
列車初期位置決定装置及び列車初期位置決定方法
【課題】無線測距値を利用しながら列車の初期位置を正確に決定することができる列車初期位置決定装置等を提供すること。
【解決手段】列車初期位置決定装置1は、停止中の列車23の位置を無線測距値として複数回取得する無線測距値取得手段3と、無線測距値取得手段で得られた複数の無線測距値の平均値を取得する平均値取得部5と、平均値取得部で得られた複数の無線測距値の平均値から列車初期位置を決定する初期位置決定部7とを備える。
【解決手段】列車初期位置決定装置1は、停止中の列車23の位置を無線測距値として複数回取得する無線測距値取得手段3と、無線測距値取得手段で得られた複数の無線測距値の平均値を取得する平均値取得部5と、平均値取得部で得られた複数の無線測距値の平均値から列車初期位置を決定する初期位置決定部7とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、列車の初期位置の決定に関するものである。
【背景技術】
【0002】
従来の列車検知手法は、軌道回路を用いて列車の位置を検出している。しかしながら、軌道回路は軌道を長い区間で複数に分割するため、具体的にどの軌道回路区域に列車が存在しているかについては特定することができるが、さらに、その特定された軌道回路区域内のどの位置に列車が存在しているかまでは検知することが困難であった。このため、先行列車が軌道回路から通り抜けるまでは後続列車は当該軌道回路には進入できないようになっており、列車の本数を増加させると効率が上がらない欠点があった。
【0003】
また、このような欠点を解消する方法として、特表平7−507752号公報(特許文献1)に開示された列車位置決定システムが開示されている。かかるシステムでは、沿線無線機と列車無線機との間の距離を計測することができ、また、沿線無線機及び列車無線機間のデータ交換や沿線無線機相互間のデータ交換を行うことができる。これは、地上沿線上に設置された無線機と車両に設置された車上無線機との間の距離を無線電波遅延計測態様によって測定し、複数の測定結果から列車がどの位置に存在しているかを判断するものであった。
【特許文献1】特表平7−507752号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に開示された列車位置決定システムでは、列車の電源を投入した際に、まず、列車が軌道上のどの位置に存在しているかという初期位置を正確に決定する必要がある。しかし、上述したように無線によって計測された距離の値(以下、「無線測距値」)は、計測すれば必ず正確な値として得られるとは限らない。これは、各無線機間の距離は固定であっても電波環境などの影響により無線測距値が真の値からばらつくためであり、本出願人の検討によると、無線測距値は正規分布状のばらつきを有しているものと考える。そして、そのようなばらつきに起因し初期位置の決定を誤った場合には列車位置の追跡は失敗することとなり、その場合、全線停止などの安全策をとらなければならない。
【0005】
本発明は、このような問題に鑑みてなされたものであり、無線測距値を利用しながら列車の初期位置を正確に決定することができる列車初期位置決定装置及び列車初期位置決定方法を提供することである。
【課題を解決するための手段】
【0006】
上述した課題を解決するため、本発明は、停止している列車の位置から初期位置を決定する装置であって、停止中の列車の位置を無線測距値として複数回取得する無線測距値取得手段と、前記無線測距値取得手段で得られた複数の無線測距値の平均値を取得する平均値取得部と、前記平均値取得部で得られた複数の無線測距値の平均値から列車初期位置を決定する初期位置決定部とを備えることを特徴とする。
【0007】
前記平均値取得部は、N回分の無線測距値の平均である旧平均値と新たに前記無線測距値取得手段によって得られたN+1回目の無線測距値とを平均した新平均値を算出し、前記新平均値を記憶する記憶部をさらに備えていると好適である。
【0008】
好適には、前記無線測距値取得手段と前記平均値取得部との間に介在されるフィルタ手段をさらに備え、前記フィルタ手段は、前記無線測距値取得手段から得られた無線測距値のうち許容数値範囲内にあるものだけを前記平均値取得部に出力する。
【0009】
前記フィルタ手段における許容数値範囲は、前記無線測距値取得手段から得られた複数の無線測距値を平均した基準値に応じて決定されており、前記フィルタ手段のフィルタ作用は、前記基準値に基づく許容数値範囲が決定された後に機能すると好適である。
【0010】
好適には、フィルタ作用が機能後に、前記無線測距値取得手段から得られた無線測距値のうち許容数値範囲内にあるものが所定個数、所定割合又は所定時間、出現しない場合には、前記基準値を再決定するか或いは異常報知を行う。
【0011】
上記と同目的を達成するため、本発明は、列車初期位置決定方法も提供する。すなわち、本発明に係る列車初期位置決定方法は、停止している列車の位置から初期位置を決定する方法であって、停止中の列車の位置を無線測距値として複数回取得し、複数の無線測距値の平均値を取得し、前記平均値から列車初期位置を決定することを特徴とする。
【発明の効果】
【0012】
列車の停止中に複数回、無線測距値を取得し、それらの平均化処理を行うことにより、無線測距値を利用しながらも、列車の初期位置を正確に決定することができる。
【0013】
なお、本発明の他の特徴及びそれによる作用効果は、添付図面を参照し、実施の形態によって更に詳しく説明する。
【発明を実施するための最良の形態】
【0014】
以下、この発明に係る実施の形態を、添付図面に基づいて説明する。なお、図中、同一符号は同一又は対応部分を示すものとする。
【0015】
図1に、本発明の第1の実施の形態に係る列車初期位置決定装置の構成を示す。図2は、現場での列車や無線機を現したイメージ図である。
【0016】
図1に示されるように、列車初期位置決定装置1は主に、無線測距値取得手段3と、平均値取得部5と、初期位置決定部7と、記憶部9と、タイマー手段11とを備える。初期位置決定部7には、平均値取得部5及びタイマー手段11がそれぞれ接続されており、さらに平均値取得部5には無線測距値取得手段3及び記憶部9がそれぞれ接続されている。
【0017】
無線測距値取得手段3は、停止中の列車の位置を無線測距値として取得することができる。具体的に無線によって列車までの位置を距離値として計測する方法については周知の方法でよいため、その詳細な説明は省略する。
【0018】
平均値取得部5は、無線測距値取得手段3で得られた複数の無線測距値の平均値を算出する。記憶部9は、平均値取得部5で得られた複数の無線測距値の平均値を記憶する部分である。
【0019】
初期位置決定部7は、平均値取得部5で得られた複数の無線測距値の平均値から列車初期位置を決定する。なお、初期位置決定部7は、初期位置の決定のみを行う部分という意味ではなく、少なくとも初期位置の決定を行う部分であり、他の処理や判断を行う部分であってもよい。タイマー手段11は、無線測距値の測定を基準に定義した時間(例えば測定開始からの時間)または無線測距値の測定回数をカウントし、その情報を初期位置決定部7に送る。
【0020】
さらに、初期位置決定部7には、列車初期位置決定装置1とは別の他の装置における列車停止判定部13が接続されている。列車停止判定部13は、列車の位置に関する無線測距値が停止中の列車のものであることを確認すべく、初期位置決定部7に列車が停止状態にあるか否かの情報を送る。
【0021】
なお、かかる列車停止判定部13は、列車初期位置決定装置1の一部として取り込まれていてもよく、本発明では、概念的に列車停止判定部13が列車初期位置決定装置1の一部かあるいは別の装置の一部であるかは特に問わない。
【0022】
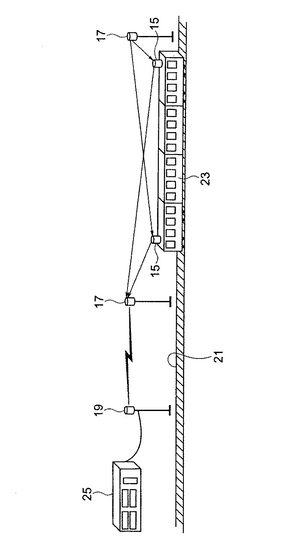
図2に基づいて、無線測距値取得手段3の構成について説明する。無線測距値取得手段3は、車上無線機15と、沿線無線機17と、駅無線機19とを備えている。車上無線機15は、軌道21上に設けられた列車23と一体的に取り付けられている。沿線無線機17は、軌道21に沿って間隔を有して複数設けられている。また、駅無線機19は、地上装置25と、対応する沿線無線機17とを連絡するように設けられている。なお、平均値取得部5、初期位置決定部7、記憶部9及びタイマー手段11は、地上装置25内に設けられている。
【0023】
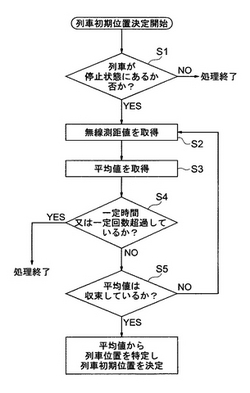
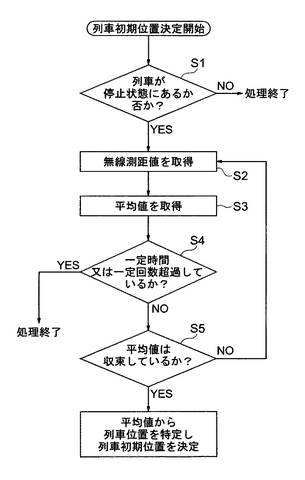
次に図3に基づいて本実施の形態に係る列車初期位置決定方法について説明する。列車初期位置の決定が開始されると、まず、ステップS1として、列車停止判定部13で得られた情報に基づいて列車23が停止しているか否かが判断される。列車が停止状態にある場合には、次の処理に進む。一方、列車が停止状態にない場合には、列車の初期位置決定は終了される。なお、列車が動いている場合には別の手段で初期位置を決定する。
【0024】
ステップS1において列車が停止状態にあると判断された場合には、ステップS2として、無線測距値取得手段3によって列車の位置を示す無線測距値が取得される。1回目の無線測距値は、そのまま記憶部9に記憶保存される。よって、1回目の無線測距値取得においては、ステップS3を通過してステップS4の処理に移行する。
【0025】
ステップS4においては、タイマー手段11からの情報を検討する。すなわち、タイマー手段11では、例えば無線測距値の測定を開始してからの測定時間または無線測距値の測定回数がカウントされており、カウント時間または回数が一定時間または一定回数を超過しているか否かを判断する。かかる一定時間または一定回数の値は十分な値がとられているため、1回目の無線測距値取得においては、当然に超過していないものと判断され、ステップS5に進む。ステップS5においては、無線測距値の平均値が適正な値に収束しているか否かが判断されるが、かかる処理においても、十分なサンプリングがなされていない段階では収束とは評価されないようになっているため、ステップS2に戻る。
【0026】
ステップS2においては、無線測距値取得手段3によって2回目の無線測距値が取得される。次に、ステップS3として、無線測距値の平均値が取得される。すなわち、平均値取得部5には、記憶部9から1回目の無線測距値が入力されると共に、無線測距値取得手段3から2回目の無線測距値が入力される。これより、平均値取得部5においては、2個分の無線測距値の平均値が求められ、その値が記憶部9に送られて記憶保存される。
【0027】
続いて、ステップS4及びステップS5において、上記と同様に、一定時間等の経過及び平均値収束がチェックされ、ステップS2に戻る。ステップS2においては、無線測距値取得手段3によって3回目の無線測距値が取得される。続いて、ステップS3として、無線測距値の新たな平均値が取得される。すなわち、平均値取得部5には、記憶部9から、前回得られた2個分の無線測距値の平均値が入力されると共に、無線測距値取得手段3から、3回目の無線測距値が入力される。これより、平均値取得部5においては、3個分の無線測距値の平均値が新たに求められ、その値が記憶部9に送られて記憶保存される。
【0028】
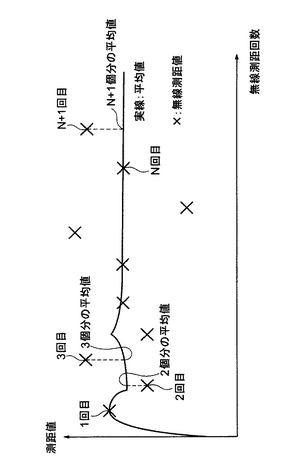
このような平均値取得のイメージを図4に示す。1回目の無線測距値と、2回目の無線測距値との平均値として、2個分の無線測距値の平均値が取得される。次に、3回目の無線測距値と、2個分の無線測距値の平均値とから、新たな平均値として3個分の無線測距値の平均値が取得される。以降同様にして、N+1回目の無線測距値と、N個分の無線測距値の平均値とから、N+1個分の無線測距値の平均値が取得される。よって、N+1回目の無線測距値が得られると、平均化処理を行い、記憶部9内にそれまで記憶されていたN個分の無線測距値の平均値が、新たに取得したN+1個分の無線測距値の平均値へと書き換えられていくものと捉えることができる。
【0029】
図3のフローチャートに戻り、ステップS5においては、無線測距値の平均値が適正な値に収束しているか否かが判断される。すなわち、記憶部9に記憶されている、その時点で最も新しいN+1個分の無線測距値の平均値が、予め決められた所定の数値範囲内に入っているか否かが判断される。その結果、無線測距値の平均値が適正な値に収束していないと判断された場合には、ステップS2に戻り、更に戻った際、ステップS4において、カウント時間または回数が一定時間または一定回数を超過しているものと判断されると、列車の初期位置決定は終了され、例えばその旨を報知するなどの処理を行うこともできる。一方、ステップS5において無線測距値の平均値が適正な値に収束していると判断された場合には、かかる平均値から列車23の位置を特定し、列車初期位置が決定される。
【0030】
このようにして本実施の形態によれば、列車23の停止中に複数回、無線測距値を取得し、それらの平均化処理を行うことにより、無線測距値を利用しながらも、列車の初期位置を正確に決定することができる。また、複数個分の無線測距値の平均化処理を一度に行わず、新たな無線測距値を取得する毎にそれまでの平均値に対して更に平均化処理を実施する態様であるため、記憶部9における負担が少なくて済む。これは、現実の実施では、軌道21上に列車23は1本だけではなく多数本存在しており、さらにその軌道21も多数存在しているため、結果的には処理設備や記憶設備の多大な負担軽減効果を得ることができる。
【0031】
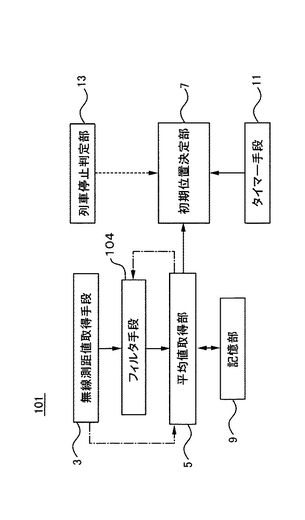
次に、図5及び図6を用いて、本発明における第2の実施の形態について説明する。図5に示されるように、本実施の形態に係る列車初期位置決定装置101は、前述した第1の実施の形態において、無線測距値取得手段3と平均値取得部5との間にフィルタ手段104が設けられているものである。フィルタ手段104は、本実施の形態ではいわゆるカルマンフィルタとして機能するものである。 フィルタ手段104は、無線測距値取得手段3から得られた無線測距値のうち許容数値範囲内にあるものだけを平均値取得部5に出力する。かかる許容数値範囲は、無線測距値取得手段3から得られた複数の無線測距値を平均した基準値に応じて決定される。よって、図5中に一点鎖線で示されるように、無線測距値取得手段3と平均値取得部5との間には、フィルタ手段104を介さずに無線測距値を平均値取得部5に送る情報伝達経路が設けられ、平均値取得部5とフィルタ手段104との間には、平均値取得部5において複数の無線測距値を平均することで得た基準値をフィルタ手段104に送る情報伝達経路が設けられている。
【0032】
次に、図6に基づいて第2の実施の形態に係る列車初期位置決定方法について説明する。列車初期位置の決定が開始されると、まず、ステップS1として、列車停止判定部13で得られた情報に基づいて列車23が停止しているか否かが判断される。列車が停止状態にある場合には、次の処理に進む。一方、列車が停止状態にない場合には、列車の初期位置決定は終了される。
【0033】
ステップS1において列車が停止状態にあると判断された場合には、ステップS2として、無線測距値取得手段3によって列車の位置を示す無線測距値が取得される。さらに、ステップS3として、無線測距値を平均化してフィルタ手段104で用いる基準値を取得する。この平均化の態様としては、複数の無線測距値をまとめて取得しそれを平均化する態様でもよく、あるいは、上記図4のイメージに示したように無線測距値を取得する毎にそれまでの平均値との平均化を図る態様でもよい。
【0034】
続いて、ステップS4として、無線測距値取得手段3によって列車の位置を示す無線測距値が取得される。次に、ステップS5として、無線測距値をカルマンフィルタに導入する。すなわち、無線測距値取得手段3から無線測距値をフィルタ手段104に送り、フィルタ手段104はその無線測距値が許容数値範囲にあるか否かを判断する。かかる許容数値範囲は、ステップS3で取得した基準値に基づいて定められる。そして、無線測距値が許容数値範囲にある場合には、その無線測距値が記憶部9に記憶保存される。なお、本図6のステップS6、ステップS7及びステップS8は、前述した図3のステップS3、ステップS4及びステップS5と同じである。よって、ステップS4における最初の無線測距値取得においては、単にその無線測距値が記憶部9に記憶保存され、ステップS4に戻る。
【0035】
ステップS4に戻ると、再度、無線測距値取得手段3によって列車の位置を示す無線測距値が取得される。さらに、ステップS5においてカルマンフィルタにかけられ、無線測距値が許容数値範囲にある場合には、ステップS6に進行して、無線測距値の平均値が取得される。ここでの処理も、前述した図4のステップS3と同様であり、N+1回目の無線測距値と、N個分の無線測距値の平均値とから、N+1個分の無線測距値の平均値が取得される。
【0036】
ステップS8は、前述した図4のステップS5と同様であり、無線測距値の平均値が適正な値に収束していないと判断された場合には、ステップS2に戻るが、更に戻った際、ステップS7において、カウント時間または回数が一定時間または一定回数を超過しているものと判断されると、列車の初期位置決定は終了され、例えばその旨を報知するなどの処理を行うこともできる。
【0037】
一方、ステップS8において無線測距値の平均値が適正な値に収束していると判断された場合には、かかる平均値から列車23の位置を特定し、列車初期位置が決定される。
【0038】
また、ステップS5の説明に戻り、取得した無線測距値がカルマンフィルタにかけられ、無線測距値が許容数値範囲内ではないと判断された場合には、ステップS9に進行する。ステップS9では、端的にはカルマンフィルタで用いる基準値すなわち許容数値範囲が適正か否かをチェックする。すなわち、ステップS4における無線測距値の取得を開始してから、つまり、フィルタ手段104のフィルタを機能した後から、ステップS4で取得した無線測距値のうちカルマンフィルタを通過しないもの(許容範囲内にないもの)が所定個数以上となったか否かを判断する。そして、所定個数に満たない場合には、ステップS4の処理に戻る。一方、所定個数以上となった場合には、カルマンフィルタで用いる基準値が適正ではないものとして、ステップS2に戻り基準値を再度決定しなおすか、或いは、処理を終了し、異常報知を行う。
【0039】
このような本実施の形態によれば、第1の実施の形態と同様、無線測距値を利用しながらも、列車の初期位置を正確に決定することができる。また、新たな無線測距値を取得する毎にそれまでの平均値に対して更に平均化処理を実施する態様であるため、記憶部9における負担が少なくて済む。
【0040】
さらに、初期値位置決定のために平均値取得部5に入力される無線測距値は、フィルタ手段104によって制限された許容範囲内のものだけであるため、平均対象のばらつきを小さくすることができ、その分収束時間を短縮することができる。また、カルマンフィルタの基準値を決定するための平均化処理を行うが、本発明は列車の初期値を問題としており、すなわち、列車の停止中に位置検知を行うので位置更新処理に関する応答遅れの問題も生じない。
【0041】
また、本出願人の検討によると無線測距値は正規分布状のばらつきを有しており、正規分布の中心から3σの範囲内の測距確率はガウス分布の場合90%以上となる。よって、基準値にばらつきが含まれる確率は低く、分布の中心から少しずれた値を基準値とした場合でも、その後の測距確率も真値である可能性が高いため平均化していくと真値に近づくことになる。さらに、あまり適切ではない基準値が決定された場合には、図6のステップS9として例示したようにカルマンフィルタを通過しない特定の状態をもって再度、基準値を決定しなおすなどの措置を設けておくことで、徒に処理が長期化したり不適切な値が列車初期位置として決定されてしまうことを防止することができる。
【0042】
以上、好ましい実施の形態を参照して本発明の内容を具体的に説明したが、本発明の基本的技術思想及び教示に基づいて、当業者であれば、種々の改変態様を採り得ることは自明である。
【0043】
本発明は、各構成部が図1や図5のブロック図に示す接続態様であることに限定されるものではなく、当該ブロック図はあくまで一例である。よって、各構成部の機能を奏する部分が存在し、それらが上述したような流れで列車初期位置を決定することができれば特に限定されるものではない。また、当該ブロック図の各構成部はそれぞれ一つの部分として明確に形成されている必要はなく、よって、例えば当該ブロック図の複数の構成部が一つのコンピュータなどの処理装置で実現されるものであってもよく、逆に、当該ブロック図の一つの構成部が複数の部品又は装置で実現されるものであってもよい。
【0044】
図6のステップS9においては、カルマンフィルタで用いる基準値すなわち許容数値範囲が適正なものであるか否かをチェックできればよく、要するに、フィルタ作用が機能後に、無線測距値取得手段から得られた無線測距値のうち許容数値範囲内にあるものが所定個数、所定割合又は所定時間、出現しないか否かを判断できればよい。上記実施の形態の具体的な説明は、これらのうち個数に着目した判断態様の例示である。
【図面の簡単な説明】
【0045】
【図1】本発明の第1の実施の形態に係る列車初期位置決定装置の概要構成を示すブロック図である。
【図2】現場での列車や無線機を現すイメージ図である。
【図3】図1の装置における列車の初期位置決定方法を示すフローチャートである。
【図4】平均値取得のイメージを示す図である。
【図5】本発明の第2の実施の形態に係る列車初期位置決定装置の概要構成を示すブロック図である。
【図6】図5の装置における列車の初期位置決定方法を示すフローチャートである。
【符号の説明】
【0046】
1、101 列車初期位置決定装置
3 無線測距値取得手段
5 平均値取得部
7 初期位置決定部
9 記憶部
23 列車
104 フィルタ手段
【技術分野】
【0001】
本発明は、列車の初期位置の決定に関するものである。
【背景技術】
【0002】
従来の列車検知手法は、軌道回路を用いて列車の位置を検出している。しかしながら、軌道回路は軌道を長い区間で複数に分割するため、具体的にどの軌道回路区域に列車が存在しているかについては特定することができるが、さらに、その特定された軌道回路区域内のどの位置に列車が存在しているかまでは検知することが困難であった。このため、先行列車が軌道回路から通り抜けるまでは後続列車は当該軌道回路には進入できないようになっており、列車の本数を増加させると効率が上がらない欠点があった。
【0003】
また、このような欠点を解消する方法として、特表平7−507752号公報(特許文献1)に開示された列車位置決定システムが開示されている。かかるシステムでは、沿線無線機と列車無線機との間の距離を計測することができ、また、沿線無線機及び列車無線機間のデータ交換や沿線無線機相互間のデータ交換を行うことができる。これは、地上沿線上に設置された無線機と車両に設置された車上無線機との間の距離を無線電波遅延計測態様によって測定し、複数の測定結果から列車がどの位置に存在しているかを判断するものであった。
【特許文献1】特表平7−507752号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に開示された列車位置決定システムでは、列車の電源を投入した際に、まず、列車が軌道上のどの位置に存在しているかという初期位置を正確に決定する必要がある。しかし、上述したように無線によって計測された距離の値(以下、「無線測距値」)は、計測すれば必ず正確な値として得られるとは限らない。これは、各無線機間の距離は固定であっても電波環境などの影響により無線測距値が真の値からばらつくためであり、本出願人の検討によると、無線測距値は正規分布状のばらつきを有しているものと考える。そして、そのようなばらつきに起因し初期位置の決定を誤った場合には列車位置の追跡は失敗することとなり、その場合、全線停止などの安全策をとらなければならない。
【0005】
本発明は、このような問題に鑑みてなされたものであり、無線測距値を利用しながら列車の初期位置を正確に決定することができる列車初期位置決定装置及び列車初期位置決定方法を提供することである。
【課題を解決するための手段】
【0006】
上述した課題を解決するため、本発明は、停止している列車の位置から初期位置を決定する装置であって、停止中の列車の位置を無線測距値として複数回取得する無線測距値取得手段と、前記無線測距値取得手段で得られた複数の無線測距値の平均値を取得する平均値取得部と、前記平均値取得部で得られた複数の無線測距値の平均値から列車初期位置を決定する初期位置決定部とを備えることを特徴とする。
【0007】
前記平均値取得部は、N回分の無線測距値の平均である旧平均値と新たに前記無線測距値取得手段によって得られたN+1回目の無線測距値とを平均した新平均値を算出し、前記新平均値を記憶する記憶部をさらに備えていると好適である。
【0008】
好適には、前記無線測距値取得手段と前記平均値取得部との間に介在されるフィルタ手段をさらに備え、前記フィルタ手段は、前記無線測距値取得手段から得られた無線測距値のうち許容数値範囲内にあるものだけを前記平均値取得部に出力する。
【0009】
前記フィルタ手段における許容数値範囲は、前記無線測距値取得手段から得られた複数の無線測距値を平均した基準値に応じて決定されており、前記フィルタ手段のフィルタ作用は、前記基準値に基づく許容数値範囲が決定された後に機能すると好適である。
【0010】
好適には、フィルタ作用が機能後に、前記無線測距値取得手段から得られた無線測距値のうち許容数値範囲内にあるものが所定個数、所定割合又は所定時間、出現しない場合には、前記基準値を再決定するか或いは異常報知を行う。
【0011】
上記と同目的を達成するため、本発明は、列車初期位置決定方法も提供する。すなわち、本発明に係る列車初期位置決定方法は、停止している列車の位置から初期位置を決定する方法であって、停止中の列車の位置を無線測距値として複数回取得し、複数の無線測距値の平均値を取得し、前記平均値から列車初期位置を決定することを特徴とする。
【発明の効果】
【0012】
列車の停止中に複数回、無線測距値を取得し、それらの平均化処理を行うことにより、無線測距値を利用しながらも、列車の初期位置を正確に決定することができる。
【0013】
なお、本発明の他の特徴及びそれによる作用効果は、添付図面を参照し、実施の形態によって更に詳しく説明する。
【発明を実施するための最良の形態】
【0014】
以下、この発明に係る実施の形態を、添付図面に基づいて説明する。なお、図中、同一符号は同一又は対応部分を示すものとする。
【0015】
図1に、本発明の第1の実施の形態に係る列車初期位置決定装置の構成を示す。図2は、現場での列車や無線機を現したイメージ図である。
【0016】
図1に示されるように、列車初期位置決定装置1は主に、無線測距値取得手段3と、平均値取得部5と、初期位置決定部7と、記憶部9と、タイマー手段11とを備える。初期位置決定部7には、平均値取得部5及びタイマー手段11がそれぞれ接続されており、さらに平均値取得部5には無線測距値取得手段3及び記憶部9がそれぞれ接続されている。
【0017】
無線測距値取得手段3は、停止中の列車の位置を無線測距値として取得することができる。具体的に無線によって列車までの位置を距離値として計測する方法については周知の方法でよいため、その詳細な説明は省略する。
【0018】
平均値取得部5は、無線測距値取得手段3で得られた複数の無線測距値の平均値を算出する。記憶部9は、平均値取得部5で得られた複数の無線測距値の平均値を記憶する部分である。
【0019】
初期位置決定部7は、平均値取得部5で得られた複数の無線測距値の平均値から列車初期位置を決定する。なお、初期位置決定部7は、初期位置の決定のみを行う部分という意味ではなく、少なくとも初期位置の決定を行う部分であり、他の処理や判断を行う部分であってもよい。タイマー手段11は、無線測距値の測定を基準に定義した時間(例えば測定開始からの時間)または無線測距値の測定回数をカウントし、その情報を初期位置決定部7に送る。
【0020】
さらに、初期位置決定部7には、列車初期位置決定装置1とは別の他の装置における列車停止判定部13が接続されている。列車停止判定部13は、列車の位置に関する無線測距値が停止中の列車のものであることを確認すべく、初期位置決定部7に列車が停止状態にあるか否かの情報を送る。
【0021】
なお、かかる列車停止判定部13は、列車初期位置決定装置1の一部として取り込まれていてもよく、本発明では、概念的に列車停止判定部13が列車初期位置決定装置1の一部かあるいは別の装置の一部であるかは特に問わない。
【0022】
図2に基づいて、無線測距値取得手段3の構成について説明する。無線測距値取得手段3は、車上無線機15と、沿線無線機17と、駅無線機19とを備えている。車上無線機15は、軌道21上に設けられた列車23と一体的に取り付けられている。沿線無線機17は、軌道21に沿って間隔を有して複数設けられている。また、駅無線機19は、地上装置25と、対応する沿線無線機17とを連絡するように設けられている。なお、平均値取得部5、初期位置決定部7、記憶部9及びタイマー手段11は、地上装置25内に設けられている。
【0023】
次に図3に基づいて本実施の形態に係る列車初期位置決定方法について説明する。列車初期位置の決定が開始されると、まず、ステップS1として、列車停止判定部13で得られた情報に基づいて列車23が停止しているか否かが判断される。列車が停止状態にある場合には、次の処理に進む。一方、列車が停止状態にない場合には、列車の初期位置決定は終了される。なお、列車が動いている場合には別の手段で初期位置を決定する。
【0024】
ステップS1において列車が停止状態にあると判断された場合には、ステップS2として、無線測距値取得手段3によって列車の位置を示す無線測距値が取得される。1回目の無線測距値は、そのまま記憶部9に記憶保存される。よって、1回目の無線測距値取得においては、ステップS3を通過してステップS4の処理に移行する。
【0025】
ステップS4においては、タイマー手段11からの情報を検討する。すなわち、タイマー手段11では、例えば無線測距値の測定を開始してからの測定時間または無線測距値の測定回数がカウントされており、カウント時間または回数が一定時間または一定回数を超過しているか否かを判断する。かかる一定時間または一定回数の値は十分な値がとられているため、1回目の無線測距値取得においては、当然に超過していないものと判断され、ステップS5に進む。ステップS5においては、無線測距値の平均値が適正な値に収束しているか否かが判断されるが、かかる処理においても、十分なサンプリングがなされていない段階では収束とは評価されないようになっているため、ステップS2に戻る。
【0026】
ステップS2においては、無線測距値取得手段3によって2回目の無線測距値が取得される。次に、ステップS3として、無線測距値の平均値が取得される。すなわち、平均値取得部5には、記憶部9から1回目の無線測距値が入力されると共に、無線測距値取得手段3から2回目の無線測距値が入力される。これより、平均値取得部5においては、2個分の無線測距値の平均値が求められ、その値が記憶部9に送られて記憶保存される。
【0027】
続いて、ステップS4及びステップS5において、上記と同様に、一定時間等の経過及び平均値収束がチェックされ、ステップS2に戻る。ステップS2においては、無線測距値取得手段3によって3回目の無線測距値が取得される。続いて、ステップS3として、無線測距値の新たな平均値が取得される。すなわち、平均値取得部5には、記憶部9から、前回得られた2個分の無線測距値の平均値が入力されると共に、無線測距値取得手段3から、3回目の無線測距値が入力される。これより、平均値取得部5においては、3個分の無線測距値の平均値が新たに求められ、その値が記憶部9に送られて記憶保存される。
【0028】
このような平均値取得のイメージを図4に示す。1回目の無線測距値と、2回目の無線測距値との平均値として、2個分の無線測距値の平均値が取得される。次に、3回目の無線測距値と、2個分の無線測距値の平均値とから、新たな平均値として3個分の無線測距値の平均値が取得される。以降同様にして、N+1回目の無線測距値と、N個分の無線測距値の平均値とから、N+1個分の無線測距値の平均値が取得される。よって、N+1回目の無線測距値が得られると、平均化処理を行い、記憶部9内にそれまで記憶されていたN個分の無線測距値の平均値が、新たに取得したN+1個分の無線測距値の平均値へと書き換えられていくものと捉えることができる。
【0029】
図3のフローチャートに戻り、ステップS5においては、無線測距値の平均値が適正な値に収束しているか否かが判断される。すなわち、記憶部9に記憶されている、その時点で最も新しいN+1個分の無線測距値の平均値が、予め決められた所定の数値範囲内に入っているか否かが判断される。その結果、無線測距値の平均値が適正な値に収束していないと判断された場合には、ステップS2に戻り、更に戻った際、ステップS4において、カウント時間または回数が一定時間または一定回数を超過しているものと判断されると、列車の初期位置決定は終了され、例えばその旨を報知するなどの処理を行うこともできる。一方、ステップS5において無線測距値の平均値が適正な値に収束していると判断された場合には、かかる平均値から列車23の位置を特定し、列車初期位置が決定される。
【0030】
このようにして本実施の形態によれば、列車23の停止中に複数回、無線測距値を取得し、それらの平均化処理を行うことにより、無線測距値を利用しながらも、列車の初期位置を正確に決定することができる。また、複数個分の無線測距値の平均化処理を一度に行わず、新たな無線測距値を取得する毎にそれまでの平均値に対して更に平均化処理を実施する態様であるため、記憶部9における負担が少なくて済む。これは、現実の実施では、軌道21上に列車23は1本だけではなく多数本存在しており、さらにその軌道21も多数存在しているため、結果的には処理設備や記憶設備の多大な負担軽減効果を得ることができる。
【0031】
次に、図5及び図6を用いて、本発明における第2の実施の形態について説明する。図5に示されるように、本実施の形態に係る列車初期位置決定装置101は、前述した第1の実施の形態において、無線測距値取得手段3と平均値取得部5との間にフィルタ手段104が設けられているものである。フィルタ手段104は、本実施の形態ではいわゆるカルマンフィルタとして機能するものである。 フィルタ手段104は、無線測距値取得手段3から得られた無線測距値のうち許容数値範囲内にあるものだけを平均値取得部5に出力する。かかる許容数値範囲は、無線測距値取得手段3から得られた複数の無線測距値を平均した基準値に応じて決定される。よって、図5中に一点鎖線で示されるように、無線測距値取得手段3と平均値取得部5との間には、フィルタ手段104を介さずに無線測距値を平均値取得部5に送る情報伝達経路が設けられ、平均値取得部5とフィルタ手段104との間には、平均値取得部5において複数の無線測距値を平均することで得た基準値をフィルタ手段104に送る情報伝達経路が設けられている。
【0032】
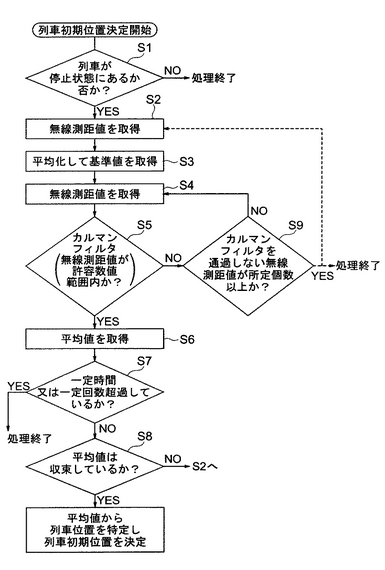
次に、図6に基づいて第2の実施の形態に係る列車初期位置決定方法について説明する。列車初期位置の決定が開始されると、まず、ステップS1として、列車停止判定部13で得られた情報に基づいて列車23が停止しているか否かが判断される。列車が停止状態にある場合には、次の処理に進む。一方、列車が停止状態にない場合には、列車の初期位置決定は終了される。
【0033】
ステップS1において列車が停止状態にあると判断された場合には、ステップS2として、無線測距値取得手段3によって列車の位置を示す無線測距値が取得される。さらに、ステップS3として、無線測距値を平均化してフィルタ手段104で用いる基準値を取得する。この平均化の態様としては、複数の無線測距値をまとめて取得しそれを平均化する態様でもよく、あるいは、上記図4のイメージに示したように無線測距値を取得する毎にそれまでの平均値との平均化を図る態様でもよい。
【0034】
続いて、ステップS4として、無線測距値取得手段3によって列車の位置を示す無線測距値が取得される。次に、ステップS5として、無線測距値をカルマンフィルタに導入する。すなわち、無線測距値取得手段3から無線測距値をフィルタ手段104に送り、フィルタ手段104はその無線測距値が許容数値範囲にあるか否かを判断する。かかる許容数値範囲は、ステップS3で取得した基準値に基づいて定められる。そして、無線測距値が許容数値範囲にある場合には、その無線測距値が記憶部9に記憶保存される。なお、本図6のステップS6、ステップS7及びステップS8は、前述した図3のステップS3、ステップS4及びステップS5と同じである。よって、ステップS4における最初の無線測距値取得においては、単にその無線測距値が記憶部9に記憶保存され、ステップS4に戻る。
【0035】
ステップS4に戻ると、再度、無線測距値取得手段3によって列車の位置を示す無線測距値が取得される。さらに、ステップS5においてカルマンフィルタにかけられ、無線測距値が許容数値範囲にある場合には、ステップS6に進行して、無線測距値の平均値が取得される。ここでの処理も、前述した図4のステップS3と同様であり、N+1回目の無線測距値と、N個分の無線測距値の平均値とから、N+1個分の無線測距値の平均値が取得される。
【0036】
ステップS8は、前述した図4のステップS5と同様であり、無線測距値の平均値が適正な値に収束していないと判断された場合には、ステップS2に戻るが、更に戻った際、ステップS7において、カウント時間または回数が一定時間または一定回数を超過しているものと判断されると、列車の初期位置決定は終了され、例えばその旨を報知するなどの処理を行うこともできる。
【0037】
一方、ステップS8において無線測距値の平均値が適正な値に収束していると判断された場合には、かかる平均値から列車23の位置を特定し、列車初期位置が決定される。
【0038】
また、ステップS5の説明に戻り、取得した無線測距値がカルマンフィルタにかけられ、無線測距値が許容数値範囲内ではないと判断された場合には、ステップS9に進行する。ステップS9では、端的にはカルマンフィルタで用いる基準値すなわち許容数値範囲が適正か否かをチェックする。すなわち、ステップS4における無線測距値の取得を開始してから、つまり、フィルタ手段104のフィルタを機能した後から、ステップS4で取得した無線測距値のうちカルマンフィルタを通過しないもの(許容範囲内にないもの)が所定個数以上となったか否かを判断する。そして、所定個数に満たない場合には、ステップS4の処理に戻る。一方、所定個数以上となった場合には、カルマンフィルタで用いる基準値が適正ではないものとして、ステップS2に戻り基準値を再度決定しなおすか、或いは、処理を終了し、異常報知を行う。
【0039】
このような本実施の形態によれば、第1の実施の形態と同様、無線測距値を利用しながらも、列車の初期位置を正確に決定することができる。また、新たな無線測距値を取得する毎にそれまでの平均値に対して更に平均化処理を実施する態様であるため、記憶部9における負担が少なくて済む。
【0040】
さらに、初期値位置決定のために平均値取得部5に入力される無線測距値は、フィルタ手段104によって制限された許容範囲内のものだけであるため、平均対象のばらつきを小さくすることができ、その分収束時間を短縮することができる。また、カルマンフィルタの基準値を決定するための平均化処理を行うが、本発明は列車の初期値を問題としており、すなわち、列車の停止中に位置検知を行うので位置更新処理に関する応答遅れの問題も生じない。
【0041】
また、本出願人の検討によると無線測距値は正規分布状のばらつきを有しており、正規分布の中心から3σの範囲内の測距確率はガウス分布の場合90%以上となる。よって、基準値にばらつきが含まれる確率は低く、分布の中心から少しずれた値を基準値とした場合でも、その後の測距確率も真値である可能性が高いため平均化していくと真値に近づくことになる。さらに、あまり適切ではない基準値が決定された場合には、図6のステップS9として例示したようにカルマンフィルタを通過しない特定の状態をもって再度、基準値を決定しなおすなどの措置を設けておくことで、徒に処理が長期化したり不適切な値が列車初期位置として決定されてしまうことを防止することができる。
【0042】
以上、好ましい実施の形態を参照して本発明の内容を具体的に説明したが、本発明の基本的技術思想及び教示に基づいて、当業者であれば、種々の改変態様を採り得ることは自明である。
【0043】
本発明は、各構成部が図1や図5のブロック図に示す接続態様であることに限定されるものではなく、当該ブロック図はあくまで一例である。よって、各構成部の機能を奏する部分が存在し、それらが上述したような流れで列車初期位置を決定することができれば特に限定されるものではない。また、当該ブロック図の各構成部はそれぞれ一つの部分として明確に形成されている必要はなく、よって、例えば当該ブロック図の複数の構成部が一つのコンピュータなどの処理装置で実現されるものであってもよく、逆に、当該ブロック図の一つの構成部が複数の部品又は装置で実現されるものであってもよい。
【0044】
図6のステップS9においては、カルマンフィルタで用いる基準値すなわち許容数値範囲が適正なものであるか否かをチェックできればよく、要するに、フィルタ作用が機能後に、無線測距値取得手段から得られた無線測距値のうち許容数値範囲内にあるものが所定個数、所定割合又は所定時間、出現しないか否かを判断できればよい。上記実施の形態の具体的な説明は、これらのうち個数に着目した判断態様の例示である。
【図面の簡単な説明】
【0045】
【図1】本発明の第1の実施の形態に係る列車初期位置決定装置の概要構成を示すブロック図である。
【図2】現場での列車や無線機を現すイメージ図である。
【図3】図1の装置における列車の初期位置決定方法を示すフローチャートである。
【図4】平均値取得のイメージを示す図である。
【図5】本発明の第2の実施の形態に係る列車初期位置決定装置の概要構成を示すブロック図である。
【図6】図5の装置における列車の初期位置決定方法を示すフローチャートである。
【符号の説明】
【0046】
1、101 列車初期位置決定装置
3 無線測距値取得手段
5 平均値取得部
7 初期位置決定部
9 記憶部
23 列車
104 フィルタ手段
【特許請求の範囲】
【請求項1】
停止している列車の位置から初期位置を決定する装置であって、
停止中の列車の位置を無線測距値として複数回取得する無線測距値取得手段と、
前記無線測距値取得手段で得られた複数の無線測距値の平均値を取得する平均値取得部と、
前記平均値取得部で得られた複数の無線測距値の平均値から列車初期位置を決定する初期位置決定部と
を備えることを特徴とする列車初期位置決定装置。
【請求項2】
前記平均値取得部は、
N回分の無線測距値の平均である旧平均値と
新たに前記無線測距値取得手段によって得られたN+1回目の無線測距値と
を平均した新平均値を算出し、
前記新平均値を記憶する記憶部をさらに備える、
ことを特徴とする請求項1に記載の列車初期位置決定装置。
【請求項3】
前記無線測距値取得手段と前記平均値取得部との間に介在されるフィルタ手段をさらに備え、
前記フィルタ手段は、前記無線測距値取得手段から得られた無線測距値のうち許容数値範囲内にあるものだけを前記平均値取得部に出力する、
ことを特徴とする請求項1又は2に記載の列車初期位置決定装置。
【請求項4】
前記フィルタ手段における許容数値範囲は、前記無線測距値取得手段から得られた複数の無線測距値を平均した基準値に応じて決定されており、
前記フィルタ手段のフィルタ作用は、前記基準値に基づく許容数値範囲が決定された後に機能する、
ことを特徴とする請求項3に記載の列車初期位置決定装置。
【請求項5】
フィルタ作用が機能後に、前記無線測距値取得手段から得られた無線測距値のうち許容数値範囲内にあるものが所定個数、所定割合又は所定時間、出現しない場合には、前記基準値を再決定するか或いは異常報知を行うことを特徴とする請求項4に記載の列車初期位置決定装置。
【請求項6】
停止している列車の位置から初期位置を決定する方法であって、
停止中の列車の位置を無線測距値として複数回取得し、
複数の無線測距値の平均値を取得し、
前記平均値から列車初期位置を決定する
ことを特徴とする列車初期位置決定方法。
【請求項1】
停止している列車の位置から初期位置を決定する装置であって、
停止中の列車の位置を無線測距値として複数回取得する無線測距値取得手段と、
前記無線測距値取得手段で得られた複数の無線測距値の平均値を取得する平均値取得部と、
前記平均値取得部で得られた複数の無線測距値の平均値から列車初期位置を決定する初期位置決定部と
を備えることを特徴とする列車初期位置決定装置。
【請求項2】
前記平均値取得部は、
N回分の無線測距値の平均である旧平均値と
新たに前記無線測距値取得手段によって得られたN+1回目の無線測距値と
を平均した新平均値を算出し、
前記新平均値を記憶する記憶部をさらに備える、
ことを特徴とする請求項1に記載の列車初期位置決定装置。
【請求項3】
前記無線測距値取得手段と前記平均値取得部との間に介在されるフィルタ手段をさらに備え、
前記フィルタ手段は、前記無線測距値取得手段から得られた無線測距値のうち許容数値範囲内にあるものだけを前記平均値取得部に出力する、
ことを特徴とする請求項1又は2に記載の列車初期位置決定装置。
【請求項4】
前記フィルタ手段における許容数値範囲は、前記無線測距値取得手段から得られた複数の無線測距値を平均した基準値に応じて決定されており、
前記フィルタ手段のフィルタ作用は、前記基準値に基づく許容数値範囲が決定された後に機能する、
ことを特徴とする請求項3に記載の列車初期位置決定装置。
【請求項5】
フィルタ作用が機能後に、前記無線測距値取得手段から得られた無線測距値のうち許容数値範囲内にあるものが所定個数、所定割合又は所定時間、出現しない場合には、前記基準値を再決定するか或いは異常報知を行うことを特徴とする請求項4に記載の列車初期位置決定装置。
【請求項6】
停止している列車の位置から初期位置を決定する方法であって、
停止中の列車の位置を無線測距値として複数回取得し、
複数の無線測距値の平均値を取得し、
前記平均値から列車初期位置を決定する
ことを特徴とする列車初期位置決定方法。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2006−240593(P2006−240593A)
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願番号】特願2005−62782(P2005−62782)
【出願日】平成17年3月7日(2005.3.7)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願日】平成17年3月7日(2005.3.7)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]