
搬送装置と処理装置との間の位置合わせ機構
【課題】 簡単かつ低コストな構成でありながら、処理装置と搬送装置の位置合わせを容易かつ正確に行うことができるようにして、作業能率を大幅に改善することができる搬送装置と処理装置との間の位置合わせ機構を提供することを目的とする。
【解決手段】 本発明は、環状連続体110の回転により被搬送物を搬送する搬送装置100と、搬送装置100により搬送される被搬送物に対して所定の処理を施す処理装置200と、の間の位置合わせ機構であって、搬送装置100を、環状連続体110及び駆動軸131を支持するフレーム101と、前記フレーム101を分離可能に支持する支持台150と、を含んで構成し、駆動軸131と、出力軸220と、の芯合わせを行った後、駆動軸131を支持するフレーム101と、支持台150と、の間の高さ調整を行うことを特徴とする。
【解決手段】 本発明は、環状連続体110の回転により被搬送物を搬送する搬送装置100と、搬送装置100により搬送される被搬送物に対して所定の処理を施す処理装置200と、の間の位置合わせ機構であって、搬送装置100を、環状連続体110及び駆動軸131を支持するフレーム101と、前記フレーム101を分離可能に支持する支持台150と、を含んで構成し、駆動軸131と、出力軸220と、の芯合わせを行った後、駆動軸131を支持するフレーム101と、支持台150と、の間の高さ調整を行うことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送装置と処理装置との間の位置合わせ機構に関する。
【背景技術】
【0002】
従来より、食品その他の被搬送物を載置して移送する搬送装置として、例えば、図5に示すようなコンベア(搬送装置)がある。
このものは、いわゆるスラットコンベア(Slat Conveyer)と称されるもので、図5に示したように、電動モータ等により回転駆動される駆動側スプロケットと被駆動側(従動側)スプロケットに巻き掛けられたエンドレスチェーン(無端チェーン)の外周に、比較的幅の狭いスラット(金属、樹脂などからなる板状部材)をその長手方向がエンドレスチェーン(無端チェーン)の進行方向に対して略直交するように複数取り付けて構成され、このスラット上に被搬送物を載置して搬送するようにしたものである。
【0003】
また、特許文献1には、同種のスラットコンベアが記載されている。
【0004】
更に、このようなスラットコンベア等の搬送装置においては、エンドレスチェーンの外周に取り付けられたスラット上に被搬送物を整列させて搬送しながら、被搬送物に対して何らかの処理を施すような処理装置のための搬送装置としての利用も想定され、かかる場合には、被搬送物を載せるトレイ状のアタッチメント等をスラット上に取り付けることが要求される。
【0005】
このようなアタッチメントを、磁石を用いて、上側アタッチメントと下側アタッチメントとの間で、上側アタッチメントを着脱自在に構成した搬送装置を、本願出願人は、特許文献2において提案している(図6等参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−268810号公報
【特許文献2】実用新案登録第3173953号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ここにおいて、このようなスラットコンベア式の搬送装置を、前述したような処理装置の搬送装置として利用する場合、処理装置との位置合わせが必要となる。
【0008】
特に、処理装置に備えられている駆動源(電動モータ等)の動力を利用して、コンベア(搬送装置)を駆動しようとするような場合には、処理装置側の出力軸と、コンベア装置側の駆動軸(入力軸)と、を芯合わせして、両者を連結する必要がある。
【0009】
このため、従来は、図7に示すように、処理装置側の高さに、コンベア(搬送装置)側の高さを合わせることできるように、高さ調整ボルト付きの車輪(キャスター)等を介してコンベア(搬送装置)の床面からの高さを調整可能に構成していた。
【0010】
しかしながら、床面を基準として高さ調整を行う場合、コンベア(搬送装置)側の高さ調整ボルトを調整して処理装置側の高さに合わせるが、床面は水はけの要請や施工上の問題から平坦でないことが多く、このため高さ調整作業が非常に困難である。
【0011】
更に、一番低い位置にセットしてもなおコンベア(搬送装置)側の高さの方が処理装置側より高い場合もあり、かかる場合には、処理装置側の高さを上げなければならず、高さ調整作業が非常に煩雑なものとなっていた。
【0012】
また、一旦高さ調整を行っても、処理装置や搬送装置を別の場所に移動させた場合には、再度面倒な調整が必要となる場合もあるため、作業効率が極めて悪いといった問題があった。
【0013】
なお、処理装置側の出力軸と、コンベア(搬送装置)側の駆動軸と、は、キー溝係合或いはスプライン係合により連結されるため、比較的精度の高い位置合わせ(芯合わせ)が必要であり、このことが、位置合わせ作業を一層煩雑にしている。
【0014】
本発明は、かかる従来の実情に鑑みなされたもので、簡単かつ低コストな構成でありながら、処理装置と搬送装置の位置合わせを容易かつ正確に行うことができるようにして、作業能率を大幅に改善することができる搬送装置と処理装置との間の位置合わせ機構を提供することを目的とする。
【課題を解決するための手段】
【0015】
このため、本発明は、
被搬送物の搬送方向に延在されて回転される環状連続体と、当該環状連続体に回転動力を与える駆動軸と、を含んで構成され、前記環状連続体の回転により被搬送物を搬送する搬送装置と、
前記搬送装置が着脱可能に係合されると共に、前記駆動軸に回転動力を供給する出力軸を有し、前記搬送装置により搬送される被搬送物に対して所定の処理を施す処理装置と、
の間の位置合わせ機構であって、
前記搬送装置を、前記環状連続体及び駆動軸を支持するフレームと、前記フレームを分離可能に支持する支持台と、を含んで構成し、
前記搬送装置の駆動軸と、前記処理装置の出力軸と、の芯合わせを行った後、前記駆動軸を支持するフレームと、前記支持台と、の間の高さ調整を行うことを特徴とする。
【0016】
また、本発明において、前記支持台は車輪を有して構成され、前記搬送装置が、前記処理装置から独立して移動可能であることを特徴とすることができる。
【発明の効果】
【0017】
本発明によれば、簡単かつ低コストな構成でありながら、処理装置と搬送装置の位置合わせを容易かつ正確に行うことができるようにして、作業能率を大幅に改善することができる搬送装置と処理装置との間の位置合わせ機構を提供することができる。
【図面の簡単な説明】
【0018】
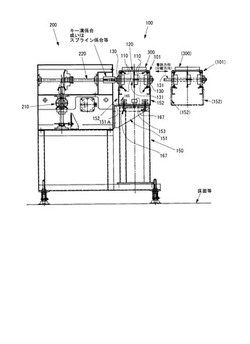
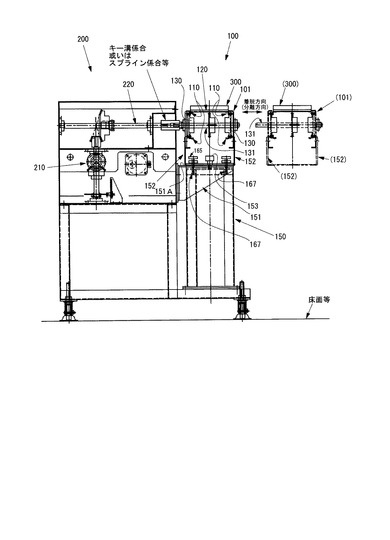
【図1】本発明の一実施の形態に係る処理装置と搬送装置(コンベア)との結合状態及び搬送装置(コンベア)を取り外した状態を示す図(搬送方向上流側から見た図)である。
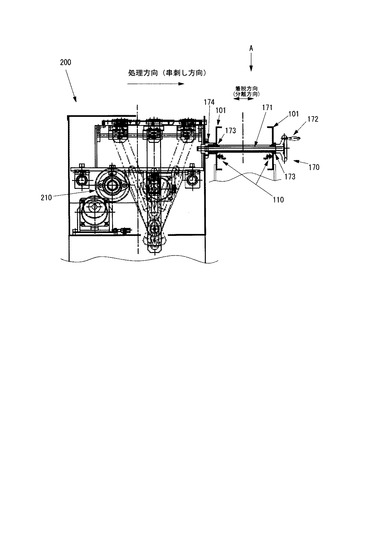
【図2】図1の処理装置と搬送装置(コンベア)の一部を示す右側面図(搬送方向側方から見た図)である。
【図3】同上実施の形態の処理装置と搬送装置(コンベア)の接続機構を拡大して示す断面図(搬送方向上流側から見た図)である。
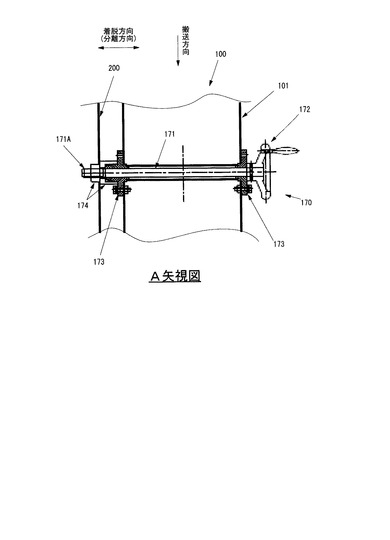
【図4】同上実施の形態の接続機構を抜き出して示す断面図(図3のA矢視図)である。
【図5】従来のスラットコンベアの構成例を示す図である。
【図6】特許文献2の磁石を利用してアタッチメントをスラットに着脱可能に取り付けたスラットコンベアの構成例を示す側面図である。
【図7】従来の処理装置に対して、高さ調整ボルト付きの車輪(キャスター)等により高さ調整を行うコンベア(搬送装置)を説明するための斜視図である。
【発明を実施するための形態】
【0019】
以下に、本発明の一例を示す実施の形態について、添付の図面を参照しつつ説明する。なお、以下で説明する実施の形態により、本発明が限定されるものではない。
【0020】
本実施の形態に係る搬送装置100は、被搬送物を搬送する搬送装置(コンベア)であって、例えば、食品に対して処理を施す処理装置(例えば、串刺し装置)200のための搬送装置として利用可能である。
【0021】
図1に示すように、本実施の形態に係るコンベア(搬送装置)100は、環状連続体としてのエンドレスチェーン(無端チェーン)110が、フレーム101に回転自在に支持されている駆動スプロケット(及び被駆動スプロケット)(図では駆動スプロケットを表示)130に巻き掛けられている。
【0022】
そして、エンドレスチェーン110の外周側には、図1に示すように、スラット(板状部材)120が複数並設され。このスラット120には、アタッチメント(着脱可能アタッチメント)300が取り付けられている。
【0023】
なお、このアタッチメント300に被搬送物(図示せず)が収容されて搬送され、処理装置(例えば、串刺し装置)200にて所定の処理(例えば、串刺し処理)が被搬送物に対してなされることになる。
【0024】
本実施の形態では、コンベア(搬送装置)100の駆動スプロケット130が取り付けられる駆動軸131に入力される回転動力は、図1に示すように、処理装置200に備えられている電動モータ210により回転駆動される出力軸220から供給される。
【0025】
このため、駆動軸131と、出力軸220と、は、例えば、キー溝係合やスプライン係合等を介して回転連結される構成となっている。
なお、駆動軸131と、出力軸220と、は、軸方向に着脱可能で、これにより、駆動軸131と、出力軸220と、は切り離し可能に構成され、延いては、コンベア(搬送装置)100は、処理装置200から切り離されて、独立して移動可能となっている。
【0026】
従って、コンベア(搬送装置)100を単独で清掃等の処理に供することができるため、コンベア(搬送装置)100を容易に衛生的に維持することなどが可能となっている。
【0027】
また、駆動軸131を回転自在に支持するフレーム101は、コンベア(搬送装置)100の支持台150に着脱可能に支持される構成となっている。
【0028】
なお、支持台150は、車輪(キャスター)等を備えることで移動可能に構成することができるが、これに限定されるものではなく、処理装置200に支持台150を略一体に取り付けた構成とすることもできる。
【0029】
ここで、本実施の形態に係るコンベア(搬送装置)100の処理装置200との位置合わせ(駆動軸131と出力軸220の芯合わせ)について説明する。
ステップ1で、作業者(或いは設置者)は、本実施の形態に係るコンベア(搬送装置)100は、フレーム101を、支持台150のブラケット151に載置する。
【0030】
ブラケット151は、図1平面において上面の一辺が略水平配置された水平支持面151Aを有する略三角形形状に構成されている。ブラケット151は、フレーム101(コンベア(搬送装置)100)の長手方向に沿って複数配設されている。
【0031】
ステップ2では、作業者は、フレーム101を持ち上げて、駆動軸131を、キー溝係合或いはスプライン係合等を介して、処理装置200側の出力軸220に挿入する。このとき、仮支持機構160の高さ調整機能付きボルト165の高さ調整を行いつつ、フレーム101を支持台150に仮に支持させる。
【0032】
仮支持機構160は、図1、図2に示すように、支持台150に取り付けられる水平ブラケット161と、フレーム101に取り付けられるブラケット162と、ブラケット162と水平ブラケット161とを接続させる接続ブラケット163と、接続ブラケット163と水平ブラケット161とを係合させる係合ボルト164と、接続ブラケット163とブラケット162とを係合させると共にブラケット162の下面から突出される高さ調整機能付きボルト165と、を備えて構成されている。
【0033】
作業者は、フレーム101を持ち上げて、駆動軸131を出力軸220に挿入して係合させる際に、水平ブラケット161の上に、ブラケット162に接続ブラケット163を挟みつつ羅合されている高さ調整機能付きボルト165を介して、フレーム101を載置する。
【0034】
そして、円滑に駆動軸131を出力軸220に挿入して係合させることができるように、高さ調整機能付きボルト165を所定に回転させてブラケット162の下面からの突出量を調整して高さ調整を行う。高さ調整ができたら、駆動軸131を出力軸220に挿入して係合させる一方で、高さ調整機能付きボルト165に羅合されているナット166を回転させてブラケット162に接続ブラケット163を締め付けると共に、長穴167に挿通されているボルト164を締結することで、フレーム101と支持台150とを係合させる。
【0035】
これにより、駆動軸131を出力軸220に容易に係合させることができる一方で、フレーム101を支持台150に仮に支持させることができる。
【0036】
ステップ3では、作業者は、フレーム101に取り付けられるブラケット152の下面をブラケット151の水平支持面151Aの上面に当接させるように、支持台150側のブラケット151を長穴154を介して高さを調整しつつ支持台150に固定すると共に、ボルト153を介して、フレーム101側のブラケット152と、支持台150側のブラケット151とを締結固定する。
【0037】
これにより、駆動軸131を、キー溝係合或いはスプライン係合等を介して、出力軸220に係合させた状態で、しっかりとフレーム101と支持台150を固定することができる。
【0038】
ステップ4では、作業者は、フレーム101に設けられている接続機構170を介して、コンベア(搬送装置)100と、処理装置200と、を締結させる。
【0039】
接続機構170は、先端(処理装置200側)にネジ部171Aを有するネジ軸171と、このネジ軸171を回転させるためのハンドル172と、ネジ軸171を回転自在にフレーム101に支持するベアリング部173と、処理装置200側に設けられるネジ結合部174と、を含んで構成されている。
なお、接続機構170は、フレーム101(コンベア(搬送装置)100)の長手方向に沿って複数配設されている。
【0040】
作業者は、駆動軸131を出力軸220に正確に連結させた状態で、かつ、フレーム101と支持台150とをしっかりと固定した状態において、処理装置200側に設けられるネジ結合部174にネジ軸171の先端のネジ部171Aをセットし、ハンドル172を回転させて、両者を羅合させて締結固定する。
これにより、コンベア(搬送装置)100と、処理装置200と、が結合され、処理装置200での処理(例えば、串刺し処理など)を行う準備が完了したことになる。
【0041】
このように、本実施の形態に係るコンベア(搬送装置)100と処理装置200との位置合わせ(駆動軸131と出力軸220の芯合わせ)方法によれば、先に、駆動軸131と出力軸220の芯合わせを行い、その後において、駆動軸131を支持するフレーム101を支持台150の高さに調整するようにしたので、従来のように、床面を基準として高さ調整を行う場合に比べ、大幅に位置合わせの作業を容易なものとすることができ、作業時間の短縮化延いては作業能率の改善を図ることができる。
【0042】
すなわち、本実施の形態によれば、簡単かつ低コストな構成でありながら、処理装置200と搬送装置100の位置合わせを容易かつ正確に行うことができ、作業能率を大幅に改善することができる搬送装置の位置合わせ機構を提供することができる。
【0043】
なお、本実施の形態では、エンドレスチェーンにスラットを取り付けた場合を一例として説明したが、本発明はこれに限定されるものではなく、エンドレスベルト(無端の環状連続体)の周囲に、アタッチメント300などを着脱自在に取り付けたような構成の搬送装置にも適用可能である。
【0044】
以上で説明した実施の形態は、本発明を説明するための例示に過ぎず、本発明の要旨を逸脱しない範囲内において、種々変更を加え得ることは可能である。
【符号の説明】
【0045】
100 コンベア(搬送装置)
101 フレーム
110 エンドレスチェーン(無端の環状連続体)
120 スラット(板状部材)
130 駆動スプロケット
131 駆動軸
150 支持台
151 ブラケット
151A 水平支持面
160 仮支持機構
161 水平ブラケット
162 ブラケット
163 接続ブラケット
164 係合ボルト
165 高さ調整機能付きボルト
167 長穴
200 処理装置(例えば、串刺し装置)
210 電動モータ
220 出力軸
【技術分野】
【0001】
本発明は、搬送装置と処理装置との間の位置合わせ機構に関する。
【背景技術】
【0002】
従来より、食品その他の被搬送物を載置して移送する搬送装置として、例えば、図5に示すようなコンベア(搬送装置)がある。
このものは、いわゆるスラットコンベア(Slat Conveyer)と称されるもので、図5に示したように、電動モータ等により回転駆動される駆動側スプロケットと被駆動側(従動側)スプロケットに巻き掛けられたエンドレスチェーン(無端チェーン)の外周に、比較的幅の狭いスラット(金属、樹脂などからなる板状部材)をその長手方向がエンドレスチェーン(無端チェーン)の進行方向に対して略直交するように複数取り付けて構成され、このスラット上に被搬送物を載置して搬送するようにしたものである。
【0003】
また、特許文献1には、同種のスラットコンベアが記載されている。
【0004】
更に、このようなスラットコンベア等の搬送装置においては、エンドレスチェーンの外周に取り付けられたスラット上に被搬送物を整列させて搬送しながら、被搬送物に対して何らかの処理を施すような処理装置のための搬送装置としての利用も想定され、かかる場合には、被搬送物を載せるトレイ状のアタッチメント等をスラット上に取り付けることが要求される。
【0005】
このようなアタッチメントを、磁石を用いて、上側アタッチメントと下側アタッチメントとの間で、上側アタッチメントを着脱自在に構成した搬送装置を、本願出願人は、特許文献2において提案している(図6等参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−268810号公報
【特許文献2】実用新案登録第3173953号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ここにおいて、このようなスラットコンベア式の搬送装置を、前述したような処理装置の搬送装置として利用する場合、処理装置との位置合わせが必要となる。
【0008】
特に、処理装置に備えられている駆動源(電動モータ等)の動力を利用して、コンベア(搬送装置)を駆動しようとするような場合には、処理装置側の出力軸と、コンベア装置側の駆動軸(入力軸)と、を芯合わせして、両者を連結する必要がある。
【0009】
このため、従来は、図7に示すように、処理装置側の高さに、コンベア(搬送装置)側の高さを合わせることできるように、高さ調整ボルト付きの車輪(キャスター)等を介してコンベア(搬送装置)の床面からの高さを調整可能に構成していた。
【0010】
しかしながら、床面を基準として高さ調整を行う場合、コンベア(搬送装置)側の高さ調整ボルトを調整して処理装置側の高さに合わせるが、床面は水はけの要請や施工上の問題から平坦でないことが多く、このため高さ調整作業が非常に困難である。
【0011】
更に、一番低い位置にセットしてもなおコンベア(搬送装置)側の高さの方が処理装置側より高い場合もあり、かかる場合には、処理装置側の高さを上げなければならず、高さ調整作業が非常に煩雑なものとなっていた。
【0012】
また、一旦高さ調整を行っても、処理装置や搬送装置を別の場所に移動させた場合には、再度面倒な調整が必要となる場合もあるため、作業効率が極めて悪いといった問題があった。
【0013】
なお、処理装置側の出力軸と、コンベア(搬送装置)側の駆動軸と、は、キー溝係合或いはスプライン係合により連結されるため、比較的精度の高い位置合わせ(芯合わせ)が必要であり、このことが、位置合わせ作業を一層煩雑にしている。
【0014】
本発明は、かかる従来の実情に鑑みなされたもので、簡単かつ低コストな構成でありながら、処理装置と搬送装置の位置合わせを容易かつ正確に行うことができるようにして、作業能率を大幅に改善することができる搬送装置と処理装置との間の位置合わせ機構を提供することを目的とする。
【課題を解決するための手段】
【0015】
このため、本発明は、
被搬送物の搬送方向に延在されて回転される環状連続体と、当該環状連続体に回転動力を与える駆動軸と、を含んで構成され、前記環状連続体の回転により被搬送物を搬送する搬送装置と、
前記搬送装置が着脱可能に係合されると共に、前記駆動軸に回転動力を供給する出力軸を有し、前記搬送装置により搬送される被搬送物に対して所定の処理を施す処理装置と、
の間の位置合わせ機構であって、
前記搬送装置を、前記環状連続体及び駆動軸を支持するフレームと、前記フレームを分離可能に支持する支持台と、を含んで構成し、
前記搬送装置の駆動軸と、前記処理装置の出力軸と、の芯合わせを行った後、前記駆動軸を支持するフレームと、前記支持台と、の間の高さ調整を行うことを特徴とする。
【0016】
また、本発明において、前記支持台は車輪を有して構成され、前記搬送装置が、前記処理装置から独立して移動可能であることを特徴とすることができる。
【発明の効果】
【0017】
本発明によれば、簡単かつ低コストな構成でありながら、処理装置と搬送装置の位置合わせを容易かつ正確に行うことができるようにして、作業能率を大幅に改善することができる搬送装置と処理装置との間の位置合わせ機構を提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施の形態に係る処理装置と搬送装置(コンベア)との結合状態及び搬送装置(コンベア)を取り外した状態を示す図(搬送方向上流側から見た図)である。
【図2】図1の処理装置と搬送装置(コンベア)の一部を示す右側面図(搬送方向側方から見た図)である。
【図3】同上実施の形態の処理装置と搬送装置(コンベア)の接続機構を拡大して示す断面図(搬送方向上流側から見た図)である。
【図4】同上実施の形態の接続機構を抜き出して示す断面図(図3のA矢視図)である。
【図5】従来のスラットコンベアの構成例を示す図である。
【図6】特許文献2の磁石を利用してアタッチメントをスラットに着脱可能に取り付けたスラットコンベアの構成例を示す側面図である。
【図7】従来の処理装置に対して、高さ調整ボルト付きの車輪(キャスター)等により高さ調整を行うコンベア(搬送装置)を説明するための斜視図である。
【発明を実施するための形態】
【0019】
以下に、本発明の一例を示す実施の形態について、添付の図面を参照しつつ説明する。なお、以下で説明する実施の形態により、本発明が限定されるものではない。
【0020】
本実施の形態に係る搬送装置100は、被搬送物を搬送する搬送装置(コンベア)であって、例えば、食品に対して処理を施す処理装置(例えば、串刺し装置)200のための搬送装置として利用可能である。
【0021】
図1に示すように、本実施の形態に係るコンベア(搬送装置)100は、環状連続体としてのエンドレスチェーン(無端チェーン)110が、フレーム101に回転自在に支持されている駆動スプロケット(及び被駆動スプロケット)(図では駆動スプロケットを表示)130に巻き掛けられている。
【0022】
そして、エンドレスチェーン110の外周側には、図1に示すように、スラット(板状部材)120が複数並設され。このスラット120には、アタッチメント(着脱可能アタッチメント)300が取り付けられている。
【0023】
なお、このアタッチメント300に被搬送物(図示せず)が収容されて搬送され、処理装置(例えば、串刺し装置)200にて所定の処理(例えば、串刺し処理)が被搬送物に対してなされることになる。
【0024】
本実施の形態では、コンベア(搬送装置)100の駆動スプロケット130が取り付けられる駆動軸131に入力される回転動力は、図1に示すように、処理装置200に備えられている電動モータ210により回転駆動される出力軸220から供給される。
【0025】
このため、駆動軸131と、出力軸220と、は、例えば、キー溝係合やスプライン係合等を介して回転連結される構成となっている。
なお、駆動軸131と、出力軸220と、は、軸方向に着脱可能で、これにより、駆動軸131と、出力軸220と、は切り離し可能に構成され、延いては、コンベア(搬送装置)100は、処理装置200から切り離されて、独立して移動可能となっている。
【0026】
従って、コンベア(搬送装置)100を単独で清掃等の処理に供することができるため、コンベア(搬送装置)100を容易に衛生的に維持することなどが可能となっている。
【0027】
また、駆動軸131を回転自在に支持するフレーム101は、コンベア(搬送装置)100の支持台150に着脱可能に支持される構成となっている。
【0028】
なお、支持台150は、車輪(キャスター)等を備えることで移動可能に構成することができるが、これに限定されるものではなく、処理装置200に支持台150を略一体に取り付けた構成とすることもできる。
【0029】
ここで、本実施の形態に係るコンベア(搬送装置)100の処理装置200との位置合わせ(駆動軸131と出力軸220の芯合わせ)について説明する。
ステップ1で、作業者(或いは設置者)は、本実施の形態に係るコンベア(搬送装置)100は、フレーム101を、支持台150のブラケット151に載置する。
【0030】
ブラケット151は、図1平面において上面の一辺が略水平配置された水平支持面151Aを有する略三角形形状に構成されている。ブラケット151は、フレーム101(コンベア(搬送装置)100)の長手方向に沿って複数配設されている。
【0031】
ステップ2では、作業者は、フレーム101を持ち上げて、駆動軸131を、キー溝係合或いはスプライン係合等を介して、処理装置200側の出力軸220に挿入する。このとき、仮支持機構160の高さ調整機能付きボルト165の高さ調整を行いつつ、フレーム101を支持台150に仮に支持させる。
【0032】
仮支持機構160は、図1、図2に示すように、支持台150に取り付けられる水平ブラケット161と、フレーム101に取り付けられるブラケット162と、ブラケット162と水平ブラケット161とを接続させる接続ブラケット163と、接続ブラケット163と水平ブラケット161とを係合させる係合ボルト164と、接続ブラケット163とブラケット162とを係合させると共にブラケット162の下面から突出される高さ調整機能付きボルト165と、を備えて構成されている。
【0033】
作業者は、フレーム101を持ち上げて、駆動軸131を出力軸220に挿入して係合させる際に、水平ブラケット161の上に、ブラケット162に接続ブラケット163を挟みつつ羅合されている高さ調整機能付きボルト165を介して、フレーム101を載置する。
【0034】
そして、円滑に駆動軸131を出力軸220に挿入して係合させることができるように、高さ調整機能付きボルト165を所定に回転させてブラケット162の下面からの突出量を調整して高さ調整を行う。高さ調整ができたら、駆動軸131を出力軸220に挿入して係合させる一方で、高さ調整機能付きボルト165に羅合されているナット166を回転させてブラケット162に接続ブラケット163を締め付けると共に、長穴167に挿通されているボルト164を締結することで、フレーム101と支持台150とを係合させる。
【0035】
これにより、駆動軸131を出力軸220に容易に係合させることができる一方で、フレーム101を支持台150に仮に支持させることができる。
【0036】
ステップ3では、作業者は、フレーム101に取り付けられるブラケット152の下面をブラケット151の水平支持面151Aの上面に当接させるように、支持台150側のブラケット151を長穴154を介して高さを調整しつつ支持台150に固定すると共に、ボルト153を介して、フレーム101側のブラケット152と、支持台150側のブラケット151とを締結固定する。
【0037】
これにより、駆動軸131を、キー溝係合或いはスプライン係合等を介して、出力軸220に係合させた状態で、しっかりとフレーム101と支持台150を固定することができる。
【0038】
ステップ4では、作業者は、フレーム101に設けられている接続機構170を介して、コンベア(搬送装置)100と、処理装置200と、を締結させる。
【0039】
接続機構170は、先端(処理装置200側)にネジ部171Aを有するネジ軸171と、このネジ軸171を回転させるためのハンドル172と、ネジ軸171を回転自在にフレーム101に支持するベアリング部173と、処理装置200側に設けられるネジ結合部174と、を含んで構成されている。
なお、接続機構170は、フレーム101(コンベア(搬送装置)100)の長手方向に沿って複数配設されている。
【0040】
作業者は、駆動軸131を出力軸220に正確に連結させた状態で、かつ、フレーム101と支持台150とをしっかりと固定した状態において、処理装置200側に設けられるネジ結合部174にネジ軸171の先端のネジ部171Aをセットし、ハンドル172を回転させて、両者を羅合させて締結固定する。
これにより、コンベア(搬送装置)100と、処理装置200と、が結合され、処理装置200での処理(例えば、串刺し処理など)を行う準備が完了したことになる。
【0041】
このように、本実施の形態に係るコンベア(搬送装置)100と処理装置200との位置合わせ(駆動軸131と出力軸220の芯合わせ)方法によれば、先に、駆動軸131と出力軸220の芯合わせを行い、その後において、駆動軸131を支持するフレーム101を支持台150の高さに調整するようにしたので、従来のように、床面を基準として高さ調整を行う場合に比べ、大幅に位置合わせの作業を容易なものとすることができ、作業時間の短縮化延いては作業能率の改善を図ることができる。
【0042】
すなわち、本実施の形態によれば、簡単かつ低コストな構成でありながら、処理装置200と搬送装置100の位置合わせを容易かつ正確に行うことができ、作業能率を大幅に改善することができる搬送装置の位置合わせ機構を提供することができる。
【0043】
なお、本実施の形態では、エンドレスチェーンにスラットを取り付けた場合を一例として説明したが、本発明はこれに限定されるものではなく、エンドレスベルト(無端の環状連続体)の周囲に、アタッチメント300などを着脱自在に取り付けたような構成の搬送装置にも適用可能である。
【0044】
以上で説明した実施の形態は、本発明を説明するための例示に過ぎず、本発明の要旨を逸脱しない範囲内において、種々変更を加え得ることは可能である。
【符号の説明】
【0045】
100 コンベア(搬送装置)
101 フレーム
110 エンドレスチェーン(無端の環状連続体)
120 スラット(板状部材)
130 駆動スプロケット
131 駆動軸
150 支持台
151 ブラケット
151A 水平支持面
160 仮支持機構
161 水平ブラケット
162 ブラケット
163 接続ブラケット
164 係合ボルト
165 高さ調整機能付きボルト
167 長穴
200 処理装置(例えば、串刺し装置)
210 電動モータ
220 出力軸
【特許請求の範囲】
【請求項1】
被搬送物の搬送方向に延在されて回転される環状連続体と、当該環状連続体に回転動力を与える駆動軸と、を含んで構成され、前記環状連続体の回転により被搬送物を搬送する搬送装置と、
前記搬送装置が着脱可能に係合されると共に、前記駆動軸に回転動力を供給する出力軸を有し、前記搬送装置により搬送される被搬送物に対して所定の処理を施す処理装置と、
の間の位置合わせ機構であって、
前記搬送装置を、前記環状連続体及び駆動軸を支持するフレームと、前記フレームを分離可能に支持する支持台と、を含んで構成し、
前記搬送装置の駆動軸と、前記処理装置の出力軸と、の芯合わせを行った後、前記駆動軸を支持するフレームと、前記支持台と、の間の高さ調整を行うことを特徴とする搬送装置と処理装置との間の位置合わせ機構。
【請求項2】
前記支持台は車輪を有して構成され、前記搬送装置が、前記処理装置から独立して移動可能であることを特徴とする請求項1に記載の搬送装置と処理装置との間の位置合わせ機構。
【請求項1】
被搬送物の搬送方向に延在されて回転される環状連続体と、当該環状連続体に回転動力を与える駆動軸と、を含んで構成され、前記環状連続体の回転により被搬送物を搬送する搬送装置と、
前記搬送装置が着脱可能に係合されると共に、前記駆動軸に回転動力を供給する出力軸を有し、前記搬送装置により搬送される被搬送物に対して所定の処理を施す処理装置と、
の間の位置合わせ機構であって、
前記搬送装置を、前記環状連続体及び駆動軸を支持するフレームと、前記フレームを分離可能に支持する支持台と、を含んで構成し、
前記搬送装置の駆動軸と、前記処理装置の出力軸と、の芯合わせを行った後、前記駆動軸を支持するフレームと、前記支持台と、の間の高さ調整を行うことを特徴とする搬送装置と処理装置との間の位置合わせ機構。
【請求項2】
前記支持台は車輪を有して構成され、前記搬送装置が、前記処理装置から独立して移動可能であることを特徴とする請求項1に記載の搬送装置と処理装置との間の位置合わせ機構。
【図1】


【図2】

【図3】
【図4】
【図5】

【図6】

【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−214298(P2012−214298A)
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【公開請求】
【出願番号】特願2012−125829(P2012−125829)
【出願日】平成24年6月1日(2012.6.1)
【出願人】(511307306)コジマ技研工業有限会社 (2)
【Fターム(参考)】
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願番号】特願2012−125829(P2012−125829)
【出願日】平成24年6月1日(2012.6.1)
【出願人】(511307306)コジマ技研工業有限会社 (2)
【Fターム(参考)】
[ Back to top ]