
搬送装置

【課題】複数台のコンベアを備え、被搬送物が上流側のコンベアから下流側のコンベアへ搬送される搬送装置において、復路用のコンベアを廃止可能にする。
【解決手段】搬送用無端ベルト12、22のうち上側に位置する上側ベルト部120、220に被搬送物Pが載せられて、被搬送物Pが上流側のメインコンベア1から下流側のメインコンベア2へ搬送される搬送装置において、下流側のメインコンベア2の搬送用無端ベルト22のうち下側に位置する下側ベルト部221に載せられて搬送されてきた被搬送物Pを、上流側のメインコンベア1の搬送用無端ベルト22のうち下側に位置する下側ベルト部121にプーリー10、21を迂回して搬送するサブコンベア5を設ける。これにより、メインコンベア1、2の下側ベルト部121、221を復路用として利用することが可能となる。
【解決手段】搬送用無端ベルト12、22のうち上側に位置する上側ベルト部120、220に被搬送物Pが載せられて、被搬送物Pが上流側のメインコンベア1から下流側のメインコンベア2へ搬送される搬送装置において、下流側のメインコンベア2の搬送用無端ベルト22のうち下側に位置する下側ベルト部221に載せられて搬送されてきた被搬送物Pを、上流側のメインコンベア1の搬送用無端ベルト22のうち下側に位置する下側ベルト部121にプーリー10、21を迂回して搬送するサブコンベア5を設ける。これにより、メインコンベア1、2の下側ベルト部121、221を復路用として利用することが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数台のコンベアを備え、被搬送物が上流側のコンベアから下流側のコンベアへ搬送される搬送装置に関するものである。
【背景技術】
【0002】
パレットを使用する従来の搬送装置は、ワークを載せたパレットを搬送するための往路用のコンベアと、空パレットを戻すための復路用のコンベアを用いている。また、長いラインの場合は、往路用、復路用共に、複数台のコンベアを繋いで対応している。さらに、構造の複雑化を避けるために、各コンベアにそれぞれ駆動モーターを設けている。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来の搬送装置は往路用のコンベアと復路用のコンベアを用いているため、水平循環タイプ及び上下循環タイプ共スペースを多く取ってしまうという問題があった。
【0004】
また、各コンベアにそれぞれ駆動モーターを設けているため、コストも高く省エネルギーにも貢献出来ないという問題があった。
【0005】
本発明は上記点に鑑みて、複数台のコンベアを備え、被搬送物が上流側のコンベアから下流側のコンベアへ搬送される搬送装置において、復路用のコンベアを廃止可能にすることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、メインコンベア(1、2)を複数台備え、搬送用無端ベルト(12、22)のうち上側に位置する上側ベルト部(120、220)に被搬送物(P)が載せられて、被搬送物(P)が上流側のメインコンベア(1)から下流側のメインコンベア(2)へ搬送される搬送装置において、下流側のメインコンベア(2)の搬送用無端ベルト(22)のうち下側に位置する下側ベルト部(221)に載せられて搬送されてきた被搬送物(P)を、上流側のメインコンベア(1)の搬送用無端ベルト(22)のうち下側に位置する下側ベルト部(121)にプーリー(10、21)を迂回して搬送するサブコンベア(5)を備えることを特徴とする。
【0007】
このように、下側ベルト部(121、221)にて被搬送物(P)を搬送する際に障害となるプーリー(10、21)をサブコンベア(5)にて迂回させることにより、メインコンベア(1、2)の下側ベルト部(121、221)を復路用として利用することが可能となり、復路用のコンベアを廃止することができる。従って、低コスト化および省エネルギー化を図ることができる。
【0008】
この場合、サブコンベア(5)は、下流側のメインコンベア(2)の下側ベルト部(221)に載せられて搬送されてきた被搬送物(P)を、サブコンベア(5)に案内した後に上流側のメインコンベア(1)の下側ベルト部(121)に案内するガイド(53)を備えることができる。
【0009】
このようにすれば、シリンダや電動アクチュエーター等で被搬送物(P)の出し入れをしてプーリー(10、21)を迂回させる場合よりも、簡単な構成で被搬送物(P)のスムーズな自動搬送が可能となる。
【0010】
また、メインコンベア(2)に伝達された駆動力をサブコンベア(5)に伝達する駆動力伝達手段(6)を備えることができる。
【0011】
このようにすれば、サブコンベア(5)用の駆動手段が不要であるため、一層の低コスト化および省エネルギー化を図ることができる。
【0012】
また、搬送用無端ベルト(22)および駆動力伝達手段(6)の伝達用無端ベルト(62)をともにタイミングベルトとし、搬送用無端ベルト(22)の歯と伝達用無端ベルト(62)の歯の噛み合いにより駆動力を伝達することができる。このようにすれば、駆動力を確実に伝達することができる。
【0013】
また、搬送用無端ベルト(22)と駆動力伝達手段(6)の伝達用無端ベルト(62)との摩擦力により駆動力を伝達することができ、その際、搬送用無端ベルト(22)と伝達用無端ベルト(62)とを、スプリング(73)に付勢されたプレート(70)にて密着させることができる。
【0014】
このようにすれば、スプリング力の調整により、伝達駆動力を調整することができる。
【0015】
また、搬送用無端ベルト(22)と駆動力伝達手段(6)の伝達用無端ベルト(62)との摩擦力により駆動力を伝達することができ、その際、搬送用無端ベルト(22)と伝達用無端ベルト(62)とを、テンションプーリー(81)にて密着させることができる。
【0016】
このようにすれば、テンションプーリー(81)の押し付け力の調整により、伝達駆動力を調整することができる。
【0017】
なお、特許請求の範囲およびこの欄で記載した各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明を実施するための最良の形態】
【0018】
(第1実施形態)
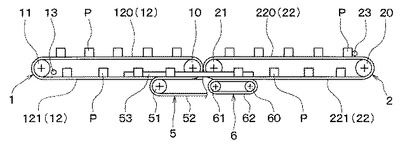
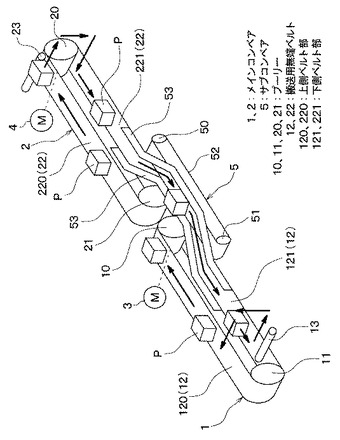
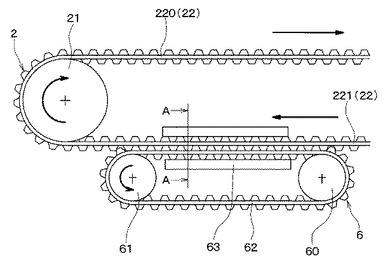
本発明の第1実施形態について説明する。図1は第1実施形態に係る搬送装置の正面図であり、駆動力伝達機構を明瞭に図示するためにサブコンベアの一部を切り欠いて示している。図2は図1の搬送装置の斜視図、図3は駆動力伝達機構およびサブコンベアの斜視図、図4は駆動力伝達機構付近の詳細を示す正面図、図5は図4のA−A線に沿う断面図である。
【0019】
図1〜図3に示すように、搬送装置は、被搬送物としてのパレットPを搬送するための2台のメインコンベア1、2、およびこの2台のメインコンベア1、2を駆動する駆動手段としての電動機3、4を備えている。
【0020】
第1メインコンベア1は、第1駆動プーリー10と第1従動プーリー11が離間して配置され、第1駆動プーリー10と第1従動プーリー11に第1搬送用無端ベルト12が巻かれている。第1駆動プーリー10および第1従動プーリー11の各回転軸は水平になっており、第1搬送用無端ベルト12の水平な部位は上下に位置している。以下、第1搬送用無端ベルト12の水平な部位のうち、上側に位置する部位を第1上側ベルト部120といい、下側に位置する部位を第1下側ベルト部121という。第1駆動プーリー10には第1電動機3が連結されており、この第1電動機3により第1駆動プーリー10が駆動され、ひいては第1搬送用無端ベルト12が駆動されるようになっている。
【0021】
第2メインコンベア2は、第1メインコンベア1と同様の構成であり、第2駆動プーリー20、第2従動プーリー21、および第2搬送用無端ベルト22を備えている。なお、第2搬送用無端ベルト22の水平な部位のうち、上側に位置する部位を第2上側ベルト部220といい、下側に位置する部位を第2下側ベルト部221という。第2駆動プーリー20には第2電動機4が連結されており、この第2電動機4により第2駆動プーリー20が駆動され、ひいては第2搬送用無端ベルト22が駆動されるようになっている。
【0022】
そして、2台のメインコンベア1、2は直列に配置されており、図示しないワークを載せたパレットPを、第1上側ベルト部120と第2上側ベルト部220とを利用して、第1メインコンベア1から第2メインコンベア2側へ搬送し、一方、空のパレットPを、第1下側ベルト部121と第2下側ベルト部221とを利用して、第2メインコンベア2から第1メインコンベア1側へ戻すようになっている。
【0023】
因みに、ワークを載せたパレットPの搬送を往路とした場合、第1上側ベルト部120における第2メインコンベア2と反対側の端部(第1従動プーリー11側)が往路始点であり、第2上側ベルト部220における第1メインコンベア1と反対側の端部(第2駆動プーリー20側)が往路終点である。この往路終点には、パレットPの移動を阻止する往路ストッパー23が配置されている。
【0024】
また、空のパレットPの搬送を復路とした場合、第2下側ベルト部221における第1メインコンベア1と反対側の端部(第2駆動プーリー20側)が復路始点であり、第1下側ベルト部121における第2メインコンベア2と反対側の端部(第1従動プーリー11側)が復路終点である。この復路終点には、パレットPの移動を阻止する復路ストッパー13が配置されている。
【0025】
搬送装置は、第2下側ベルト部221部に載せられて搬送されてきた空のパレットPを、第1駆動プーリー10および第2従動プーリー21を迂回して第1下側ベルト部121に搬送するサブコンベア5を備えている。サブコンベア5は、第1駆動プーリー10および第2従動プーリー21の側方に配置されている。
【0026】
サブコンベア5は、2つのプーリー50、51が離間して配置され、それらのプーリー50、51の各回転軸は水平になっており、それらのプーリー50、51にバイパス用無端ベルト52が巻かれている。一方のプーリー50は、駆動力伝達手段としての駆動力伝達機構6(詳細後述)を介して駆動力が伝達されるようになっている。これにより、一方のプーリー50が駆動され、ひいてはバイパス用無端ベルト52が駆動される。
【0027】
サブコンベア5は、空のパレットPの移動経路を規制する板状の2枚のガイド53を備えている。これらのガイド53は、平行に配置され、長手方向中間部がバイパス用無端ベルト52上に位置し、一端が第2下側ベルト部221上まで延びており、他端が第1下側ベルト部121上まで延びている。そして、これらのガイド53により、第2下側ベルト部221に載せられて搬送されてきたパレットPがバイパス用無端ベルト52上に案内され、さらに、バイパス用無端ベルト52にて第1駆動プーリー10および第2従動プーリー21を迂回して搬送されてきたパレットPが、第1下側ベルト部121上に案内されるようになっている。
【0028】
駆動力伝達機構6について、主に図4、図5に基づいて説明する。駆動力伝達機構6は、第2従動プーリー21の近傍で且つ第2下側ベルト部221の下方に配置されている。
【0029】
駆動力伝達機構6は、2つのプーリー60、61が離間して配置され、それらのプーリー60、61の各回転軸は水平になっており、それらのプーリー60、61に伝達用無端ベルト62が巻かれている。一方のプーリー60は、サブコンベア5の一方のプーリー50と連結されている。具体的には、両プーリー50、60の回転軸が共通になっている。
【0030】
伝達用無端ベルト62は、タイミングベルトを用いている。また、第1搬送用無端ベルト12および第2搬送用無端ベルト22のうち、少なくとも第2搬送用無端ベルト22はタイミングベルトを用いている。そして、第2搬送用無端ベルト22の歯と伝達用無端ベルト62の歯の噛み合いにより、第2電動機4の駆動力が第2搬送用無端ベルト22から伝達用無端ベルト62に伝達される。第2搬送用無端ベルト22と伝達用無端ベルト62は、歯の噛み合いを確実にするために、断面コの字状のベルト保持部材63にて挟持されている。
【0031】
前述したように、駆動力伝達機構6の一方のプーリー60はサブコンベア5の一方のプーリー50と連結されているため、第2電動機4の駆動力は、伝達用無端ベルト62から、駆動力伝達機構6一方のプーリー60、およびサブコンベア5の一方のプーリー50を介して、バイパス用無端ベルト52に伝達される。
【0032】
上記構成になる本実施形態の搬送装置の作動について説明する。
【0033】
両電動機3、4に通電すると、第1電動機3により第1駆動プーリー10を介して第1搬送用無端ベルト12が駆動され、第2電動機4により第2駆動プーリー20を介して第2搬送用無端ベルト22が駆動される。また、第2電動機4の駆動力が、駆動力伝達機構6を介してサブコンベア5に伝達され、バイパス用無端ベルト52が駆動される。
【0034】
そして、第1上側ベルト部120における往路始点にパレットPが移動されると、パレットPにワークが載せられる。ワークを載せたパレットPは、第1上側ベルト部120と第2上側ベルト部220とによって、往路始点から往路終点に向かって搬送され、この搬送中にワークはパレットPから取り出される。
【0035】
空になったパレットPは往路終点の往路ストッパー23により停止される。この停止されたパレットPは、図示しないローダー(エアシリンダ・電動アクチュエーター等)やロボット等にてチャックされ、横スライド⇒下降⇒横スライド動作により、第2下側ベルト部221上に移動される。
【0036】
第2下側ベルト部221にて搬送されたパレットPは、ガイド53によりバイパス用無端ベルト52上に案内され、さらに、バイパス用無端ベルト52にて第1駆動プーリー10および第2従動プーリー21を迂回して搬送されたパレットPは、ガイド53により第1下側ベルト部121上に案内される。
【0037】
そのパレットPは、第1下側ベルト部121にて復路終点まで搬送され、復路終点の復路ストッパー13により停止される。この停止されたパレットPは、図示しないローダー(エアシリンダ・電動アクチュエーター等)やロボット等にてチャックされ、横スライド⇒上昇⇒横スライド動作により、再び第1上側ベルト部120上に移動させられる。
【0038】
本実施形態の搬送装置は、第1下側ベルト部121および第2下側ベルト部221にてパレットPを搬送する際に障害となる第1駆動プーリー10および第2従動プーリー21をサブコンベア5にて迂回させるため、メインコンベア1、2の第1下側ベルト部121および第2下側ベルト部221を復路用として利用することが可能となり、復路用のコンベアを廃止することができる。従って、低コスト化および省エネルギー化を図ることができる。
【0039】
また、第1駆動プーリー10および第2従動プーリー21をサブコンベア5にて迂回させるため、シリンダや電動アクチュエーター等でパレットPの出し入れをして第1駆動プーリー10および第2従動プーリー21を迂回させる場合よりも、簡単な構成でパレットPのスムーズな自動搬送が可能となる。
【0040】
また、第2メインコンベア2の第2電動機4の駆動力が、駆動力伝達機構6を介してサブコンベア5に伝達されるため、サブコンベア用の駆動手段が不要であり、一層の低コスト化および省エネルギー化を図ることができる。
【0041】
また、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62は共にタイミングベルトを用いているため、駆動力を確実に伝達することができる。
【0042】
また、第2搬送用無端ベルト22と伝達用無端ベルト62は、ベルト保持部材63にて挟持されているため、両者の歯の噛み合いを確実にすることができる。
【0043】
(第2実施形態)
本発明の第2実施形態について説明する。図6は第2実施形態に係る搬送装置の駆動力伝達機構付近を示す正面図である。第1実施形態と同一もしくは均等部分には同一の符号を付し、その説明を省略する。
【0044】
第1実施形態では、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62を共にタイミングベルトとし、第2搬送用無端ベルト22の歯と伝達用無端ベルト62の歯の噛み合いにより、第2電動機4の駆動力を第2搬送用無端ベルト22から伝達用無端ベルト62に伝達するようにしたが、本実施形態では、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62を共に平ベルトとし、第2搬送用無端ベルト22と伝達用無端ベルト62の摩擦力により、第2電動機4の駆動力を第2搬送用無端ベルト22から伝達用無端ベルト62に伝達するようにしている。
【0045】
図6に示すように、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62は共に平ベルトを用いている。第2搬送用無端ベルト22と伝達用無端ベルト62は、ベルト押えプレート70とベルト受けプレート71により挟持されている。
【0046】
ベルト押えプレート70は、2本のピン72により摺動自在に保持されるとともに、スプリング73によりベルト受けプレート71側に向かって付勢されている。ピン72は固定プレート74に固定され、スプリング73はベルト押えプレート70と固定プレート74との間に配置されている。
【0047】
上記構成になる本実施形態の搬送装置では、第2搬送用無端ベルト22と伝達用無端ベルト62を、ベルト押えプレート70を介してスプリング73によりベルト受けプレート71に押え付けて、第2搬送用無端ベルト22と伝達用無端ベルト62間で大きな摩擦力を得ている。
【0048】
従って、第2電動機4の駆動力は、第2搬送用無端ベルト22から伝達用無端ベルト62に確実に伝達され、さらに、その駆動力は第1実施形態と同様にしてサブコンベア5(図1参照)に伝達される。
【0049】
なお、スプリング73の付勢力の調整により、第2搬送用無端ベルト22と伝達用無端ベルト62間の摩擦力の調整、ひいては伝達駆動力を調整することができる。
【0050】
(第3実施形態)
本発明の第3実施形態について説明する。図7は第3実施形態に係る搬送装置の駆動力伝達機構付近を示す正面図である。第1実施形態と同一もしくは均等部分には同一の符号を付し、その説明を省略する。
【0051】
本実施形態は、第2実施形態と同様に、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62を共に平ベルトとし、第2搬送用無端ベルト22と伝達用無端ベルト62の摩擦力により、第2電動機4の駆動力を第2搬送用無端ベルト22から伝達用無端ベルト62に伝達するようにしている。
【0052】
図7に示すように、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62は共に平ベルトを用いている。第2搬送用無端ベルト22と伝達用無端ベルト62は、伝達用無端ベルト62に接するサブコンベア駆動プーリー80と、第2搬送用無端ベルト22に接する2つのテンションプーリー81により挟持されている。
【0053】
上記構成になる本実施形態の搬送装置では、第2搬送用無端ベルト22と伝達用無端ベルト62は、テンションプーリー81により矢印Bの向きの押し付け力を受けて密着しており、第2搬送用無端ベルト22と伝達用無端ベルト62間で大きな摩擦力が発生する。
【0054】
従って、第2電動機4の駆動力は、第2搬送用無端ベルト22から伝達用無端ベルト62に確実に伝達され、さらに、その駆動力は第1実施形態と同様にしてサブコンベア5(図1参照)に伝達される。
【0055】
なお、テンションプーリー81による押し付け力の調整により、第2搬送用無端ベルト22と伝達用無端ベルト62間の摩擦力の調整、ひいては伝達駆動力を調整することができる。
【0056】
(他の実施形態)
上記各実施形態では、2台のメインコンベア1、2を用いる例を示したが、本発明は、3台以上のメインコンベアを用いる搬送装置にも適用することができる。
【図面の簡単な説明】
【0057】
【図1】本発明の第1実施形態に係る搬送装置の正面図である。
【図2】図1の搬送装置の斜視図である。
【図3】図1の駆動力伝達機構およびサブコンベアの斜視図である。
【図4】図1の駆動力伝達機構付近の詳細を示す正面図である。
【図5】図4のA−A線に沿う断面図である。
【図6】本発明の第2実施形態に係る搬送装置の駆動力伝達機構付近を示す正面図である。
【図7】本発明の第3実施形態に係る搬送装置の駆動力伝達機構付近を示す正面図である。
【符号の説明】
【0058】
1、2…メインコンベア、5…サブコンベア、10、11、20、21…プーリー、12、22…搬送用無端ベルト、120、220…上側ベルト部、121、221…下側ベルト部。
【技術分野】
【0001】
本発明は、複数台のコンベアを備え、被搬送物が上流側のコンベアから下流側のコンベアへ搬送される搬送装置に関するものである。
【背景技術】
【0002】
パレットを使用する従来の搬送装置は、ワークを載せたパレットを搬送するための往路用のコンベアと、空パレットを戻すための復路用のコンベアを用いている。また、長いラインの場合は、往路用、復路用共に、複数台のコンベアを繋いで対応している。さらに、構造の複雑化を避けるために、各コンベアにそれぞれ駆動モーターを設けている。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来の搬送装置は往路用のコンベアと復路用のコンベアを用いているため、水平循環タイプ及び上下循環タイプ共スペースを多く取ってしまうという問題があった。
【0004】
また、各コンベアにそれぞれ駆動モーターを設けているため、コストも高く省エネルギーにも貢献出来ないという問題があった。
【0005】
本発明は上記点に鑑みて、複数台のコンベアを備え、被搬送物が上流側のコンベアから下流側のコンベアへ搬送される搬送装置において、復路用のコンベアを廃止可能にすることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、メインコンベア(1、2)を複数台備え、搬送用無端ベルト(12、22)のうち上側に位置する上側ベルト部(120、220)に被搬送物(P)が載せられて、被搬送物(P)が上流側のメインコンベア(1)から下流側のメインコンベア(2)へ搬送される搬送装置において、下流側のメインコンベア(2)の搬送用無端ベルト(22)のうち下側に位置する下側ベルト部(221)に載せられて搬送されてきた被搬送物(P)を、上流側のメインコンベア(1)の搬送用無端ベルト(22)のうち下側に位置する下側ベルト部(121)にプーリー(10、21)を迂回して搬送するサブコンベア(5)を備えることを特徴とする。
【0007】
このように、下側ベルト部(121、221)にて被搬送物(P)を搬送する際に障害となるプーリー(10、21)をサブコンベア(5)にて迂回させることにより、メインコンベア(1、2)の下側ベルト部(121、221)を復路用として利用することが可能となり、復路用のコンベアを廃止することができる。従って、低コスト化および省エネルギー化を図ることができる。
【0008】
この場合、サブコンベア(5)は、下流側のメインコンベア(2)の下側ベルト部(221)に載せられて搬送されてきた被搬送物(P)を、サブコンベア(5)に案内した後に上流側のメインコンベア(1)の下側ベルト部(121)に案内するガイド(53)を備えることができる。
【0009】
このようにすれば、シリンダや電動アクチュエーター等で被搬送物(P)の出し入れをしてプーリー(10、21)を迂回させる場合よりも、簡単な構成で被搬送物(P)のスムーズな自動搬送が可能となる。
【0010】
また、メインコンベア(2)に伝達された駆動力をサブコンベア(5)に伝達する駆動力伝達手段(6)を備えることができる。
【0011】
このようにすれば、サブコンベア(5)用の駆動手段が不要であるため、一層の低コスト化および省エネルギー化を図ることができる。
【0012】
また、搬送用無端ベルト(22)および駆動力伝達手段(6)の伝達用無端ベルト(62)をともにタイミングベルトとし、搬送用無端ベルト(22)の歯と伝達用無端ベルト(62)の歯の噛み合いにより駆動力を伝達することができる。このようにすれば、駆動力を確実に伝達することができる。
【0013】
また、搬送用無端ベルト(22)と駆動力伝達手段(6)の伝達用無端ベルト(62)との摩擦力により駆動力を伝達することができ、その際、搬送用無端ベルト(22)と伝達用無端ベルト(62)とを、スプリング(73)に付勢されたプレート(70)にて密着させることができる。
【0014】
このようにすれば、スプリング力の調整により、伝達駆動力を調整することができる。
【0015】
また、搬送用無端ベルト(22)と駆動力伝達手段(6)の伝達用無端ベルト(62)との摩擦力により駆動力を伝達することができ、その際、搬送用無端ベルト(22)と伝達用無端ベルト(62)とを、テンションプーリー(81)にて密着させることができる。
【0016】
このようにすれば、テンションプーリー(81)の押し付け力の調整により、伝達駆動力を調整することができる。
【0017】
なお、特許請求の範囲およびこの欄で記載した各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明を実施するための最良の形態】
【0018】
(第1実施形態)
本発明の第1実施形態について説明する。図1は第1実施形態に係る搬送装置の正面図であり、駆動力伝達機構を明瞭に図示するためにサブコンベアの一部を切り欠いて示している。図2は図1の搬送装置の斜視図、図3は駆動力伝達機構およびサブコンベアの斜視図、図4は駆動力伝達機構付近の詳細を示す正面図、図5は図4のA−A線に沿う断面図である。
【0019】
図1〜図3に示すように、搬送装置は、被搬送物としてのパレットPを搬送するための2台のメインコンベア1、2、およびこの2台のメインコンベア1、2を駆動する駆動手段としての電動機3、4を備えている。
【0020】
第1メインコンベア1は、第1駆動プーリー10と第1従動プーリー11が離間して配置され、第1駆動プーリー10と第1従動プーリー11に第1搬送用無端ベルト12が巻かれている。第1駆動プーリー10および第1従動プーリー11の各回転軸は水平になっており、第1搬送用無端ベルト12の水平な部位は上下に位置している。以下、第1搬送用無端ベルト12の水平な部位のうち、上側に位置する部位を第1上側ベルト部120といい、下側に位置する部位を第1下側ベルト部121という。第1駆動プーリー10には第1電動機3が連結されており、この第1電動機3により第1駆動プーリー10が駆動され、ひいては第1搬送用無端ベルト12が駆動されるようになっている。
【0021】
第2メインコンベア2は、第1メインコンベア1と同様の構成であり、第2駆動プーリー20、第2従動プーリー21、および第2搬送用無端ベルト22を備えている。なお、第2搬送用無端ベルト22の水平な部位のうち、上側に位置する部位を第2上側ベルト部220といい、下側に位置する部位を第2下側ベルト部221という。第2駆動プーリー20には第2電動機4が連結されており、この第2電動機4により第2駆動プーリー20が駆動され、ひいては第2搬送用無端ベルト22が駆動されるようになっている。
【0022】
そして、2台のメインコンベア1、2は直列に配置されており、図示しないワークを載せたパレットPを、第1上側ベルト部120と第2上側ベルト部220とを利用して、第1メインコンベア1から第2メインコンベア2側へ搬送し、一方、空のパレットPを、第1下側ベルト部121と第2下側ベルト部221とを利用して、第2メインコンベア2から第1メインコンベア1側へ戻すようになっている。
【0023】
因みに、ワークを載せたパレットPの搬送を往路とした場合、第1上側ベルト部120における第2メインコンベア2と反対側の端部(第1従動プーリー11側)が往路始点であり、第2上側ベルト部220における第1メインコンベア1と反対側の端部(第2駆動プーリー20側)が往路終点である。この往路終点には、パレットPの移動を阻止する往路ストッパー23が配置されている。
【0024】
また、空のパレットPの搬送を復路とした場合、第2下側ベルト部221における第1メインコンベア1と反対側の端部(第2駆動プーリー20側)が復路始点であり、第1下側ベルト部121における第2メインコンベア2と反対側の端部(第1従動プーリー11側)が復路終点である。この復路終点には、パレットPの移動を阻止する復路ストッパー13が配置されている。
【0025】
搬送装置は、第2下側ベルト部221部に載せられて搬送されてきた空のパレットPを、第1駆動プーリー10および第2従動プーリー21を迂回して第1下側ベルト部121に搬送するサブコンベア5を備えている。サブコンベア5は、第1駆動プーリー10および第2従動プーリー21の側方に配置されている。
【0026】
サブコンベア5は、2つのプーリー50、51が離間して配置され、それらのプーリー50、51の各回転軸は水平になっており、それらのプーリー50、51にバイパス用無端ベルト52が巻かれている。一方のプーリー50は、駆動力伝達手段としての駆動力伝達機構6(詳細後述)を介して駆動力が伝達されるようになっている。これにより、一方のプーリー50が駆動され、ひいてはバイパス用無端ベルト52が駆動される。
【0027】
サブコンベア5は、空のパレットPの移動経路を規制する板状の2枚のガイド53を備えている。これらのガイド53は、平行に配置され、長手方向中間部がバイパス用無端ベルト52上に位置し、一端が第2下側ベルト部221上まで延びており、他端が第1下側ベルト部121上まで延びている。そして、これらのガイド53により、第2下側ベルト部221に載せられて搬送されてきたパレットPがバイパス用無端ベルト52上に案内され、さらに、バイパス用無端ベルト52にて第1駆動プーリー10および第2従動プーリー21を迂回して搬送されてきたパレットPが、第1下側ベルト部121上に案内されるようになっている。
【0028】
駆動力伝達機構6について、主に図4、図5に基づいて説明する。駆動力伝達機構6は、第2従動プーリー21の近傍で且つ第2下側ベルト部221の下方に配置されている。
【0029】
駆動力伝達機構6は、2つのプーリー60、61が離間して配置され、それらのプーリー60、61の各回転軸は水平になっており、それらのプーリー60、61に伝達用無端ベルト62が巻かれている。一方のプーリー60は、サブコンベア5の一方のプーリー50と連結されている。具体的には、両プーリー50、60の回転軸が共通になっている。
【0030】
伝達用無端ベルト62は、タイミングベルトを用いている。また、第1搬送用無端ベルト12および第2搬送用無端ベルト22のうち、少なくとも第2搬送用無端ベルト22はタイミングベルトを用いている。そして、第2搬送用無端ベルト22の歯と伝達用無端ベルト62の歯の噛み合いにより、第2電動機4の駆動力が第2搬送用無端ベルト22から伝達用無端ベルト62に伝達される。第2搬送用無端ベルト22と伝達用無端ベルト62は、歯の噛み合いを確実にするために、断面コの字状のベルト保持部材63にて挟持されている。
【0031】
前述したように、駆動力伝達機構6の一方のプーリー60はサブコンベア5の一方のプーリー50と連結されているため、第2電動機4の駆動力は、伝達用無端ベルト62から、駆動力伝達機構6一方のプーリー60、およびサブコンベア5の一方のプーリー50を介して、バイパス用無端ベルト52に伝達される。
【0032】
上記構成になる本実施形態の搬送装置の作動について説明する。
【0033】
両電動機3、4に通電すると、第1電動機3により第1駆動プーリー10を介して第1搬送用無端ベルト12が駆動され、第2電動機4により第2駆動プーリー20を介して第2搬送用無端ベルト22が駆動される。また、第2電動機4の駆動力が、駆動力伝達機構6を介してサブコンベア5に伝達され、バイパス用無端ベルト52が駆動される。
【0034】
そして、第1上側ベルト部120における往路始点にパレットPが移動されると、パレットPにワークが載せられる。ワークを載せたパレットPは、第1上側ベルト部120と第2上側ベルト部220とによって、往路始点から往路終点に向かって搬送され、この搬送中にワークはパレットPから取り出される。
【0035】
空になったパレットPは往路終点の往路ストッパー23により停止される。この停止されたパレットPは、図示しないローダー(エアシリンダ・電動アクチュエーター等)やロボット等にてチャックされ、横スライド⇒下降⇒横スライド動作により、第2下側ベルト部221上に移動される。
【0036】
第2下側ベルト部221にて搬送されたパレットPは、ガイド53によりバイパス用無端ベルト52上に案内され、さらに、バイパス用無端ベルト52にて第1駆動プーリー10および第2従動プーリー21を迂回して搬送されたパレットPは、ガイド53により第1下側ベルト部121上に案内される。
【0037】
そのパレットPは、第1下側ベルト部121にて復路終点まで搬送され、復路終点の復路ストッパー13により停止される。この停止されたパレットPは、図示しないローダー(エアシリンダ・電動アクチュエーター等)やロボット等にてチャックされ、横スライド⇒上昇⇒横スライド動作により、再び第1上側ベルト部120上に移動させられる。
【0038】
本実施形態の搬送装置は、第1下側ベルト部121および第2下側ベルト部221にてパレットPを搬送する際に障害となる第1駆動プーリー10および第2従動プーリー21をサブコンベア5にて迂回させるため、メインコンベア1、2の第1下側ベルト部121および第2下側ベルト部221を復路用として利用することが可能となり、復路用のコンベアを廃止することができる。従って、低コスト化および省エネルギー化を図ることができる。
【0039】
また、第1駆動プーリー10および第2従動プーリー21をサブコンベア5にて迂回させるため、シリンダや電動アクチュエーター等でパレットPの出し入れをして第1駆動プーリー10および第2従動プーリー21を迂回させる場合よりも、簡単な構成でパレットPのスムーズな自動搬送が可能となる。
【0040】
また、第2メインコンベア2の第2電動機4の駆動力が、駆動力伝達機構6を介してサブコンベア5に伝達されるため、サブコンベア用の駆動手段が不要であり、一層の低コスト化および省エネルギー化を図ることができる。
【0041】
また、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62は共にタイミングベルトを用いているため、駆動力を確実に伝達することができる。
【0042】
また、第2搬送用無端ベルト22と伝達用無端ベルト62は、ベルト保持部材63にて挟持されているため、両者の歯の噛み合いを確実にすることができる。
【0043】
(第2実施形態)
本発明の第2実施形態について説明する。図6は第2実施形態に係る搬送装置の駆動力伝達機構付近を示す正面図である。第1実施形態と同一もしくは均等部分には同一の符号を付し、その説明を省略する。
【0044】
第1実施形態では、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62を共にタイミングベルトとし、第2搬送用無端ベルト22の歯と伝達用無端ベルト62の歯の噛み合いにより、第2電動機4の駆動力を第2搬送用無端ベルト22から伝達用無端ベルト62に伝達するようにしたが、本実施形態では、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62を共に平ベルトとし、第2搬送用無端ベルト22と伝達用無端ベルト62の摩擦力により、第2電動機4の駆動力を第2搬送用無端ベルト22から伝達用無端ベルト62に伝達するようにしている。
【0045】
図6に示すように、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62は共に平ベルトを用いている。第2搬送用無端ベルト22と伝達用無端ベルト62は、ベルト押えプレート70とベルト受けプレート71により挟持されている。
【0046】
ベルト押えプレート70は、2本のピン72により摺動自在に保持されるとともに、スプリング73によりベルト受けプレート71側に向かって付勢されている。ピン72は固定プレート74に固定され、スプリング73はベルト押えプレート70と固定プレート74との間に配置されている。
【0047】
上記構成になる本実施形態の搬送装置では、第2搬送用無端ベルト22と伝達用無端ベルト62を、ベルト押えプレート70を介してスプリング73によりベルト受けプレート71に押え付けて、第2搬送用無端ベルト22と伝達用無端ベルト62間で大きな摩擦力を得ている。
【0048】
従って、第2電動機4の駆動力は、第2搬送用無端ベルト22から伝達用無端ベルト62に確実に伝達され、さらに、その駆動力は第1実施形態と同様にしてサブコンベア5(図1参照)に伝達される。
【0049】
なお、スプリング73の付勢力の調整により、第2搬送用無端ベルト22と伝達用無端ベルト62間の摩擦力の調整、ひいては伝達駆動力を調整することができる。
【0050】
(第3実施形態)
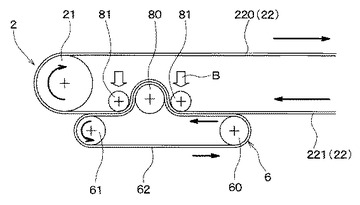
本発明の第3実施形態について説明する。図7は第3実施形態に係る搬送装置の駆動力伝達機構付近を示す正面図である。第1実施形態と同一もしくは均等部分には同一の符号を付し、その説明を省略する。
【0051】
本実施形態は、第2実施形態と同様に、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62を共に平ベルトとし、第2搬送用無端ベルト22と伝達用無端ベルト62の摩擦力により、第2電動機4の駆動力を第2搬送用無端ベルト22から伝達用無端ベルト62に伝達するようにしている。
【0052】
図7に示すように、第2メインコンベア2の第2搬送用無端ベルト22および駆動力伝達機構6の伝達用無端ベルト62は共に平ベルトを用いている。第2搬送用無端ベルト22と伝達用無端ベルト62は、伝達用無端ベルト62に接するサブコンベア駆動プーリー80と、第2搬送用無端ベルト22に接する2つのテンションプーリー81により挟持されている。
【0053】
上記構成になる本実施形態の搬送装置では、第2搬送用無端ベルト22と伝達用無端ベルト62は、テンションプーリー81により矢印Bの向きの押し付け力を受けて密着しており、第2搬送用無端ベルト22と伝達用無端ベルト62間で大きな摩擦力が発生する。
【0054】
従って、第2電動機4の駆動力は、第2搬送用無端ベルト22から伝達用無端ベルト62に確実に伝達され、さらに、その駆動力は第1実施形態と同様にしてサブコンベア5(図1参照)に伝達される。
【0055】
なお、テンションプーリー81による押し付け力の調整により、第2搬送用無端ベルト22と伝達用無端ベルト62間の摩擦力の調整、ひいては伝達駆動力を調整することができる。
【0056】
(他の実施形態)
上記各実施形態では、2台のメインコンベア1、2を用いる例を示したが、本発明は、3台以上のメインコンベアを用いる搬送装置にも適用することができる。
【図面の簡単な説明】
【0057】
【図1】本発明の第1実施形態に係る搬送装置の正面図である。
【図2】図1の搬送装置の斜視図である。
【図3】図1の駆動力伝達機構およびサブコンベアの斜視図である。
【図4】図1の駆動力伝達機構付近の詳細を示す正面図である。
【図5】図4のA−A線に沿う断面図である。
【図6】本発明の第2実施形態に係る搬送装置の駆動力伝達機構付近を示す正面図である。
【図7】本発明の第3実施形態に係る搬送装置の駆動力伝達機構付近を示す正面図である。
【符号の説明】
【0058】
1、2…メインコンベア、5…サブコンベア、10、11、20、21…プーリー、12、22…搬送用無端ベルト、120、220…上側ベルト部、121、221…下側ベルト部。
【特許請求の範囲】
【請求項1】
離間して配置された2つのプーリー(10、11、20、21)に搬送用無端ベルト(12、22)が巻かれたメインコンベア(1、2)を複数台備え、前記搬送用無端ベルト(12、22)のうち上側に位置する上側ベルト部(120、220)に被搬送物(P)が載せられて、前記被搬送物(P)が上流側のメインコンベア(1)から下流側のメインコンベア(2)へ搬送される搬送装置において、
前記下流側のメインコンベア(2)の搬送用無端ベルト(22)のうち下側に位置する下側ベルト部(221)に載せられて搬送されてきた前記被搬送物(P)を、前記上流側のメインコンベア(1)の搬送用無端ベルト(22)のうち下側に位置する下側ベルト部(121)に前記プーリー(10、21)を迂回して搬送するサブコンベア(5)を備えることを特徴とする搬送装置。
【請求項2】
前記サブコンベア(5)は、前記下流側のメインコンベア(2)の下側ベルト部(221)に載せられて搬送されてきた前記被搬送物(P)を、前記サブコンベア(5)に案内した後に前記上流側のメインコンベア(1)の下側ベルト部(121)に案内するガイド(53)を備えることを特徴とする1に記載の搬送装置。
【請求項3】
前記メインコンベア(2)を駆動する駆動手段(4)と、
前記駆動手段(4)から前記メインコンベア(2)に伝達された駆動力を前記サブコンベア(5)に伝達する駆動力伝達手段(6)を備えることを特徴とする請求項1または2に記載の搬送装置。
【請求項4】
前記駆動力伝達手段(6)は、両端に配設したプーリー(60、61)に巻かれた伝達用無端ベルト(62)を備え、
前記搬送用無端ベルト(22)および前記伝達用無端ベルト(62)はともにタイミングベルトであり、前記搬送用無端ベルト(22)の歯と前記伝達用無端ベルト(62)の歯の噛み合いにより駆動力が伝達されることを特徴とする請求項3に記載の搬送装置。
【請求項5】
前記駆動力伝達手段(6)は、両端に配設したプーリー(60、61)に巻かれた伝達用無端ベルト(62)を備え、
前記搬送用無端ベルト(22)と前記伝達用無端ベルト(62)との摩擦力により駆動力が伝達されることを特徴とする請求項3に記載の搬送装置。
【請求項6】
前記搬送用無端ベルト(22)と前記伝達用無端ベルト(62)とを、スプリング(73)に付勢されたプレート(70)にて密着させることを特徴とする請求項5に記載の搬送装置。
【請求項7】
前記搬送用無端ベルト(22)と前記伝達用無端ベルト(62)とを、テンションプーリー(81)にて密着させることを特徴とする請求項5に記載の搬送装置。
【請求項1】
離間して配置された2つのプーリー(10、11、20、21)に搬送用無端ベルト(12、22)が巻かれたメインコンベア(1、2)を複数台備え、前記搬送用無端ベルト(12、22)のうち上側に位置する上側ベルト部(120、220)に被搬送物(P)が載せられて、前記被搬送物(P)が上流側のメインコンベア(1)から下流側のメインコンベア(2)へ搬送される搬送装置において、
前記下流側のメインコンベア(2)の搬送用無端ベルト(22)のうち下側に位置する下側ベルト部(221)に載せられて搬送されてきた前記被搬送物(P)を、前記上流側のメインコンベア(1)の搬送用無端ベルト(22)のうち下側に位置する下側ベルト部(121)に前記プーリー(10、21)を迂回して搬送するサブコンベア(5)を備えることを特徴とする搬送装置。
【請求項2】
前記サブコンベア(5)は、前記下流側のメインコンベア(2)の下側ベルト部(221)に載せられて搬送されてきた前記被搬送物(P)を、前記サブコンベア(5)に案内した後に前記上流側のメインコンベア(1)の下側ベルト部(121)に案内するガイド(53)を備えることを特徴とする1に記載の搬送装置。
【請求項3】
前記メインコンベア(2)を駆動する駆動手段(4)と、
前記駆動手段(4)から前記メインコンベア(2)に伝達された駆動力を前記サブコンベア(5)に伝達する駆動力伝達手段(6)を備えることを特徴とする請求項1または2に記載の搬送装置。
【請求項4】
前記駆動力伝達手段(6)は、両端に配設したプーリー(60、61)に巻かれた伝達用無端ベルト(62)を備え、
前記搬送用無端ベルト(22)および前記伝達用無端ベルト(62)はともにタイミングベルトであり、前記搬送用無端ベルト(22)の歯と前記伝達用無端ベルト(62)の歯の噛み合いにより駆動力が伝達されることを特徴とする請求項3に記載の搬送装置。
【請求項5】
前記駆動力伝達手段(6)は、両端に配設したプーリー(60、61)に巻かれた伝達用無端ベルト(62)を備え、
前記搬送用無端ベルト(22)と前記伝達用無端ベルト(62)との摩擦力により駆動力が伝達されることを特徴とする請求項3に記載の搬送装置。
【請求項6】
前記搬送用無端ベルト(22)と前記伝達用無端ベルト(62)とを、スプリング(73)に付勢されたプレート(70)にて密着させることを特徴とする請求項5に記載の搬送装置。
【請求項7】
前記搬送用無端ベルト(22)と前記伝達用無端ベルト(62)とを、テンションプーリー(81)にて密着させることを特徴とする請求項5に記載の搬送装置。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−110858(P2008−110858A)
【公開日】平成20年5月15日(2008.5.15)
【国際特許分類】
【出願番号】特願2006−296194(P2006−296194)
【出願日】平成18年10月31日(2006.10.31)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成20年5月15日(2008.5.15)
【国際特許分類】
【出願日】平成18年10月31日(2006.10.31)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]