、取付ベッド110で固定され、スライドキャリッジドライブ85は、スライドキャリッジアセンブリ80を自在に動かすことができる。この状態は、特に、図3A〜3Cにまた図示されている。
【0028】
この第2実施形態は、装置内の様々な磁石の方向付けによって説明してきた。この方向付けにおいて、グリップアーム150は、自動的に開放ポジションにもたらされ、永久磁気部分215が磁気端部140間の領域に移動する際に、閉じたポジションにもたらされる。しかしながら、グリップアーム150の閉止ポジションへの自然な移行は、装置75における様々な磁極の方向付けを単に切り換えることにより、容易になし得るということが諒解されよう。後者の場合、グリップアーム150は、永久磁気部分215が磁気端部140間の領域に移動した際に、開放ポジションにもたらされることになる。
【0029】
第1と第2実施形態では、磁石175に磁気部分215を交互に、間にもたらしたり、離したり操作するためのリニアステッパモータ185を示した。それはまた、モータ185は、磁石175間に位置する間、磁気部分215を回転させるロータリモータであるべきである。同様に、磁石175は、磁石175の磁極に関して磁気部分215の磁極の方向付けに基づく磁気部分215に対し近接/離間するように操作される。
【0030】
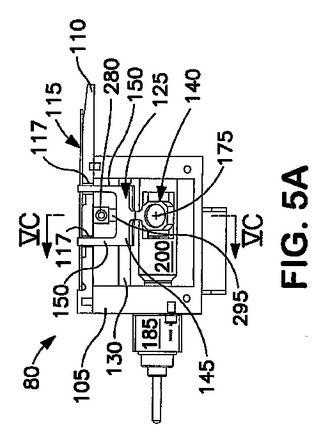
図5A〜5Cは、装置80に対する空間調整機構275の付加を示している。空間調整機構275は、少なくとも一つのグリップアーム150が、装置80が閉止状態にあるときの移動距離を決定するものである。言い換えれば、この移動距離は、スライド115がグリップアーム150間に保持されるとき、スライド115は、取付ベッド110上にあるとみなす横方向のポジションを決定付けるものである。そのような調整は、スライドを、プリンティングや被検材料のように様々な操作において、最適の状態に位置させることを許容している。
【0031】
図示された実施形態において、空間調整機構275は、取付ベッド110の下側側部の拡張ブロック290において、螺刻された開口部285を通して拡張する調整螺子280を含む。ストップ部材295は、横梁145から張り出し、装置80の第1の側部のグリップアーム150間から展開する。そのストップ部材295と調整螺子280の端部は、装置80が図5Cにおいて示される閉止状態に操作されるとき、互いに当接する。この状態において、ストップメンバー295に関連するグリップアーム150の移動は、スライド115が、装置80サイドにもたらされるポジションとして規定された故に、調整螺子280の端部のポジションによって制限される。
好ましくは、装置80の反対サイドにおけるグリップアーム115は、取付ベッド110上の適切なポジションにスライド115を推し進めるために、対応する溝117に自由に装入させることができる。
【0032】
前述のシステムから、それの基本的な着想から離れることなしに、多くの変形が可能である。本発明は、一つないし二つの特別な実施形態に関して詳細に説明したが、その技術事項は、添付されたクレームにおいて開示しているように、本発明の目的思想から離れることなしに変更が可能であることが諒解されよう。
【図面の簡単な説明】
【0033】
【図1A】試験管、薬瓶などの対象物を選択的に保持/解放するように適応させている本発明の第1実施形態における模式的図である。
【図1B】試験管、薬瓶などの対象物を選択的に保持/解放するように適応させている本発明の第1実施形態における模式的図である。
【図1C】試験管、薬瓶などの対象物を選択的に保持/解放するように適応させている本発明の第1実施形態における模式的図である。
【図1D】試験管、薬瓶などの対象物を選択的に保持/解放するように適応させている本発明の第1実施形態における模式的図である。
【図2A】電磁石が開放/閉鎖状態間で、装置を操作するように用いられる、図1A〜1Dで示した第1の実施形態の変形例にかかる模式的図である。
【図2B】電磁石が開放/閉鎖状態間で、装置を操作するように用いられる、図1A〜1Dで示した第1の実施形態の変形例にかかる模式的図である。
【図3A】顕微鏡スライドを選択的に保持/解放するように適応させ、その閉鎖状態における実施形態を示した、本発明の第2実施形態における模式的図である。
【図3B】顕微鏡スライドを選択的に保持/解放するように適応させ、その閉鎖状態における実施形態を示した、本発明の第2実施形態における模式的図である。
【図3C】顕微鏡スライドを選択的に保持/解放するように適応させ、その閉鎖状態における実施形態を示した、本発明の第2実施形態における模式的図である。
【図3D】顕微鏡スライドを選択的に保持/解放するように適応させ、その閉鎖状態における実施形態を示した、本発明の第2実施形態における模式的図である。
【図3E】顕微鏡スライドを選択的に保持/解放するように適応させ、その閉鎖状態における実施形態を示した、本発明の第2実施形態における模式的図である。
【図4A】開放状態における本発明の第2実施形態の模式的図である。
【図4B】開放状態における本発明の第2実施形態の模式的図である。
【図4C】開放状態における本発明の第2実施形態の模式的図である。
【図4D】開放状態における本発明の第2実施形態の模式的図である。
【図4E】開放状態における本発明の第2実施形態の模式的図である。
【図5A】調整機構はその閉じた状態における装置の保持端部間の隙間を設定するようにした本発明の第2の実施形態の模式的図である。
【図5B】調整機構はその閉じた状態における装置の保持端部間の隙間を設定するようにした本発明の第2の実施形態の模式的図である。
【図5C】調整機構はその閉じた状態における装置の保持端部間の隙間を設定するようにした本発明の第2の実施形態の模式的図である。
【技術分野】
【0001】
本発明は、概略的に、サンプルの化学的および/または生物学的特質を提供し、分析するために用いられる装置の改善に向けられている。さらに特別には、本発明は、分析システムにおける対象物の選択的保持/開放のための装置の改善に向けられている。
【背景技術】
【0002】
資料の化学的および/または生物学的特質の分析において、また資料調合において用いられる装置は、様々な形態をとる。これらの多様性に係らず、これらの装置の大部分は、システムにおいて移送されたり、同様に操作されたりするとき、例えばスライド、試験管等、対象物を選択的に保持するように設計された通常のメカニズムを含んでいる。
【0003】
このような装置のうちの一つは、ガオらによる、USP.NO.5,804145において明らかにされている。その特許は、顕微鏡スライド上の血液標本を形成するための装置に向けられている。
血液標本を作成する過程において、顕微鏡スライドは、スライドトラックにより受止められ、運ばれる。そのトラックは、その底部表面として、スライド受プラットフォームを有するボディ部材からなる。そのプラットフォームは、真空ポートとつながるように形成された凹部を有している。プラットフォームが顕微鏡スライドから近接して配置されている間、真空がそのポートに与えられると、そのスライドは、真空圧により、プラットフォームに対向して、引っ張られ、保持される。スライドを運ぶそのトラックは、血液がスライド表面を横切って塗られるとき、予め決められた通路に沿って動く。
【0004】
血液分析のための他の装置としては、カナモリらによる、USP.NO.5209903に開示されている。この特許は、プログラマブルコントローラの制御下に配置される自動血液材料出力機と、血液分析器を通して、血液のサンプルの取り扱い搬送のためのコンベアを含む。
その装置の分野に従って、プリンタは、それぞれのスライドの独一の識別子をプリントすることに使用される。つまりは、プリンタのプリンタヘッドは、スライドがガイドプレートで支えられるとき、直接スライド上に配置される。そのガイドプレートは、その識別コードがそれらの上に、印刷されるときに、一時にプリンタの下にスライドを進める。
ホルダは、印刷プロセスの際に、スライドを保持するのに用いられる。そのホルダは、通常の支持に回動自在に取り付けられている一対のアームを具備する。それらのアームは、互いに接近離反するべく回転するように配置され、空圧源と接続しているピストンにより操作される。それぞれのアームから延びる突出部は、識別コードがプリントされる間、ガイドプレートに対向して、スライドを確実に保持するために、スライドの反対側端部と交差する。
【0005】
自動化学分析機において用いられる装置は、ブリーザーらによる、USP.NO.5882596によって開示されている。この特許では、可動反応容器として使用され得る、試験管のような、分析器において分析資源、往復容器を開示している。
その往復手段は、進行中に、搬送されるプレートの対応する実質的な動きなしに、直線状通路に沿って、反応容器を順次、段階的に進行することに関しては、協同して動くように適用した、複数の可動プレートを有する。
【0006】
前述の装置は、テスト対象物の望ましい把持、搬送および/または操作を実行するために、圧空源および/または複合機構構成を使用する。
圧空源を採用した装置において、分離した空圧/真空システムは、それによって全体コストの増大と装置の複雑化を招いている。
同様に、複合機構構成は、信頼性の低下故に所有コストと共に製造コストも増大する。
従って、分析システムにおける対象物の選択的保持/開放のための装置では、より機構的に簡略化され、単純化された操作要求は、多くの場合において望ましい。
【発明の開示】
【発明が解決しようとする課題】
【0007】
分析システムにおいて、対象物の選択的保持/開放のための装置が開示されている。その装置は、対応する一対の軸に対して回転可能に取付けられている、第1、第2のアームアセンブリを具備する。それぞれのアームアセンブリは、それぞれの軸に対して互いに反対に配置された対象物保持端部と磁気的端部とを含む。磁気駆動部は、保持端部が、それらの間に保持される対象物の配置を許容する末端である開放した状態と、保持端部が直近の対象物を操作する閉じた状態との間で、それぞれの軸に対して第1、第2アームアセンブリの磁気端部の回転を磁力的に引き起こすように構成されている。
その装置は、様々な対象物、例えば試験管、薬瓶、顕微鏡スライドなどを受け入れ、保持することに容易に適用し得る。
【発明を実施するための最良の形態】
【0008】
図1Aないし図1Dは、一つの分析システムにおける、対象物の選択的保持/開放のための装置の一つの実施形態を示している。
この10で示す装置の特別な形態では、ガラス瓶や試験管のような容器を保持するようにしている。しかしながら、その装置は、同様に、異なったタイプの対象物も容易に保持できることが諒解されよう。
【0009】
その装置10は、第1のアームアセンブリ15と、互いに反対方向に配置される、第2のアームアセンブリ20とを含む。図示した実施形態において、第1、第2アームアセンブリ15,20は鏡像のように形成されている。それぞれのアームアセンブリ15,20は、それぞれ、軸25,30としてここで示されるように、対応する回転軸に対して回転可能に取付けられている。軸25,30は好ましくは適当な間隔を空けてあり、互いに略平行である。それぞれの軸25,30は、それぞれのアームアセンブリ15,20を支える対応する回転ロッドを中心としている。
【0010】
概略説明したように、それぞれのアームアセンブリ15,20は、対象物保持端部35と、対応する回転軸の反対側に配置される磁気端部40とを含む。それぞれの対象物保持端部35は、少なくとも部分的にそれを通して展開する弧状の開口部42を有する。
その弧状の開口部42は、アーム15,20が、図1Aにおいて示される対象物保持ポジションにあるとき、容器保持ポケット43を互いに形成するようにしている。
容器保持ポケット43の形状は、装置10により保持され、移送されるべき容器の特別なタイプの外形に対応している。
【0011】
それぞれのアームアセンブリ15の磁気端部40は、磁場を形成するための少なくとも一つかそれ以上の構造物と回路とを含む。好ましい構成において、それぞれの磁気端部40は、永久磁石45を具備している。図示しているように、永久磁石45は、それぞれの磁気端部40のおおよそ同じ位置に取付けられている。図示された形態において、永久磁石45の極は、磁気端部40が互いに引付け合うように方向付けられている。すなわち、一つのアームアセンブリの磁気端部40における永久磁石45は、北極が直接的に反対であり、他のアームアセンブリの磁気端部40における永久磁石45の南極に向き合うように方向付けられている。
【0012】
磁気駆動部50は、それぞれの回転軸25,30に対し磁気端部40の回転を、磁力によって引き起こすようにしている。その図示された実施態様において、磁気駆動部50は、磁気エレメント55と機械的または空圧駆動部60とを含む。その駆動部60は、磁気エレメント55がアームアセンブリ15,20の磁気端部40における永久磁石45間に介在されている第1のポジションと、磁気エレメント55がその永久磁石45間から取り払われた第2のポジション間で、磁気エレメント55を動かす。
第1ポジションは、図1A,1Bで示され、一方第2ポジションは、図1C,1Dで示されている。図1A,1Bで示されるように、磁気エレメント55の磁極は、その磁気エレメント55が第1ポジションにもたらされる時に磁気エレメント55から永久磁石45を反発させるように方向付けられる。磁気的反発力によって生じる力は、磁気端部40を互いに対応する軸25,30に対し回転させる要因となる。次いで、保持端部35は、容器保持ポケット43を形成するように互いに接近回転する。
【0013】
磁気駆動部50は、装置10により保持され、移送されるべき対象物が、保持端部35間にもたらされている間に、容器保持ポケット43を形成するように操作することができる。その代わりに、装置10により保持され、移送されるべき対象物は、保持端部35が互いに近づくように回転させられ、そのポケット43が形成された後に、容器保持ポケット43内に置かれる。
【0014】
上述したように、図1C,1Dは、駆動部60が磁気エレメント55を第2ポジションに動かす際に装置10の振舞いを示している。
このポジションにおいて、磁気エレメント55は、磁気端部40の永久磁石45間から実質的に開放される。それ故、永久磁石45の極は、互いに引き合うように方向付けられ、対応する吸引力は、磁気端部40を互いに向かうように引っ張り、これにより、保持端部35を、軸25,30回りに、互いに引き離すように対応する回転を引き起こす。このポジションにおいて、装置10により保持され、操作される対象物は、保持端部35間にもたらされるか、保持端部35間から取り除かれる。
【0015】
図1A〜1Dで示しているように、装置10の構造および操作は、保持端部35を、開放ポジションに付勢する吸引状態に向けられる永久磁石45の磁極によって説明した。
しかしながら、永久磁石45の磁極は、また、図1A,1Bに示している閉じたポジションに保持端部35を付勢する反発状態に自然に方向付けられ得ることも諒解されよう。
そのような場合、磁気エレメント55が永久磁石45間にあるとき、磁気エレメント55の極は、永久磁石45が磁気エレメント55に向かって引き付けられるように方向付けられる。
【0016】
装置10の更なる異なった態様に従っていえば、駆動部60は、所望の磁気吸引力、反発力を生み出すために、磁気エレメント55を回転するように構成することもできる。
このような場合、磁気エレメント55は、磁気端部40間に配置され、第1、第2の角度ポジション間を回転する。第1の角度ポジションにおいて、磁気エレメント55は、その磁極が磁気端部40を反発するような角度に回転され、それにより、対象物保持端部35を互いに閉じた状態に動かされる。
第2の角度ポジションにおいては、磁気エレメント55は、その磁極が磁気端部40を引き付けるような角度に回転され、それにより対象物保持端部35を互いに離れるように動かして開いた状態に動かされる。
【0017】
図2A,2Bは、図1A〜1Dで示した装置10の別の態様の実施形態を示している。
図2A,2Bにおける実施形態において、磁気エレメント55と駆動部60は、電磁石65と対応する電流コントロールシステム70とによって置き換えられている。
この実施態様では、少なくとも二つの異なった方法で操作される。
第1に、電流コントロールシステム70によってもたらされる電流の存否は、装置10が開いているか閉じているかを決定付けるために用いられる。
次に、電流コントロールシステム70は、例えば、永久磁石45を、互いに反発するように、あるいは直接保持端部35を、閉じた状態にもたらすように、電磁石65を通して電流を供給するように用いられる。
保持端部35は、電磁石65から単に電流を遮断することによって開放状態にもたらされ、永久磁石45の吸引磁気力によって互いに磁気端部40を引き付けるようにすることができる。
第2には、電流コントロールシステム70によりもたらされる電流の方向は、装置10の開閉状態を制御するのに用いられる。後者の場合には、電流コントロールシステム70は、互いに永久磁石45を反発させる最初の方向に、電磁石65を通して電流を供給し、そしてそれにより保持端部35を互いに近づけるように操作して閉じた状態とされる。電流コントロールシステム70によって供給される電流は、互いに永久磁石45に対して極を反転し、それにより、保持端部35を互いに離れるように操作して開放状態とされる。
それぞれの場合において、電流コントロールシステム70の操作は、プログラマブルコンピュータのコントロール下に稼動される。
【0018】
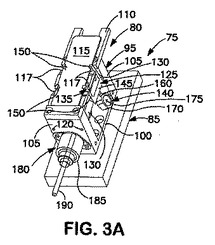
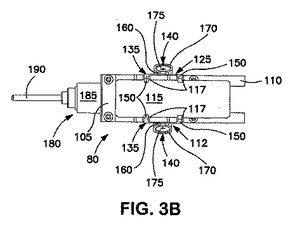
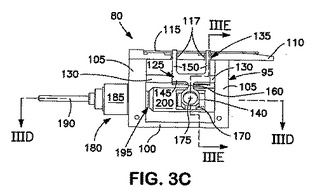
図3A〜3Eと、図4A〜4Eは、本発明の着想に従って構築された分析システムにおいて、対象物を選択的に保持したり開放したりするための装置の他の実施形態を示している。
これらの図に示された実施形態では、特に分析ユニットにおける顕微鏡スライドを移動させるために適応させている。前述したように、その装置は、図3Aと図4Aにおける75は、キャリッジ駆動部85上に取付けられたスライドキャリッジアセンブリ80を含む。
キャリッジ駆動部85とキャリッジアセンブリ80は、キャリッジ駆動部85が分析ユニット内において複数のポジション間でキャリッジアセンブリ80を移動できるように結合している。キャリッジ駆動部85は、同様に、分析ユニット内において様々なポジション間で操作されるべくキャリッジアセンブリ80を回転するようにしている。図示された実施形態で使用のために変形し得るキャリッジドライブは、すでにつまびらかにされた特許USP.NO.5209903、USP.NO.582596において開示されている。キャリッジドライブの他の形態もさらに用いることもできる。
【0019】
スライドキャリッジアセンブリ80は、アセンブリ80の様々な部品に対する初期のサポートとして作用する取付フレーム95を含む。取付フレーム95の下方部位は、アセンブリ80をキャリッジ駆動部85に結合するために用いられるベースエレメント100として規定される。一対の起立した端部材105は、ベースエレメント100とスライド取付ベッド110の端部から延在している。取付ベッド110は、分析システムにおいて移載され、同様に操作された顕微鏡スライド115のための初期のサポートエレメントとして機能している。取付ベッド110は顕微鏡スライド115の幅より小さい。ノッチ117は、取付ベッド110とスライド115の端部近傍の中央線に指向して展開している。
【0020】
一対の回転軸120は、端部材105間に延在している。回転軸120は、互いに平行に、好ましくは同じ高さに吊っている。それぞれの回転軸は、対応するアームアセンブリ125を支えている。隙間エレメント130は、それぞれの回転軸120に沿って、それぞれのアームアセンブリ125の長手方向の動きを規定している。好ましくは、アームアセンブリ125は、それぞれの回転軸120に対して互いに直接対向するように、同じ長手方向に配列されている。
【0021】
それぞれのアームアセンブリ125は、保持端部135と、対応する回転軸120の反対側側部に配置している磁気端部140とを含む。それぞれの回転軸120の中央は、このように対応するアームアセンブリ125の回転軸として規定している。それぞれの回転軸120は、対応するアームアセンブリ125の横梁145における中央に配列される開口を通して延在している。
【0022】
それぞれのアームアセンブリ125の保持端部135は、対応する横梁145から立ち上がる一対のグリップアーム150を含んでいる。それぞれのグリップアーム150は、端部に溝155を形成している。ノッチ117は、グリップアーム150を受けるように配置している。グリップアーム150が、図3A〜3Eに示しているように、保持状態にあるとき、溝155の内表面は、溝155の上下表面がスライド115の鉛直方向の動きを規制する一方、取付ベッド110上のスライド115水平方向の動きを規制している。
【0023】
それぞれのアームアセンブリ125の磁気端部140は、横梁145に結合する第1の端部と磁気ハウジング170に連結する第2の端部とを有する横方向の梁160を含む。 それぞれの磁気ハウジング170は、対応する永久希土酸化物磁石175を支えている。
【0024】
図示された実施形態において、磁石175は、図3A〜3Eにおいて示されている、開放状態に、自動的にグリップアーム150が付勢するように取り付けられている。この開放状態において、顕微鏡スライド115は、容易に取付ベッド110に載置したり、取り除いたりすることができる。つまり、一つのアームアセンブリ125の磁石175は、他のアームアセンブリ125のハウジング170に取付けられている磁石175の北極が直接南極に面するように、ハウジング170に取付けられている。
【0025】
180で示している磁気駆動部アセンブリは、それぞれの回転軸120に対して磁気端部140を回転させるのに利用され、それによりグリップアーム150を、図4A〜4Eで示される開放状態と図3A〜3Eで示される閉止状態との間で、回転させるのに利用される。
磁気駆動部アセンブリ180は、端部材105の一つに取付けられた、リニアステッパモータのような、駆動モータ185を含む。そのモータ185は、少なくとも端部材105のうちの一つにより、同様に支えられた磁気ピストンアセンブリ195を操作するのに用いられるドライブロッド190を含む。その磁気ピストンアセンブリ195は、往復運動磁気ピストン205を少なくとも部分的に取り囲むハウジング200を含む。
特に図3D,4Dにおいて示されるように、磁気ピストン205は非磁性素材とボディ部材210により支えられる永久磁気部分215によって形成されるボディ部材210から構成されている。永久磁気部分210の磁極は、磁気部分210が永久磁石175間に位置されるとき、磁気端部140の永久磁石175が分離操作されるように、方向付けられる。
【0026】
操作において、モータ185とドライブロッド190は、先ず、図4D,4Eに示されるポジションに、磁気ピストン205を向ける。このポジションにおける磁気ピストン205によって、永久磁気部分210は、アームアセンブリ125の永久磁石175間に、直接的にその領域から退避される。これにより磁気端部140が互いに回転する。この回転動作により、対応するグリップアーム150が取付ベッド110から離れるように回転することになる。
この開放状態において、顕微鏡スライド115は、取付ベッド110に容易に載置され、あるいは取外すことができる。この状態は図4A〜4Cにまた図示されている。
【0027】
一旦、顕微鏡スライド115は、取付ベッド110に載置されると、モータ185とドライブロッド190は、図3D,3Eに示されるポジションに、磁気ピストン205を向ける。このポジションにおける磁気ピストン205をもって、永久磁気部分210は、アームアセンブリ125の永久磁石175間に、直接的にその領域内に配置され、これにより磁気端部140が互いに離れるように回転する。この回転動作により、対応するグリップアーム150が取付ベッド110に向けて回転することになる。この閉じた状態において、顕微鏡スライド115は、取付ベッド110で固定され、スライドキャリッジドライブ85は、スライドキャリッジアセンブリ80を自在に動かすことができる。この状態は、特に、図3A〜3Cにまた図示されている。
【0028】
この第2実施形態は、装置内の様々な磁石の方向付けによって説明してきた。この方向付けにおいて、グリップアーム150は、自動的に開放ポジションにもたらされ、永久磁気部分215が磁気端部140間の領域に移動する際に、閉じたポジションにもたらされる。しかしながら、グリップアーム150の閉止ポジションへの自然な移行は、装置75における様々な磁極の方向付けを単に切り換えることにより、容易になし得るということが諒解されよう。後者の場合、グリップアーム150は、永久磁気部分215が磁気端部140間の領域に移動した際に、開放ポジションにもたらされることになる。
【0029】
第1と第2実施形態では、磁石175に磁気部分215を交互に、間にもたらしたり、離したり操作するためのリニアステッパモータ185を示した。それはまた、モータ185は、磁石175間に位置する間、磁気部分215を回転させるロータリモータであるべきである。同様に、磁石175は、磁石175の磁極に関して磁気部分215の磁極の方向付けに基づく磁気部分215に対し近接/離間するように操作される。
【0030】
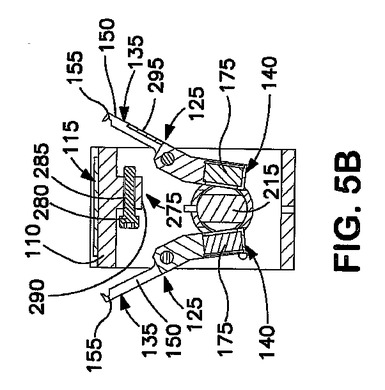
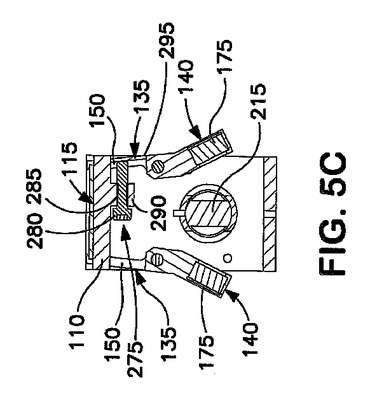
図5A〜5Cは、装置80に対する空間調整機構275の付加を示している。空間調整機構275は、少なくとも一つのグリップアーム150が、装置80が閉止状態にあるときの移動距離を決定するものである。言い換えれば、この移動距離は、スライド115がグリップアーム150間に保持されるとき、スライド115は、取付ベッド110上にあるとみなす横方向のポジションを決定付けるものである。そのような調整は、スライドを、プリンティングや被検材料のように様々な操作において、最適の状態に位置させることを許容している。
【0031】
図示された実施形態において、空間調整機構275は、取付ベッド110の下側側部の拡張ブロック290において、螺刻された開口部285を通して拡張する調整螺子280を含む。ストップ部材295は、横梁145から張り出し、装置80の第1の側部のグリップアーム150間から展開する。そのストップ部材295と調整螺子280の端部は、装置80が図5Cにおいて示される閉止状態に操作されるとき、互いに当接する。この状態において、ストップメンバー295に関連するグリップアーム150の移動は、スライド115が、装置80サイドにもたらされるポジションとして規定された故に、調整螺子280の端部のポジションによって制限される。
好ましくは、装置80の反対サイドにおけるグリップアーム115は、取付ベッド110上の適切なポジションにスライド115を推し進めるために、対応する溝117に自由に装入させることができる。
【0032】
前述のシステムから、それの基本的な着想から離れることなしに、多くの変形が可能である。本発明は、一つないし二つの特別な実施形態に関して詳細に説明したが、その技術事項は、添付されたクレームにおいて開示しているように、本発明の目的思想から離れることなしに変更が可能であることが諒解されよう。
【図面の簡単な説明】
【0033】
【図1A】試験管、薬瓶などの対象物を選択的に保持/解放するように適応させている本発明の第1実施形態における模式的図である。
【図1B】試験管、薬瓶などの対象物を選択的に保持/解放するように適応させている本発明の第1実施形態における模式的図である。
【図1C】試験管、薬瓶などの対象物を選択的に保持/解放するように適応させている本発明の第1実施形態における模式的図である。
【図1D】試験管、薬瓶などの対象物を選択的に保持/解放するように適応させている本発明の第1実施形態における模式的図である。
【図2A】電磁石が開放/閉鎖状態間で、装置を操作するように用いられる、図1A〜1Dで示した第1の実施形態の変形例にかかる模式的図である。
【図2B】電磁石が開放/閉鎖状態間で、装置を操作するように用いられる、図1A〜1Dで示した第1の実施形態の変形例にかかる模式的図である。
【図3A】顕微鏡スライドを選択的に保持/解放するように適応させ、その閉鎖状態における実施形態を示した、本発明の第2実施形態における模式的図である。
【図3B】顕微鏡スライドを選択的に保持/解放するように適応させ、その閉鎖状態における実施形態を示した、本発明の第2実施形態における模式的図である。
【図3C】顕微鏡スライドを選択的に保持/解放するように適応させ、その閉鎖状態における実施形態を示した、本発明の第2実施形態における模式的図である。
【図3D】顕微鏡スライドを選択的に保持/解放するように適応させ、その閉鎖状態における実施形態を示した、本発明の第2実施形態における模式的図である。
【図3E】顕微鏡スライドを選択的に保持/解放するように適応させ、その閉鎖状態における実施形態を示した、本発明の第2実施形態における模式的図である。
【図4A】開放状態における本発明の第2実施形態の模式的図である。
【図4B】開放状態における本発明の第2実施形態の模式的図である。
【図4C】開放状態における本発明の第2実施形態の模式的図である。
【図4D】開放状態における本発明の第2実施形態の模式的図である。
【図4E】開放状態における本発明の第2実施形態の模式的図である。
【図5A】調整機構はその閉じた状態における装置の保持端部間の隙間を設定するようにした本発明の第2の実施形態の模式的図である。
【図5B】調整機構はその閉じた状態における装置の保持端部間の隙間を設定するようにした本発明の第2の実施形態の模式的図である。
【図5C】調整機構はその閉じた状態における装置の保持端部間の隙間を設定するようにした本発明の第2の実施形態の模式的図である。
【特許請求の範囲】
【請求項1】
分析システムにおける対象物の選択的保持/開放のための装置であって、
第1の軸に対して回転可能に取付けられた第1のアームであり、対象物保持端部と、第1軸に対して互いに反対側に配列される磁気端部とを有する第1アームと、
第1軸に対して平行である第2の軸に対して回転可能に取付けられた第2のアームであり、対象物保持端部と、第2軸に対して互いに反対側に配列された磁気端部とを有する第2アームと、そして、
それぞれ、第1、第2軸に対して第1、第2アームの磁気端部の回転を磁力によって引き起こすように構成している磁気駆動部と、
を具備する装置。
【請求項2】
第1アームの第2アームへの動きを規制するように配列された空間調整機構を備えた、請求項1に記載の装置。
【請求項3】
第1、第2アームの磁気端部は、保持端部が保持されるべき対象物に遠位である第1のポジションと、保持端部が対象物に近位である第2のポジションとの間で、回転する構成とした請求項1に記載の装置。
【請求項4】
第1、第2の部材の磁気端部は、永久磁石から構成される請求項1に記載の装置。
【請求項5】
第1、第2アームの磁気端部の永久磁石は、磁気部分を互いに磁気的に引き合うように配置されている請求項4に記載の分析システムにおける対象物の選択的保持/開放のための装置。
【請求項6】
磁気駆動部は、永久駆動磁石と、
永久駆動磁石に連結したモータドライブとを具備し、
モータドライブは、第1、第2アームの磁気端部が、永久駆動磁石のポジションの結果として、互いに近接するように回転する第1のポジションと、
第1、第2アームの磁気端部が、永久駆動磁石のポジションの結果として、互いに離反するように回転する第2のポジションとの間で、永久駆動磁石を方向付ける請求項1に記載の装置。
【請求項7】
モータドライブは、リニアステッパモータにより構成される請求項6に記載の装置。
【請求項8】
永久駆動磁石は、永久駆動磁石が磁気端部間に配列される際第1、第2アームの磁気端部を反発させるように方向付けられる請求項6に記載の装置。
【請求項9】
磁気駆動部は、電磁石を具備する請求項1に記載の装置。
【請求項10】
電磁石を通して電流をコントロールするように構成したコントロールユニットを備えた請求項9に記載の分析システムにおける対象物の選択的保持/開放のための装置。
【請求項11】
分析ユニットにおける、分析のためのサンプルを保持するようにしたキャリアの選択的保持/開放のための装置であって、
キャリアを支えるようにした取付ベッドと、
第1の端部におけるアーム部材と第2の端部における磁気部分を有する第1のアームアセンブリであり、第1の軸に対し回転可能に取り付けた第1アームアセンブリと、
第1端部に近接するアームと、第2端部における磁気部分とを有する第2のアームアセンブリであり、第1軸に平行な第2の軸に対し回転可能に取付けられた第2アームアセンブリと、
磁気駆動部であって、第1、第2軸に対して互いに近接、離反する第1、第2アームアセンブリの磁気部分の回転を磁力によって引き起こすようにしたことにより、キャリアが取付ベッド上に受け入れられる第1のポジションと、キャリアがアーム部材の補助を伴う取付ベッド上に取り付ける第2のポジションとの間で、第1、第2アームアセンブリのアーム部材の対応する回転をもたらすようにした磁気駆動部と、
を具備する分析システムにおけるキャリアの選択的保持/開放のための装置。
【請求項12】
第1、第2アームアセンブリが第2ポジションにおいて、第1アームアセンブリから第2アームアセンブリに向かう動作を規制するように配列される空間調整機構を具備する請求項11に記載の装置。
【請求項13】
第1、第2アームアセンブリの磁気部分は永久磁石からなる請求項11に記載の装置。
【請求項14】
第1、第2アームアセンブリの磁気部分の永久磁石は、磁気部分が互いに磁力によって引き合うように配列されている請求項13に記載の装置。
【請求項15】
磁気駆動部は、永久駆動磁石と、
永久駆動磁石に連結するモータドライブとを具備し、
モータドライブは、第1、第2アームアセンブリの磁気部分が、永久駆動磁石のポジションの結果として互いに近接するように回転する少なくとも第1のポジションと、
第1、第2アームアセンブリの磁気部分が、永久駆動磁石のポジションの結果として互いに離反するように回転する第2のポジションとの間で、
永久駆動磁石を方向付ける請求項11に記載の装置。
【請求項16】
モータドライブは、リニアステッパモータを具備する請求項15に記載の装置。
【請求項17】
磁気駆動部は永久駆動磁石と、
永久駆動磁石に連結するモータドライブとを具備し、
モータドライブは、永久駆動磁石が、第1、第2アームアセンブリの永久磁石間に配列されている、少なくとも第1のポジションと、
永久駆動磁石が、第1、第2アームアセンブリの永久磁石間から離れるように移動させられる第2のポジションとの間で、
永久磁石を方向付ける請求項14に記載の装置。
【請求項18】
モータドライブは、リニアステッパモータを具備する請求項17に記載の装置。
【請求項19】
永久駆動磁石が磁気部分間に配列される際、永久駆動磁石は第1、第2アームアセンブリの永久磁石を反発させるように方向付けられる請求項17に記載の装置。
【請求項20】
磁気駆動部は、電磁石を具備する請求項14に記載の装置。
【請求項21】
電磁石を通して電流をコントロールするように構成したコントロールユニットを備えた請求項20に記載の装置。
【請求項22】
分析ユニットにおけるスライドの移送のための装置であって、
スライドキャリッジアセンブリと、分析ユニット内の複数のポジション間にスライドキャリッジアセンブリを動かすように連結するキャリッジドライブとを具備し、
スライドキャリッジアセンブリは、スライドを支えるように構成した取付ベッドと、
第1端部に対するアーム部材と第2端部の磁気部分を有する第1アームアセンブリであり、第1軸に対し回転可能に取付けられた第1アームアセンブリと、
第1端部に対するアーム部材と第2端部の磁気部分を有する第2アームアセンブリであり、第1軸に平行な第2軸に対して回転可能に取付けられた第2アームアセンブリと、
第1、第2軸に対し互いに接近/離反する第1、第2アームアセンブリの磁気部分の回転を磁力によって引き起こすようにし、それにより、スライドが取付ベッド上に受け入れられる第1のポジションと、アーム部材の補助を伴う取付ベッド上に取り付けることができる第2のポジションとの間で、第1、第2アームアセンブリのアーム部材の対応する回転を引き起こす磁気駆動部と、
を具備する装置。
【請求項23】
第1、第2アームアセンブリが第2ポジションにある際、第1アームアセンブリが第2アームアセンブリに向かう動作を規制するように配列される空間調整機構を具備する請求項22に記載の装置。
【請求項24】
第1、第2アームアセンブリの磁気部分は、永久磁石を具備する請求項22に記載の分析システムにおける装置。
【請求項25】
第1、第2アームアセンブリの磁気部分の永久磁石は、磁気部分がそれぞれ接近して磁力により引き付けられるように配設されている請求項24に記載の装置。
【請求項26】
磁気駆動部は永久駆動磁石を具備し、
永久駆動磁石は、
永久駆動磁石に連結するモータドライブであり、第1、第2アームアセンブリの磁気部分がそれぞれ永久駆動磁石のポジションの結果として互いに近接するように回転する少なくとも第1のポジションと、
第1、第2アームアセンブリの磁気部分が永久駆動磁石のポジションの結果として互いに離反するように回転される第2のポジションとの間で、永久駆動磁石に方向付けられるように運転されるモータドライブと、
を具備する請求項22に記載の装置。
【請求項27】
モータドライブは、リニアステッパモータから構成される請求項26に記載の装置。
【請求項28】
磁気駆動部は永久駆動磁石と、
永久駆動磁石に連結するモータドライブとを具備し、
モータドライブは、永久駆動磁石が第1、第2アームアセンブリの永久磁石間に配列されている少なくとも第1のポジションと、永久駆動磁石は第1、第2アームアセンブリの永久磁石間から離れるように移動させられる第2のポジションとの間で、永久磁石を方向付ける請求項25に記載の装置。
【請求項29】
モータドライブはリニアステッパモータを具備する請求項28に記載の分析システムにおける装置。
【請求項30】
永久駆動磁石が磁気部分間に配列される際、永久駆動磁石は第1、第2アームアセンブリの永久磁石を反発させるように方向付けられる請求項28に記載の分析システムにおける装置。
【請求項31】
磁気駆動部は電磁石を具備する請求項25に記載の分析システムにおける装置。
【請求項32】
電磁石を通して電流をコントロールするように構成したコントロールユニットを備えた請求項31に記載の分析システムにおける装置。
【請求項33】
分析ユニットにおいて搬送の間、分析のためのサンプルを保持するようにしたキャリアの選択的保持/開放のための装置であって、
キャリアと接触するようにした取付ベッドと、
第1の軸に対し回転可能に取り付けられた第1のクランプ部材であり、キャリアグリップエンドと第1軸の側部と反対側に配置された磁気端部とを有する第1クランプ部材と、
第1軸に平行な第2の軸に対し回転可能に取付けられた第2のクランプ部材であり、第2軸の側部と反対側に配置されたキャリアグリップエンドと磁気端部とを有する第2クランプ部材と、
それぞれ第1、第2軸に対して第1、第2クランプ部材の磁気端部の回転を磁力により引き起こすようにし、それにより、キャリアを取付ベッドに固定するようにした磁気駆動部と、
を具備する分析システムにおけるキャリアの選択的保持/開放のための装置。
【請求項34】
第1、第2クランプ部材の磁気端部は、グリップエンドが取付ベッドに遠位である第1のポジションとグリップエンドが取付ベッドの近傍である第2のポジションとの間で、回転するようにした請求項33に記載の装置。
【請求項35】
グリップエンドは、第2ポジションにおいて取付ベッドに対してキャリアを固定するように構成した請求項34に記載の装置。
【請求項36】
第1、第2クランプ部材の磁気端部は、永久磁石を具備する請求項33に記載の装置。
【請求項37】
第1、第2クランプ部材の磁気端部の永久磁石は、磁気部分が互いに磁力によって引き付けられるように配設されている請求項36に記載の装置。
【請求項38】
磁気駆動部は永久駆動磁石と、
永久駆動磁石に連結するモータドライブとを具備し、
第1、第2クランプ部材の磁気端部が、永久駆動磁石のポジションの結果として互いに近接するように回転する少なくとも第1のポジションと、第1、第2クランプ部材の磁気端部が、永久駆動磁石のポジションの結果として互いに離反するように回転する第2のポジションとの間で、永久駆動磁石を方向付ける請求項33に記載の装置。
【請求項39】
モータドライブは、リニアステッパモータを具備する請求項38に記載の装置。
【請求項40】
永久駆動磁石が磁気端部間に配列される際、永久駆動磁石は第1、第2クランプ部材の磁気端部を反発させるように方向付けられる請求項38に記載の装置。
【請求項41】
磁気駆動部は電磁石を具備する請求項33に記載の装置。
【請求項42】
電磁石を通して電流をコントロールするように構成したコントロールユニットを備えた請求項41に記載の装置。
【請求項1】
分析システムにおける対象物の選択的保持/開放のための装置であって、
第1の軸に対して回転可能に取付けられた第1のアームであり、対象物保持端部と、第1軸に対して互いに反対側に配列される磁気端部とを有する第1アームと、
第1軸に対して平行である第2の軸に対して回転可能に取付けられた第2のアームであり、対象物保持端部と、第2軸に対して互いに反対側に配列された磁気端部とを有する第2アームと、そして、
それぞれ、第1、第2軸に対して第1、第2アームの磁気端部の回転を磁力によって引き起こすように構成している磁気駆動部と、
を具備する装置。
【請求項2】
第1アームの第2アームへの動きを規制するように配列された空間調整機構を備えた、請求項1に記載の装置。
【請求項3】
第1、第2アームの磁気端部は、保持端部が保持されるべき対象物に遠位である第1のポジションと、保持端部が対象物に近位である第2のポジションとの間で、回転する構成とした請求項1に記載の装置。
【請求項4】
第1、第2の部材の磁気端部は、永久磁石から構成される請求項1に記載の装置。
【請求項5】
第1、第2アームの磁気端部の永久磁石は、磁気部分を互いに磁気的に引き合うように配置されている請求項4に記載の分析システムにおける対象物の選択的保持/開放のための装置。
【請求項6】
磁気駆動部は、永久駆動磁石と、
永久駆動磁石に連結したモータドライブとを具備し、
モータドライブは、第1、第2アームの磁気端部が、永久駆動磁石のポジションの結果として、互いに近接するように回転する第1のポジションと、
第1、第2アームの磁気端部が、永久駆動磁石のポジションの結果として、互いに離反するように回転する第2のポジションとの間で、永久駆動磁石を方向付ける請求項1に記載の装置。
【請求項7】
モータドライブは、リニアステッパモータにより構成される請求項6に記載の装置。
【請求項8】
永久駆動磁石は、永久駆動磁石が磁気端部間に配列される際第1、第2アームの磁気端部を反発させるように方向付けられる請求項6に記載の装置。
【請求項9】
磁気駆動部は、電磁石を具備する請求項1に記載の装置。
【請求項10】
電磁石を通して電流をコントロールするように構成したコントロールユニットを備えた請求項9に記載の分析システムにおける対象物の選択的保持/開放のための装置。
【請求項11】
分析ユニットにおける、分析のためのサンプルを保持するようにしたキャリアの選択的保持/開放のための装置であって、
キャリアを支えるようにした取付ベッドと、
第1の端部におけるアーム部材と第2の端部における磁気部分を有する第1のアームアセンブリであり、第1の軸に対し回転可能に取り付けた第1アームアセンブリと、
第1端部に近接するアームと、第2端部における磁気部分とを有する第2のアームアセンブリであり、第1軸に平行な第2の軸に対し回転可能に取付けられた第2アームアセンブリと、
磁気駆動部であって、第1、第2軸に対して互いに近接、離反する第1、第2アームアセンブリの磁気部分の回転を磁力によって引き起こすようにしたことにより、キャリアが取付ベッド上に受け入れられる第1のポジションと、キャリアがアーム部材の補助を伴う取付ベッド上に取り付ける第2のポジションとの間で、第1、第2アームアセンブリのアーム部材の対応する回転をもたらすようにした磁気駆動部と、
を具備する分析システムにおけるキャリアの選択的保持/開放のための装置。
【請求項12】
第1、第2アームアセンブリが第2ポジションにおいて、第1アームアセンブリから第2アームアセンブリに向かう動作を規制するように配列される空間調整機構を具備する請求項11に記載の装置。
【請求項13】
第1、第2アームアセンブリの磁気部分は永久磁石からなる請求項11に記載の装置。
【請求項14】
第1、第2アームアセンブリの磁気部分の永久磁石は、磁気部分が互いに磁力によって引き合うように配列されている請求項13に記載の装置。
【請求項15】
磁気駆動部は、永久駆動磁石と、
永久駆動磁石に連結するモータドライブとを具備し、
モータドライブは、第1、第2アームアセンブリの磁気部分が、永久駆動磁石のポジションの結果として互いに近接するように回転する少なくとも第1のポジションと、
第1、第2アームアセンブリの磁気部分が、永久駆動磁石のポジションの結果として互いに離反するように回転する第2のポジションとの間で、
永久駆動磁石を方向付ける請求項11に記載の装置。
【請求項16】
モータドライブは、リニアステッパモータを具備する請求項15に記載の装置。
【請求項17】
磁気駆動部は永久駆動磁石と、
永久駆動磁石に連結するモータドライブとを具備し、
モータドライブは、永久駆動磁石が、第1、第2アームアセンブリの永久磁石間に配列されている、少なくとも第1のポジションと、
永久駆動磁石が、第1、第2アームアセンブリの永久磁石間から離れるように移動させられる第2のポジションとの間で、
永久磁石を方向付ける請求項14に記載の装置。
【請求項18】
モータドライブは、リニアステッパモータを具備する請求項17に記載の装置。
【請求項19】
永久駆動磁石が磁気部分間に配列される際、永久駆動磁石は第1、第2アームアセンブリの永久磁石を反発させるように方向付けられる請求項17に記載の装置。
【請求項20】
磁気駆動部は、電磁石を具備する請求項14に記載の装置。
【請求項21】
電磁石を通して電流をコントロールするように構成したコントロールユニットを備えた請求項20に記載の装置。
【請求項22】
分析ユニットにおけるスライドの移送のための装置であって、
スライドキャリッジアセンブリと、分析ユニット内の複数のポジション間にスライドキャリッジアセンブリを動かすように連結するキャリッジドライブとを具備し、
スライドキャリッジアセンブリは、スライドを支えるように構成した取付ベッドと、
第1端部に対するアーム部材と第2端部の磁気部分を有する第1アームアセンブリであり、第1軸に対し回転可能に取付けられた第1アームアセンブリと、
第1端部に対するアーム部材と第2端部の磁気部分を有する第2アームアセンブリであり、第1軸に平行な第2軸に対して回転可能に取付けられた第2アームアセンブリと、
第1、第2軸に対し互いに接近/離反する第1、第2アームアセンブリの磁気部分の回転を磁力によって引き起こすようにし、それにより、スライドが取付ベッド上に受け入れられる第1のポジションと、アーム部材の補助を伴う取付ベッド上に取り付けることができる第2のポジションとの間で、第1、第2アームアセンブリのアーム部材の対応する回転を引き起こす磁気駆動部と、
を具備する装置。
【請求項23】
第1、第2アームアセンブリが第2ポジションにある際、第1アームアセンブリが第2アームアセンブリに向かう動作を規制するように配列される空間調整機構を具備する請求項22に記載の装置。
【請求項24】
第1、第2アームアセンブリの磁気部分は、永久磁石を具備する請求項22に記載の分析システムにおける装置。
【請求項25】
第1、第2アームアセンブリの磁気部分の永久磁石は、磁気部分がそれぞれ接近して磁力により引き付けられるように配設されている請求項24に記載の装置。
【請求項26】
磁気駆動部は永久駆動磁石を具備し、
永久駆動磁石は、
永久駆動磁石に連結するモータドライブであり、第1、第2アームアセンブリの磁気部分がそれぞれ永久駆動磁石のポジションの結果として互いに近接するように回転する少なくとも第1のポジションと、
第1、第2アームアセンブリの磁気部分が永久駆動磁石のポジションの結果として互いに離反するように回転される第2のポジションとの間で、永久駆動磁石に方向付けられるように運転されるモータドライブと、
を具備する請求項22に記載の装置。
【請求項27】
モータドライブは、リニアステッパモータから構成される請求項26に記載の装置。
【請求項28】
磁気駆動部は永久駆動磁石と、
永久駆動磁石に連結するモータドライブとを具備し、
モータドライブは、永久駆動磁石が第1、第2アームアセンブリの永久磁石間に配列されている少なくとも第1のポジションと、永久駆動磁石は第1、第2アームアセンブリの永久磁石間から離れるように移動させられる第2のポジションとの間で、永久磁石を方向付ける請求項25に記載の装置。
【請求項29】
モータドライブはリニアステッパモータを具備する請求項28に記載の分析システムにおける装置。
【請求項30】
永久駆動磁石が磁気部分間に配列される際、永久駆動磁石は第1、第2アームアセンブリの永久磁石を反発させるように方向付けられる請求項28に記載の分析システムにおける装置。
【請求項31】
磁気駆動部は電磁石を具備する請求項25に記載の分析システムにおける装置。
【請求項32】
電磁石を通して電流をコントロールするように構成したコントロールユニットを備えた請求項31に記載の分析システムにおける装置。
【請求項33】
分析ユニットにおいて搬送の間、分析のためのサンプルを保持するようにしたキャリアの選択的保持/開放のための装置であって、
キャリアと接触するようにした取付ベッドと、
第1の軸に対し回転可能に取り付けられた第1のクランプ部材であり、キャリアグリップエンドと第1軸の側部と反対側に配置された磁気端部とを有する第1クランプ部材と、
第1軸に平行な第2の軸に対し回転可能に取付けられた第2のクランプ部材であり、第2軸の側部と反対側に配置されたキャリアグリップエンドと磁気端部とを有する第2クランプ部材と、
それぞれ第1、第2軸に対して第1、第2クランプ部材の磁気端部の回転を磁力により引き起こすようにし、それにより、キャリアを取付ベッドに固定するようにした磁気駆動部と、
を具備する分析システムにおけるキャリアの選択的保持/開放のための装置。
【請求項34】
第1、第2クランプ部材の磁気端部は、グリップエンドが取付ベッドに遠位である第1のポジションとグリップエンドが取付ベッドの近傍である第2のポジションとの間で、回転するようにした請求項33に記載の装置。
【請求項35】
グリップエンドは、第2ポジションにおいて取付ベッドに対してキャリアを固定するように構成した請求項34に記載の装置。
【請求項36】
第1、第2クランプ部材の磁気端部は、永久磁石を具備する請求項33に記載の装置。
【請求項37】
第1、第2クランプ部材の磁気端部の永久磁石は、磁気部分が互いに磁力によって引き付けられるように配設されている請求項36に記載の装置。
【請求項38】
磁気駆動部は永久駆動磁石と、
永久駆動磁石に連結するモータドライブとを具備し、
第1、第2クランプ部材の磁気端部が、永久駆動磁石のポジションの結果として互いに近接するように回転する少なくとも第1のポジションと、第1、第2クランプ部材の磁気端部が、永久駆動磁石のポジションの結果として互いに離反するように回転する第2のポジションとの間で、永久駆動磁石を方向付ける請求項33に記載の装置。
【請求項39】
モータドライブは、リニアステッパモータを具備する請求項38に記載の装置。
【請求項40】
永久駆動磁石が磁気端部間に配列される際、永久駆動磁石は第1、第2クランプ部材の磁気端部を反発させるように方向付けられる請求項38に記載の装置。
【請求項41】
磁気駆動部は電磁石を具備する請求項33に記載の装置。
【請求項42】
電磁石を通して電流をコントロールするように構成したコントロールユニットを備えた請求項41に記載の装置。
【図1A】

【図1B】

【図1C】
【図1D】
【図2A】
【図2B】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】

【図4A】

【図4B】
【図4C】

【図4D】

【図4E】
【図5A】
【図5B】
【図5C】
【図1B】
【図1C】
【図1D】
【図2A】
【図2B】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図4A】
【図4B】
【図4C】
【図4D】
【図4E】
【図5A】
【図5B】
【図5C】
【公表番号】特表2008−510993(P2008−510993A)
【公表日】平成20年4月10日(2008.4.10)
【国際特許分類】
【出願番号】特願2007−529914(P2007−529914)
【出願日】平成17年8月12日(2005.8.12)
【国際出願番号】PCT/US2005/028561
【国際公開番号】WO2006/023363
【国際公開日】平成18年3月2日(2006.3.2)
【出願人】(505275295)ベックマン コールター,インコーポレイティド (25)
【Fターム(参考)】
【公表日】平成20年4月10日(2008.4.10)
【国際特許分類】
【出願日】平成17年8月12日(2005.8.12)
【国際出願番号】PCT/US2005/028561
【国際公開番号】WO2006/023363
【国際公開日】平成18年3月2日(2006.3.2)
【出願人】(505275295)ベックマン コールター,インコーポレイティド (25)
【Fターム(参考)】
[ Back to top ]