
秤量装置、特に電磁力補償の原理で作動する秤量装置
【課題】秤量センサユニットと他のユニットとを、熱膨張の差によって応力が発生しないように接続する。
【解決手段】秤量センサユニット5と、少なくとも3つの固定領域13において接続されている被接続ユニット7とを備えた秤量装置、特に電磁力補償の原理で作動する秤量装置において、被接続ユニット7または秤量センサユニット5は、少なくとも2つの固定領域13においてそれぞれ1つの接続領域17を有し、該接続領域が継手構造19を介して被接続ユニット7または秤量センサユニット5と接続され、継手構造19は、基準点Rと接続領域17の中心Zとによって定義された方向への接続領域17の実質的に平行移動の変位運動を可能にし、かつ継手構造19による運動経路が、基準点Rと中心Zとを結ぶ直線に沿った、被接続ユニット7および秤量センサユニット5の所定の温度範囲での熱膨張の最大限可能な差と、同じ大きさであるように形成されている。
【解決手段】秤量センサユニット5と、少なくとも3つの固定領域13において接続されている被接続ユニット7とを備えた秤量装置、特に電磁力補償の原理で作動する秤量装置において、被接続ユニット7または秤量センサユニット5は、少なくとも2つの固定領域13においてそれぞれ1つの接続領域17を有し、該接続領域が継手構造19を介して被接続ユニット7または秤量センサユニット5と接続され、継手構造19は、基準点Rと接続領域17の中心Zとによって定義された方向への接続領域17の実質的に平行移動の変位運動を可能にし、かつ継手構造19による運動経路が、基準点Rと中心Zとを結ぶ直線に沿った、被接続ユニット7および秤量センサユニット5の所定の温度範囲での熱膨張の最大限可能な差と、同じ大きさであるように形成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1の前提部の特徴を有する秤量装置、特に電磁力補償の原理で作動する秤量装置に関する。
【背景技術】
【0002】
秤量技術では、異なった材料からなる構成要素を繋ぎ合わせることがしばしば必要になり、その場合、構成要素の1つは、例えば秤量セルなどであり、この秤量セルは機械的応力に敏感に反応する。こうした機械的応力は、両構成要素を接続しただけでも生じる可能性があるが、両構成要素を当初の温度では機械的応力がない状態で互いに接続した場合でも、その後の温度変化による熱膨張が両構成要素で異なることによって機械的応力が生じることもある。
【0003】
電流力補償の原理で作動する秤量セルでは、レバー機構は、しばしばアルミニウムのインゴットから作り出される。これに対してベースプレートは、他の、例えば特殊鋼などの材料からなることが多い。しかし、秤量セルのハウジング全体がアルミニウムからなることもあるし、秤量セルと接続され、例えばネジ締結される架台が鋼から製造されることもある。その場合、温度が変化すると、接触面が変形するか、相対して変位さえするという問題が生じる。外形の変化、または機械的応力の発生は、場合によっては計測値を検出するセンサにまで及び、計測誤差を生ぜしめる可能性がある。
【0004】
センサの精度を損なうこうした応力を防止するために、本来の秤量システムを、それ自体がベースプレートと接続された保持金具によってベースプレートに固定することが、特許文献1(DE102005033952B4)によって公知である。この特許文献1では、秤量システムが保持金具とカンチレバー式に接続され、例えばネジ締結が可能である。こうすることで、少なくともベースプレートのねじれが秤量システムに伝達されない。しかし、このように固定しても、秤量システムおよびクリップの材料の膨張係数が異なるために生じる熱応力は避けることができない。
【0005】
別の特許文献2(DE60206339T2)から、電磁力補償の原理で作動する秤量セルの基体のための固定構造が公知であり、この特許文献2では、基体は、本来の力計測システムから突出する側方フランジ要素を有し、このフランジは、固定ネジのための孔をもつ。このことにより、組み立てることによって引き起こされた応力が秤量セルの領域に伝達され、その応力で計測結果の精度が損なわれることが防止される。しかし、フランジ要素は、残りの基体と単一片に形成されているので、これを確実には防止できない。
【0006】
さらに別の類似のアプローチが特許文献3(DE19535202C1)に記載されている。この特許文献3では、基体に切り込みを入れることにより固定領域を切り離し、これらの領域に発生した応力またはねじれが本来のセンサ領域、すなわち計測値の検出の精度に影響を及ぼす基体の領域に伝達されることを防止する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】DE102005033952B4
【特許文献2】DE60206339T2
【特許文献3】DE19535202C1
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、こうした公知の解決策は、わずかな機械的応力に対しても敏感に反応する秤量装置の力計測センサまたはセンサ領域において、計測精度が損なわれることを、結局、ほとんど防止できていない。
【課題を解決するための手段】
【0009】
本発明は、上記の従来技術を出発点として、本来の秤量センサユニットの組立て時に温度が変動した場合、或いは組立て後に温度が変動した場合でも、秤量センサユニットの高感度領域に応力が伝達されて秤量装置の計測値検出の精度もしくは温度安定性、および長期安定性に不利な影響が及ぶのを防止する秤量装置を提供するという課題にもとづいている。
【0010】
本発明は上記課題を請求項1の特徴によって解決する。
本発明は、温度変化に基づく膨張が数学的近似写像に対応し、すなわち、ボディの縦横比と角度とはそのままであるという知見を出発点とする。すなわち、異なった材料からなる要素の熱膨張があった場合の固定点の相対する変位は任意ではなく、上述の法則性に支配されている。
【0011】
異なった材料の2つの構成要素が、少なくとも3つの固定領域において互いに接続される。構成要素が形状結合、力学的結合、または素材結合により、互いに堅固に接続される固定領域、すなわち両構成要素の領域は、構成要素の全寸法に対してわずかしか膨張しないので、固定領域の内部に形成される応力は、秤量センサユニットに対するその影響に関して無視することができる。固定領域が点状であることが理想的であるが、これは技術的に実現できるものではない。実際には、固定領域は、例えば、ねじ込み接続を実現するために必要な寸法を有する。
【0012】
秤量装置の秤量センサユニットは、接続されるべき2つの構成要素のうちの1つであり、その場合、秤量センサユニットは、少なくとも3つの固定領域において、例えば支持プレートまたは荷重プレートなどの別のユニットと接続される。秤量装置の「秤量センサユニット」という用語は、本明細書の範囲内で、荷重力が導入される本来のセンサ領域と、当該センサ領域と堅固に(単一ピースに、または着脱可能に)接続されるすべてのものを含む。例えば、秤量センサユニットは、いわゆる電磁力補償の原理で作動する計測セルのモノリシックブロックであり得るし、このようなモノリシックブロックが収容されるハウジングでもあり得る。本発明に係る「固定」は、特に秤量センサユニットもしくはモノリシックブロックそれ自体と底プレートまたは支持プレートとの間、あるいはモノリシックブロックを収容してこれと堅固に接続されたハウジングと底プレートまたは支持プレートとの間で行われるが、その場合、底プレートは、本明細書の用語上では別のユニットである。しかし、前記「固定」は、例えば荷重プレートなどの別のユニットと秤量センサユニットもしくはモノリシックブロックとの間で行うこともできる。
【0013】
少なくとも3つの固定領域の少なくとも2つにおいて、本発明によると、それぞれ、秤量センサユニットまたはこれと接続される別のユニットに、接続領域が設けられる。各接続領域は、この領域が、すべての接続領域にとって共通である任意の基準点と、それぞれの固定領域の中心とを結ぶ直線の方向に直線的(平行移動の)または少なくとも略直線的変位運動を実現することができるように、秤量センサユニットもしくは別のユニットと継手構造によって接続されるか、もしくは当該ユニットに取り付けられる。このようにして、熱膨張は、互いに接続された構成要素において応力を上昇させるのではなく、選択された基準点に対する固定点の直線的運動をもたらす。継手構造によって可能にされる運動経路は、少なくとも、基準点と接続領域の当該中心との間を結ぶ直線に沿った、被接続ユニットおよび秤量センサユニットの所定の温度範囲での熱膨張の最大限可能な差と、同じ大きさでなければならない。
【0014】
本発明によると、各接続領域は、先に説明した運動自由度が生じるように、撓みヒンジ(Festkorpergelenk)構造によって基体もしくは支持用の被接続ユニットと接続される。撓みヒンジ構造は、基体またはこれと接続された被接続ユニットと一体式に形成されてもよいし、あるいは、例えば板バネなどの別個の要素によって形成されてもよい。
本発明の好ましい実施形態によると、撓みヒンジ構造は少なくとも1つの薄肉箇所を含む。
【0015】
本発明の一実施形態によると、被接続ユニットは、固定領域の1つにおいて秤量センサユニットと実質的に固定的(starr)に接続され、この固定領域の中心は基準点をなす。しかし完全に固定的に接続する代わりに、基準点を定義するこの固定領域において、秤量センサユニットまたは被接続ユニットに形成された接続領域を設けてもよく、その場合、この接続領域は、おそらく所望の方向の周辺平行移動運動(marginale translatorische Bewegung)を可能にする。しかし、この接続領域は、組立て時に、両構成要素の載置面を形成する際に製造公差の結果として固定領域に応力が発生しないようにするために必要な方向に、傾倒またはわずかな平行移動運動を可能にするように形成される。例えば、このような「基準点・接続領域」は、1つ以上の薄肉箇所を介して当該構成要素の残りの部分と接続することができ、その場合、薄肉箇所は、基準点と固定領域の中心とを結ぶ直線の方向とは違う方向に、必要なほんのわずかな傾倒または平行移動運動ができるようにする。このような付加的運動は、本発明に係る撓みヒンジによっても、基準点を定義しない接続領域において可能にされる。
【0016】
本発明のさらに別の一実施形態によると、固定領域は一平面上にあり、すなわち、接続領域におけるすべての載置面を一平面上に設けることができる。このことにより、本発明に係る2つの構成要素間の応力のない連結が構造上簡単に実現される。当然のことながら、本発明の一般的教示により、載置面を、3次元的に任意に位置決めすることもできる。
【0017】
これに代わる本発明に係る実施形態では、基準点は、秤量センサユニットに作用する荷重力の軸線によって定義された直線上に設けることができるが、前述のようにすべての固定領域を一平面上に形成する場合、好ましくは、荷重力の方向と当該平面との交点が基準点として選択される。
【0018】
本発明の一実施形態では、接続領域は、秤量センサユニットと接続された、例えば支持プレートまたは荷重プレートとして形成される被接続ユニットに設けることができる。
本発明の好ましい実施形態によると、継手構造は、少なくとも1つの連結要素を含み、該連結要素は、その一端が、好ましくは薄肉箇所として形成された第1の継手を介して接続領域と接続され、他端が、好ましくは薄肉箇所として形成された第2の継手を介して被接続ユニットまたは秤量センサユニットと接続されており、その場合、継手の旋回軸線は、互いに平行に、かつ当該接続領域の中心と基準点とを結ぶ直線の方向に対して垂直に延びる。
【0019】
継手は、好ましくは、その旋回軸線を含む平面が、基準点と当該接続領域の中心とを結ぶ直線に対して垂直に位置するように形成される。これにより、接続領域に対して、さらに遠く離れた旋回軸線によって中心点が定義される円軌道に沿って、可能な変位運動が旋回軸線間の距離に依存して行われる。この場合、接続領域自体は、より近くにある薄肉箇所を介した連結要素との関節式結合によって、引き続きその回転位置合わせされた状態にあり、すなわち、この接続領域自体は旋回しない。したがって、接続領域は、それぞれもう一方の構成要素と堅固に接続され、例えばネジ締結による接続が可能である。変位運動自体は、両旋回軸線の距離によって半径が決定される円軌道上にある。基準点と当該接続領域の中心とを結ぶ直線に沿う方向の実質的に直線的な平行移動運動が望ましいので、所望の直線運動経路に対する所定の運動曲線の曲率が無視できる大きさになるように、旋回軸線間の距離を選択する。言い換えると、所定の運動軌道の半径は、基準点と接続領域の中心とを結ぶ直線の方向の所望の全運動経路において、円軌道ゆえの側方のずれが所望の方向の相応の運動経路に比べて小さいという条件が満たされるように選択される。
【0020】
さらに別の一実施形態によると、継手構造は、このように関節式に結合され平行四辺形に配置された2つ(またはそれ以上)の連結要素を含んでもよい。こうすることにより、接続領域は、それぞれ別の要素と堅固に接続されなくても旋回運動をせず、薄肉箇所の両旋回軸線に対して垂直の平面上で所定の円軌道に沿って所定の変位運動のみを実行することができるようにその位置で固定される。
【0021】
本発明の別の一実施形態によると、継手構造は2つ以上の連結要素を含み、これらの連結要素が、薄肉箇所として形成され得るそれぞれ2つの継手を介して、一方では接続領域と接続されると共に、他方では、秤量センサユニットと接続される被接続ユニットと接続され、或いは秤量センサユニット自体と接続されており、その場合、それぞれ1つの連結要素の継手軸線が一平面上にあり、かつ、それぞれ1つ以上の連結要素が接続領域のそれぞれ対向する側に配置される。
【0022】
秤量センサユニットは固定脚を有することができ、これらの固定脚は、これと接続された被接続ユニットの接続領域上に載置され、かつ、好ましくはネジ締結によって接続領域と接続される。このことにより、構造簡単、製造容易、低コストの設計になる。当然のことながら、同様に、秤量センサユニットと接続された被接続ユニットは、秤量センサユニットの接続領域上に載置されてこれと接続される固定脚を有してもよい。
【0023】
他の実施形態は、従属請求項から明らかになる。
図面に示した実施例を参照して、本発明について以下に詳細に説明する。
【図面の簡単な説明】
【0024】
【図1】支持プレート上の3つの固定領域に取り付けられる秤量セルから構成される秤量装置の平面斜視図であり、この場合、固定領域の1つが実質的に位置固定の基準点を形成する。
【図2】図1の実施形態の固定領域の拡大図である。
【図3】図1の秤量装置の平面図である。
【図4】図1と同様であるが、平行四辺形状の撓みヒンジを介して支持プレートと接続される接続領域を有する別の実施形態の固定領域の拡大図である。
【図5】4つの固定領域で支持プレートとボルト留め可能な秤量セル用の支持プレートの平面図であり、この場合、固定領域の1つが位置固定の基準点を形成する。
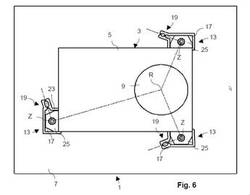
【図6】図1と同様であるが、仮想の基準点が荷重受けの中央に定義される秤量装置の平面図である。
【図7】図1〜図3と同様の秤量装置の別の実施形態の平面図であり、この場合、位置固定の基準点を定義する固定領域は、完全に固定的に形成される。
【図8】中間プレートを備えるセンサユニットから構成される秤量装置の平面斜視図であり、この中間プレートの3つの固定領域に荷重プレートが取り付けられ、この場合、固定領域の1つが位置固定の基準点を形成する。
【図9】図8の秤量装置の側面斜視図であり、この場合、中間プレートに荷重プレートが取り付けられる。
【発明を実施するための形態】
【0025】
図1に示した秤量装置1は、秤量セル3として形成された秤量センサユニット5を含む。秤量センサユニット5は、固有の秤量センサ(図示せず)が配置されるハウジングを備える。秤量センサは、電磁力補償の原理に従って動作し、また位置固定の領域を備える基体を含むことができ、この領域に、2つの平行四辺形連接棒を介して荷重受け9が配置される。平行四辺形連接棒の運動は、単段または多段のレバー伝動装置を介して最後のレバーのレバーアームに伝達することができる。最後のレバーには、電磁石を含む磁石システムが配置され、電磁石のコイル電流は、当該の最後のレバーアームが定義位置に保持されるように制御される。次に、コイル電流は、荷重受け9を付勢する荷重力の尺度として使用される。
【0026】
しかし、基本的に、秤量センサユニット5は任意の他の方法でも形成することができる。本発明の目的は、両方の構成要素のために使用される異なる材料の場合においても、異なる温度膨張が両方の構成要素、特に秤量センサユニット5の許容できない高い応力をもたらさないように、機械的応力に対し敏感な秤量装置1の秤量センサユニット5(それが全体の秤量セルまたは固有の秤量センサであるにしろ)と、別のユニットまたは構成要素、例えば支持プレート7として形成された支持用被接続ユニットとを接続することである。
【0027】
秤量セル3は、図1に示した実施形態の場合、3つの固定領域11または13において支持プレート7と接続され、この場合、固定領域11における固定は実質的に固定的にまたは位置固定して形成され、また固定領域13は、秤量セル3または秤量セル3の秤量センサユニット(ハウジング)5と支持プレート7との間の僅かな相対運動を可能にする。実質的に固定的または位置固定の固定領域11は基準点R(図3)として使用される。
【0028】
固定領域11、13では、支持プレートに接続領域15、17が形成され、この場合、接続領域17は、接続領域17の基準点Rおよび中心Zそれぞれを通して接続直線に沿って実質的に平行移動して運動可能である。接続領域17の中心Zは、例えば、当該接続領域17の表面の重心として定義することができる。しかし、結局のところ、中心Zの正確な位置には実際には大きな意味はないが、この理由は、固定領域11、13の両方の構成要素の摩擦結合、確動結合または材料結合による接続によって熱応力を発生させないために、秤量セル3の空間的寸法に対し、固定領域11、13または接続領域15、17の空間的拡大を小さく選択しなければならないからである。
【0029】
中心Zまたは基準点Rの点は、秤量セル3と支持プレート7または当該接続領域15、17との間の接触面に位置する。
この点で、図示した実施形態では、秤量セル3および例えば支持プレート7として形成されたユニットが互いに当接する固定領域または載置面が一平面に位置することが認識されよう。しかし、このことは、本発明を実現するために必要ではない。むしろ、同様に、固定領域を任意の空間的配置で設けることが可能である。
【0030】
両方の構成要素の間の実質的に平行移動の相対運動を可能にする接続領域17は、常に、それぞれの接続直線のそれぞれ望ましい平行移動の運動方向が、当該接続領域17の基準点Rと中心Zとの間で行われるように、当該構成要素に、すなわち支持プレート7または秤量センサユニット5に、配置されなければならない。
【0031】
図1〜図3から明らかなように、実質的に平行移動して運動可能な接続領域15、17は、撓みヒンジ構造として形成される継手構造19を介して支持プレート7と接続される。
この点で、湾曲した経路(一平面に位置する)に沿う変位運動によっても、実質的に平行移動の、すなわち線形の変位運動を近似させることができることが認識されよう。この場合、例えば、十分に大きな半径を有する円軌道を対象とすることができる。
【0032】
継手構造19は、薄肉箇所23として形成された継手を介して支持プレート7と結合され、かつ薄肉箇所23として形成された別の継手を介して接続領域17と接続される連結要素21から構成される。接続領域17が図1〜図3に示したネジ接続によって秤量セル3の秤量センサユニット(ハウジング)5のそれぞれ1つの脚部25と接続されると、脚部25と接続領域17との間の摩擦結合接続によって、連結要素21と接続領域17との間の薄肉箇所23によって定義される旋回軸線を中心とする接続領域17の基本的に可能な回転運動がブロックされる。これによって、基準点Rと接続領域17の当該の中心Zとの間の接続直線の方向における接続領域17またはこの領域と接続された脚部25に関し実質的に平行移動の運動可能性が残る。この場合、厳しく見て円運動が対象とされ、この場合、円運動の半径は、薄肉箇所23によって定義される旋回軸線の距離によって決定される。熱膨張によってもたらされる秤量センサユニット(ハウジング)5と支持プレート7との間の相対運動は比較的小さいので、固有の円運動によって所望の平行移動運動に十分に正確に近似するために、連結要素21または薄肉箇所23の旋回軸線の距離に関し、同様に比較的小さな距離を選択することで十分である。
【0033】
図2から明らかなように、接続領域は、支持プレート7の簡単な切削加工によって実現することができる。同様のことが連結要素21の製造および薄肉箇所23に当てはまる。薄肉箇所23は、一方で、支持プレート7における接続領域17のヒンジ結合の十分な剛性または堅牢性を保証し、他方で、それぞれの旋回軸線を中心とする曲げ運動に対し十分に小さな抵抗を実現する強度で形成される。継手構造19の形成は、これらの構成要素に作用する運動、例えば振動の結果としての秤量セル3と支持プレート7との間の振動運動が、大部分回避されるかまたは十分減衰されるように行われることが好ましい。
【0034】
図2に明らかなように、連結要素21は、薄肉箇所23と同様に中心面に対し対称に形成することができる。次に、薄肉箇所23の旋回軸線は、薄肉箇所23の最も薄い厚さの領域の当該の中心面に位置する。しかし、薄肉箇所23または連結要素21を異なって配置するかまたは形成することも可能である。連結要素および両方の薄肉箇所23によって定義された円運動が、十分な正確さで所望の平行移動運動に近似することのみに配慮すればよい。
【0035】
しかし、中心面または薄肉箇所23の両方の旋回軸線によって定義された平面が所望の運動方向に対し垂直に延在する固定領域13における図2に示した配置は、これによって定義された両方の運動方向の円運動が、所望の平行移動の運動方向とはそれぞれ僅かに異なるに過ぎないという利点を有する。
【0036】
図1〜図3から明らかなように、固定領域11の接続領域15は、同様に薄肉箇所23を介して支持プレート7と接続することができる。この薄肉箇所23は、接続領域15または基準点Rのおそらくは最小の運動を許容する。この薄肉箇所23の主要な役目は、薄肉箇所23の変形によって、理想的には一平面に位置すべきであろう支持プレート7または秤量センサユニット(ハウジング)5の脚部25の下方載置面の平坦度に関する製造公差を補正することである。この場合、薄肉箇所23は、接続領域15の表面を当該の脚部25の下側に可能な限り均一に押し付けるために、簡単な傾斜運動を許容する。
【0037】
図7に示した秤量装置1の変形例は、秤量セル3用の支持プレート7を示しており、この場合、固定領域11の支持プレート7は、図1〜図3の実施形態の場合と異なり、別個の接続領域を備えない。むしろ、秤量セル3の当該脚部25は、図7に示した孔を介して支持プレート7と直接接続され、この場合、孔の軸線の交点は、支持プレート7の表面と共に基準点Rを形成する。
【0038】
図4は、撓みヒンジとして形成された継手構造19の別の実施形態を示しており、継手構造は、薄肉箇所23によって形成された撓みヒンジを介してそれぞれ接続領域17または支持プレート7と接続される2つの連結要素21を含む。連結要素21および薄肉箇所23は平行四辺形を定義し、この場合、薄肉箇所23によって定義される旋回軸線は、2つの互いに平行の中心面に位置する。中心面は、同時に、薄肉箇所23および連結要素21用の対称面を形成する。
【0039】
このように形成された継手構造(撓みヒンジ構造)19は、より高い剛性の利点を提供し、さらに接続領域17のために、容易に秤量センサユニット(ハウジング)5の当該の脚部25との摩擦結合接続なしに、1つのみの実質的に平行移動の運動が可能になる。
【0040】
図5には、秤量セル3の秤量センサユニット(ハウジング)5と接続可能である支持プレート7として形成されたユニットの別の代替形態が示されている。この支持プレート7も、位置固定の固定領域11を備え、この領域は、基部プレートの上に取り付けられるべき要素、例えば秤量セルまたは秤量センサとのネジ接続を形成するための孔を含む。孔の軸線または軸線と支持プレート7の表面との交点は、基準点Rを構成する。
【0041】
さらに、支持プレート7は、平行移動して運動可能な3つの接続領域17を含み、この接続領域は、同様に、支持プレート7と接続すべき別の要素とネジ接続を形成するためのそれぞれ1つの孔を備える。接続領域17は、それぞれ、当該の接続領域17の表面との軸線の交点における孔の軸線を通してそれぞれ位置する各々の接続領域の中心Zが、基準点Rと当該の中心Zを通して接続直線に沿って実質的に純粋に平行移動して運動可能であるように配置される。このため、接続領域17の2つが、それぞれ、再び平行四辺形状の継手構造(撓みヒンジ構造)19を介して支持プレート7と接続される。しかし、継手構造(撓みヒンジ構造)19は、この場合、図4による実施形態の場合と異なって、3つの平行四辺形連接棒を備え、この場合、これらの平行四辺形連接棒の各々は、図4による実施形態の場合におけるように形成される。
【0042】
より多くの数の平行四辺形連接棒の使用は、当該の薄肉箇所の回転軸線の方向と一致しないか、またはこの回転軸線に対し平行である回転軸線の方向またはこの回転軸線を中心とするねじり剛性の改良をもたらす。
【0043】
運動可能な接続領域17の第3の領域は、同様に2つの連結要素21を備える継手構造(撓みヒンジ構造)19を介して支持プレート7と接続され、2つの連結要素は、薄肉箇所23を介して接続領域とそれぞれ接続され、また別の薄肉箇所23を介して支持プレート7と接続される。しかし、両方の連結要素は、接続領域17の相互に対向する側に設けられ、この場合、薄肉箇所23によって形成される旋回軸線全体は一平面に位置する。この平面は、同時に再び、対称に形成された連結要素21および薄肉箇所23の中心面を形成する。
【0044】
継手構造(撓みヒンジ構造)19のこの変形例は、図5に示されているように、当該接続領域が、基準点Rに対し対角線に位置する長方形の支持用被接続ユニットの縁部に位置する場合、特に考慮に値する。
【0045】
図6に示した秤量装置1の平面図は、図1〜図3による実施形態と大部分が同一またはほぼ同一である。しかし、図3に示した実施形態の場合と異なり、ここでは、図3で実質的に固定的に形成された接続領域15は、同様に、平行移動して運動可能な接続領域17として形成される。基準点Rは、ここで垂直の交点において、荷重受け9の中心を通して支持プレート7の表面により形成される。接続領域は、同様に図1〜図3による実施形態の場合のように、簡単な継手構造(撓みヒンジ構造)19によって、図1〜図3による実施形態の継手構造(撓みヒンジ構造)19と同一である支持プレート7と接続される。ただ、実質的に平行移動の運動方向が、僅かに異なって、すなわち接続領域17の各々が、接続領域17の中心Z(接続領域17のそれぞれの表面と、ネジ接続用の孔の長手軸線との交点)と、基準点Rとを通して接続直線に沿って運動可能であるように選択される。
【0046】
当然、これらの継手構造のためにも、前述の別の変形例も使用することができる。同様のことが、当然、所望の(実質的に)平行移動の運動方向の運動を可能にする撓みヒンジの各々の任意の他の構造にも当てはまる。
【0047】
図6に示した秤量装置1の実施形態は、熱膨張の場合にも、荷重受け9の中心が正確に所望の位置に留まるという利点を有する。このことは、個々の継手構造(撓みヒンジ構造)19の変形のエネルギが同一の程度にある場合に少なくとも当てはまる。
【0048】
継手構造は、必要な変形力に関し、しかし基準点Rに関し中心Zの位置に応じても、基準点Rの位置が、温度膨張の際に少なくとも秤量装置1用の所定の動作温度範囲にわたって高い正確さで同一の位置に保持されるように、寸法決めすることができる。
【0049】
秤量セル3の秤量センサユニット(ハウジング)5における脚部25の図面に示した使用、または支持用被接続ユニットに固定されるべき構成要素における脚部の使用は、それぞれ所望の方向に平行移動して運動可能な接続領域の使用に加えて、ネジ締結によって生じる応力が、応力に敏感な固有の部分に障害となるように伝達しないことを保証する。脚部は、このため、図2と図4に示したように、それぞれ比較的薄い接続領域を介して固有のハウジングと接続することができる。
【0050】
上述の実施形態で使用された一体式に形成された撓みヒンジ構造は、別個の継手要素によっても実現することができる。例えば、薄肉箇所の代わりに、別個の板バネも使用することができるが、当然、これは両方の端部に相応して保持するかまたは挟み込まなければならない。さらに、例えば、両方の端部に薄肉形態の継手を備える連結要素を、長い板バネで置き換えることもできる。最後に、固定の連結要素の一方または両方の端部を、通常の継手による結合とすることもできる。これらの変形例のすべては、小さな運動経路のために実質的に平行移動の運動として理解することができる、円軌道に沿う接続領域の変位運動を可能にする。
【0051】
以下に、前述した熱応力が生じない接続原理を、秤量セルを支持プレート上に組み立てるために使用するのではなく、荷重プレートを秤量センサユニットに結合するために使用する別の実施形態について説明する。
【0052】
図8と図9は、秤量センサユニット5を備える秤量装置100を示しており、その荷重受けの領域に中間プレート70が形成される。この中間プレート70は、図1〜図5と関連して説明した支持プレート7と同様の方法で形成することができ、この結果、中間プレート70の上に被接続ユニットを応力なしで固定することができる。
【0053】
図8から明らかなように、中間プレート70は、被接続ユニットを固定するための孔が設けられる固定の固定領域11を備える。中間プレート70は基準点Rを形成する。さらに、中間プレート70は、継手構造(撓みヒンジ構造)19を介して中間プレート70と接続されるそれぞれ1つの運動可能な接続領域17を有する、運動可能な3つの固定領域13を備える。撓みヒンジの配置および形成に関し、図1〜図7と関連する上述の実施形態が参照される。図8と図9に示したこの実施形態の場合、固定領域11、13は、すなわち秤量センサユニットの基体に設けられ、前述の実施形態の場合のように、基体と接続されるべき被接続ユニットには設けられない。
【0054】
図9は、このような被接続ユニットとして、4つの円筒状脚部250を備える荷重プレート72を示しており、脚部は、詳細には示していない方法で中間プレート70と接続され、例えばネジ締結される。脚部250は、荷重プレート72を秤量セル3から電気的および熱的に絶縁するために、例えば、セラミックのような電気的また熱的な絶縁材料から形成することができる。
【技術分野】
【0001】
本発明は、請求項1の前提部の特徴を有する秤量装置、特に電磁力補償の原理で作動する秤量装置に関する。
【背景技術】
【0002】
秤量技術では、異なった材料からなる構成要素を繋ぎ合わせることがしばしば必要になり、その場合、構成要素の1つは、例えば秤量セルなどであり、この秤量セルは機械的応力に敏感に反応する。こうした機械的応力は、両構成要素を接続しただけでも生じる可能性があるが、両構成要素を当初の温度では機械的応力がない状態で互いに接続した場合でも、その後の温度変化による熱膨張が両構成要素で異なることによって機械的応力が生じることもある。
【0003】
電流力補償の原理で作動する秤量セルでは、レバー機構は、しばしばアルミニウムのインゴットから作り出される。これに対してベースプレートは、他の、例えば特殊鋼などの材料からなることが多い。しかし、秤量セルのハウジング全体がアルミニウムからなることもあるし、秤量セルと接続され、例えばネジ締結される架台が鋼から製造されることもある。その場合、温度が変化すると、接触面が変形するか、相対して変位さえするという問題が生じる。外形の変化、または機械的応力の発生は、場合によっては計測値を検出するセンサにまで及び、計測誤差を生ぜしめる可能性がある。
【0004】
センサの精度を損なうこうした応力を防止するために、本来の秤量システムを、それ自体がベースプレートと接続された保持金具によってベースプレートに固定することが、特許文献1(DE102005033952B4)によって公知である。この特許文献1では、秤量システムが保持金具とカンチレバー式に接続され、例えばネジ締結が可能である。こうすることで、少なくともベースプレートのねじれが秤量システムに伝達されない。しかし、このように固定しても、秤量システムおよびクリップの材料の膨張係数が異なるために生じる熱応力は避けることができない。
【0005】
別の特許文献2(DE60206339T2)から、電磁力補償の原理で作動する秤量セルの基体のための固定構造が公知であり、この特許文献2では、基体は、本来の力計測システムから突出する側方フランジ要素を有し、このフランジは、固定ネジのための孔をもつ。このことにより、組み立てることによって引き起こされた応力が秤量セルの領域に伝達され、その応力で計測結果の精度が損なわれることが防止される。しかし、フランジ要素は、残りの基体と単一片に形成されているので、これを確実には防止できない。
【0006】
さらに別の類似のアプローチが特許文献3(DE19535202C1)に記載されている。この特許文献3では、基体に切り込みを入れることにより固定領域を切り離し、これらの領域に発生した応力またはねじれが本来のセンサ領域、すなわち計測値の検出の精度に影響を及ぼす基体の領域に伝達されることを防止する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】DE102005033952B4
【特許文献2】DE60206339T2
【特許文献3】DE19535202C1
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、こうした公知の解決策は、わずかな機械的応力に対しても敏感に反応する秤量装置の力計測センサまたはセンサ領域において、計測精度が損なわれることを、結局、ほとんど防止できていない。
【課題を解決するための手段】
【0009】
本発明は、上記の従来技術を出発点として、本来の秤量センサユニットの組立て時に温度が変動した場合、或いは組立て後に温度が変動した場合でも、秤量センサユニットの高感度領域に応力が伝達されて秤量装置の計測値検出の精度もしくは温度安定性、および長期安定性に不利な影響が及ぶのを防止する秤量装置を提供するという課題にもとづいている。
【0010】
本発明は上記課題を請求項1の特徴によって解決する。
本発明は、温度変化に基づく膨張が数学的近似写像に対応し、すなわち、ボディの縦横比と角度とはそのままであるという知見を出発点とする。すなわち、異なった材料からなる要素の熱膨張があった場合の固定点の相対する変位は任意ではなく、上述の法則性に支配されている。
【0011】
異なった材料の2つの構成要素が、少なくとも3つの固定領域において互いに接続される。構成要素が形状結合、力学的結合、または素材結合により、互いに堅固に接続される固定領域、すなわち両構成要素の領域は、構成要素の全寸法に対してわずかしか膨張しないので、固定領域の内部に形成される応力は、秤量センサユニットに対するその影響に関して無視することができる。固定領域が点状であることが理想的であるが、これは技術的に実現できるものではない。実際には、固定領域は、例えば、ねじ込み接続を実現するために必要な寸法を有する。
【0012】
秤量装置の秤量センサユニットは、接続されるべき2つの構成要素のうちの1つであり、その場合、秤量センサユニットは、少なくとも3つの固定領域において、例えば支持プレートまたは荷重プレートなどの別のユニットと接続される。秤量装置の「秤量センサユニット」という用語は、本明細書の範囲内で、荷重力が導入される本来のセンサ領域と、当該センサ領域と堅固に(単一ピースに、または着脱可能に)接続されるすべてのものを含む。例えば、秤量センサユニットは、いわゆる電磁力補償の原理で作動する計測セルのモノリシックブロックであり得るし、このようなモノリシックブロックが収容されるハウジングでもあり得る。本発明に係る「固定」は、特に秤量センサユニットもしくはモノリシックブロックそれ自体と底プレートまたは支持プレートとの間、あるいはモノリシックブロックを収容してこれと堅固に接続されたハウジングと底プレートまたは支持プレートとの間で行われるが、その場合、底プレートは、本明細書の用語上では別のユニットである。しかし、前記「固定」は、例えば荷重プレートなどの別のユニットと秤量センサユニットもしくはモノリシックブロックとの間で行うこともできる。
【0013】
少なくとも3つの固定領域の少なくとも2つにおいて、本発明によると、それぞれ、秤量センサユニットまたはこれと接続される別のユニットに、接続領域が設けられる。各接続領域は、この領域が、すべての接続領域にとって共通である任意の基準点と、それぞれの固定領域の中心とを結ぶ直線の方向に直線的(平行移動の)または少なくとも略直線的変位運動を実現することができるように、秤量センサユニットもしくは別のユニットと継手構造によって接続されるか、もしくは当該ユニットに取り付けられる。このようにして、熱膨張は、互いに接続された構成要素において応力を上昇させるのではなく、選択された基準点に対する固定点の直線的運動をもたらす。継手構造によって可能にされる運動経路は、少なくとも、基準点と接続領域の当該中心との間を結ぶ直線に沿った、被接続ユニットおよび秤量センサユニットの所定の温度範囲での熱膨張の最大限可能な差と、同じ大きさでなければならない。
【0014】
本発明によると、各接続領域は、先に説明した運動自由度が生じるように、撓みヒンジ(Festkorpergelenk)構造によって基体もしくは支持用の被接続ユニットと接続される。撓みヒンジ構造は、基体またはこれと接続された被接続ユニットと一体式に形成されてもよいし、あるいは、例えば板バネなどの別個の要素によって形成されてもよい。
本発明の好ましい実施形態によると、撓みヒンジ構造は少なくとも1つの薄肉箇所を含む。
【0015】
本発明の一実施形態によると、被接続ユニットは、固定領域の1つにおいて秤量センサユニットと実質的に固定的(starr)に接続され、この固定領域の中心は基準点をなす。しかし完全に固定的に接続する代わりに、基準点を定義するこの固定領域において、秤量センサユニットまたは被接続ユニットに形成された接続領域を設けてもよく、その場合、この接続領域は、おそらく所望の方向の周辺平行移動運動(marginale translatorische Bewegung)を可能にする。しかし、この接続領域は、組立て時に、両構成要素の載置面を形成する際に製造公差の結果として固定領域に応力が発生しないようにするために必要な方向に、傾倒またはわずかな平行移動運動を可能にするように形成される。例えば、このような「基準点・接続領域」は、1つ以上の薄肉箇所を介して当該構成要素の残りの部分と接続することができ、その場合、薄肉箇所は、基準点と固定領域の中心とを結ぶ直線の方向とは違う方向に、必要なほんのわずかな傾倒または平行移動運動ができるようにする。このような付加的運動は、本発明に係る撓みヒンジによっても、基準点を定義しない接続領域において可能にされる。
【0016】
本発明のさらに別の一実施形態によると、固定領域は一平面上にあり、すなわち、接続領域におけるすべての載置面を一平面上に設けることができる。このことにより、本発明に係る2つの構成要素間の応力のない連結が構造上簡単に実現される。当然のことながら、本発明の一般的教示により、載置面を、3次元的に任意に位置決めすることもできる。
【0017】
これに代わる本発明に係る実施形態では、基準点は、秤量センサユニットに作用する荷重力の軸線によって定義された直線上に設けることができるが、前述のようにすべての固定領域を一平面上に形成する場合、好ましくは、荷重力の方向と当該平面との交点が基準点として選択される。
【0018】
本発明の一実施形態では、接続領域は、秤量センサユニットと接続された、例えば支持プレートまたは荷重プレートとして形成される被接続ユニットに設けることができる。
本発明の好ましい実施形態によると、継手構造は、少なくとも1つの連結要素を含み、該連結要素は、その一端が、好ましくは薄肉箇所として形成された第1の継手を介して接続領域と接続され、他端が、好ましくは薄肉箇所として形成された第2の継手を介して被接続ユニットまたは秤量センサユニットと接続されており、その場合、継手の旋回軸線は、互いに平行に、かつ当該接続領域の中心と基準点とを結ぶ直線の方向に対して垂直に延びる。
【0019】
継手は、好ましくは、その旋回軸線を含む平面が、基準点と当該接続領域の中心とを結ぶ直線に対して垂直に位置するように形成される。これにより、接続領域に対して、さらに遠く離れた旋回軸線によって中心点が定義される円軌道に沿って、可能な変位運動が旋回軸線間の距離に依存して行われる。この場合、接続領域自体は、より近くにある薄肉箇所を介した連結要素との関節式結合によって、引き続きその回転位置合わせされた状態にあり、すなわち、この接続領域自体は旋回しない。したがって、接続領域は、それぞれもう一方の構成要素と堅固に接続され、例えばネジ締結による接続が可能である。変位運動自体は、両旋回軸線の距離によって半径が決定される円軌道上にある。基準点と当該接続領域の中心とを結ぶ直線に沿う方向の実質的に直線的な平行移動運動が望ましいので、所望の直線運動経路に対する所定の運動曲線の曲率が無視できる大きさになるように、旋回軸線間の距離を選択する。言い換えると、所定の運動軌道の半径は、基準点と接続領域の中心とを結ぶ直線の方向の所望の全運動経路において、円軌道ゆえの側方のずれが所望の方向の相応の運動経路に比べて小さいという条件が満たされるように選択される。
【0020】
さらに別の一実施形態によると、継手構造は、このように関節式に結合され平行四辺形に配置された2つ(またはそれ以上)の連結要素を含んでもよい。こうすることにより、接続領域は、それぞれ別の要素と堅固に接続されなくても旋回運動をせず、薄肉箇所の両旋回軸線に対して垂直の平面上で所定の円軌道に沿って所定の変位運動のみを実行することができるようにその位置で固定される。
【0021】
本発明の別の一実施形態によると、継手構造は2つ以上の連結要素を含み、これらの連結要素が、薄肉箇所として形成され得るそれぞれ2つの継手を介して、一方では接続領域と接続されると共に、他方では、秤量センサユニットと接続される被接続ユニットと接続され、或いは秤量センサユニット自体と接続されており、その場合、それぞれ1つの連結要素の継手軸線が一平面上にあり、かつ、それぞれ1つ以上の連結要素が接続領域のそれぞれ対向する側に配置される。
【0022】
秤量センサユニットは固定脚を有することができ、これらの固定脚は、これと接続された被接続ユニットの接続領域上に載置され、かつ、好ましくはネジ締結によって接続領域と接続される。このことにより、構造簡単、製造容易、低コストの設計になる。当然のことながら、同様に、秤量センサユニットと接続された被接続ユニットは、秤量センサユニットの接続領域上に載置されてこれと接続される固定脚を有してもよい。
【0023】
他の実施形態は、従属請求項から明らかになる。
図面に示した実施例を参照して、本発明について以下に詳細に説明する。
【図面の簡単な説明】
【0024】
【図1】支持プレート上の3つの固定領域に取り付けられる秤量セルから構成される秤量装置の平面斜視図であり、この場合、固定領域の1つが実質的に位置固定の基準点を形成する。
【図2】図1の実施形態の固定領域の拡大図である。
【図3】図1の秤量装置の平面図である。
【図4】図1と同様であるが、平行四辺形状の撓みヒンジを介して支持プレートと接続される接続領域を有する別の実施形態の固定領域の拡大図である。
【図5】4つの固定領域で支持プレートとボルト留め可能な秤量セル用の支持プレートの平面図であり、この場合、固定領域の1つが位置固定の基準点を形成する。
【図6】図1と同様であるが、仮想の基準点が荷重受けの中央に定義される秤量装置の平面図である。
【図7】図1〜図3と同様の秤量装置の別の実施形態の平面図であり、この場合、位置固定の基準点を定義する固定領域は、完全に固定的に形成される。
【図8】中間プレートを備えるセンサユニットから構成される秤量装置の平面斜視図であり、この中間プレートの3つの固定領域に荷重プレートが取り付けられ、この場合、固定領域の1つが位置固定の基準点を形成する。
【図9】図8の秤量装置の側面斜視図であり、この場合、中間プレートに荷重プレートが取り付けられる。
【発明を実施するための形態】
【0025】
図1に示した秤量装置1は、秤量セル3として形成された秤量センサユニット5を含む。秤量センサユニット5は、固有の秤量センサ(図示せず)が配置されるハウジングを備える。秤量センサは、電磁力補償の原理に従って動作し、また位置固定の領域を備える基体を含むことができ、この領域に、2つの平行四辺形連接棒を介して荷重受け9が配置される。平行四辺形連接棒の運動は、単段または多段のレバー伝動装置を介して最後のレバーのレバーアームに伝達することができる。最後のレバーには、電磁石を含む磁石システムが配置され、電磁石のコイル電流は、当該の最後のレバーアームが定義位置に保持されるように制御される。次に、コイル電流は、荷重受け9を付勢する荷重力の尺度として使用される。
【0026】
しかし、基本的に、秤量センサユニット5は任意の他の方法でも形成することができる。本発明の目的は、両方の構成要素のために使用される異なる材料の場合においても、異なる温度膨張が両方の構成要素、特に秤量センサユニット5の許容できない高い応力をもたらさないように、機械的応力に対し敏感な秤量装置1の秤量センサユニット5(それが全体の秤量セルまたは固有の秤量センサであるにしろ)と、別のユニットまたは構成要素、例えば支持プレート7として形成された支持用被接続ユニットとを接続することである。
【0027】
秤量セル3は、図1に示した実施形態の場合、3つの固定領域11または13において支持プレート7と接続され、この場合、固定領域11における固定は実質的に固定的にまたは位置固定して形成され、また固定領域13は、秤量セル3または秤量セル3の秤量センサユニット(ハウジング)5と支持プレート7との間の僅かな相対運動を可能にする。実質的に固定的または位置固定の固定領域11は基準点R(図3)として使用される。
【0028】
固定領域11、13では、支持プレートに接続領域15、17が形成され、この場合、接続領域17は、接続領域17の基準点Rおよび中心Zそれぞれを通して接続直線に沿って実質的に平行移動して運動可能である。接続領域17の中心Zは、例えば、当該接続領域17の表面の重心として定義することができる。しかし、結局のところ、中心Zの正確な位置には実際には大きな意味はないが、この理由は、固定領域11、13の両方の構成要素の摩擦結合、確動結合または材料結合による接続によって熱応力を発生させないために、秤量セル3の空間的寸法に対し、固定領域11、13または接続領域15、17の空間的拡大を小さく選択しなければならないからである。
【0029】
中心Zまたは基準点Rの点は、秤量セル3と支持プレート7または当該接続領域15、17との間の接触面に位置する。
この点で、図示した実施形態では、秤量セル3および例えば支持プレート7として形成されたユニットが互いに当接する固定領域または載置面が一平面に位置することが認識されよう。しかし、このことは、本発明を実現するために必要ではない。むしろ、同様に、固定領域を任意の空間的配置で設けることが可能である。
【0030】
両方の構成要素の間の実質的に平行移動の相対運動を可能にする接続領域17は、常に、それぞれの接続直線のそれぞれ望ましい平行移動の運動方向が、当該接続領域17の基準点Rと中心Zとの間で行われるように、当該構成要素に、すなわち支持プレート7または秤量センサユニット5に、配置されなければならない。
【0031】
図1〜図3から明らかなように、実質的に平行移動して運動可能な接続領域15、17は、撓みヒンジ構造として形成される継手構造19を介して支持プレート7と接続される。
この点で、湾曲した経路(一平面に位置する)に沿う変位運動によっても、実質的に平行移動の、すなわち線形の変位運動を近似させることができることが認識されよう。この場合、例えば、十分に大きな半径を有する円軌道を対象とすることができる。
【0032】
継手構造19は、薄肉箇所23として形成された継手を介して支持プレート7と結合され、かつ薄肉箇所23として形成された別の継手を介して接続領域17と接続される連結要素21から構成される。接続領域17が図1〜図3に示したネジ接続によって秤量セル3の秤量センサユニット(ハウジング)5のそれぞれ1つの脚部25と接続されると、脚部25と接続領域17との間の摩擦結合接続によって、連結要素21と接続領域17との間の薄肉箇所23によって定義される旋回軸線を中心とする接続領域17の基本的に可能な回転運動がブロックされる。これによって、基準点Rと接続領域17の当該の中心Zとの間の接続直線の方向における接続領域17またはこの領域と接続された脚部25に関し実質的に平行移動の運動可能性が残る。この場合、厳しく見て円運動が対象とされ、この場合、円運動の半径は、薄肉箇所23によって定義される旋回軸線の距離によって決定される。熱膨張によってもたらされる秤量センサユニット(ハウジング)5と支持プレート7との間の相対運動は比較的小さいので、固有の円運動によって所望の平行移動運動に十分に正確に近似するために、連結要素21または薄肉箇所23の旋回軸線の距離に関し、同様に比較的小さな距離を選択することで十分である。
【0033】
図2から明らかなように、接続領域は、支持プレート7の簡単な切削加工によって実現することができる。同様のことが連結要素21の製造および薄肉箇所23に当てはまる。薄肉箇所23は、一方で、支持プレート7における接続領域17のヒンジ結合の十分な剛性または堅牢性を保証し、他方で、それぞれの旋回軸線を中心とする曲げ運動に対し十分に小さな抵抗を実現する強度で形成される。継手構造19の形成は、これらの構成要素に作用する運動、例えば振動の結果としての秤量セル3と支持プレート7との間の振動運動が、大部分回避されるかまたは十分減衰されるように行われることが好ましい。
【0034】
図2に明らかなように、連結要素21は、薄肉箇所23と同様に中心面に対し対称に形成することができる。次に、薄肉箇所23の旋回軸線は、薄肉箇所23の最も薄い厚さの領域の当該の中心面に位置する。しかし、薄肉箇所23または連結要素21を異なって配置するかまたは形成することも可能である。連結要素および両方の薄肉箇所23によって定義された円運動が、十分な正確さで所望の平行移動運動に近似することのみに配慮すればよい。
【0035】
しかし、中心面または薄肉箇所23の両方の旋回軸線によって定義された平面が所望の運動方向に対し垂直に延在する固定領域13における図2に示した配置は、これによって定義された両方の運動方向の円運動が、所望の平行移動の運動方向とはそれぞれ僅かに異なるに過ぎないという利点を有する。
【0036】
図1〜図3から明らかなように、固定領域11の接続領域15は、同様に薄肉箇所23を介して支持プレート7と接続することができる。この薄肉箇所23は、接続領域15または基準点Rのおそらくは最小の運動を許容する。この薄肉箇所23の主要な役目は、薄肉箇所23の変形によって、理想的には一平面に位置すべきであろう支持プレート7または秤量センサユニット(ハウジング)5の脚部25の下方載置面の平坦度に関する製造公差を補正することである。この場合、薄肉箇所23は、接続領域15の表面を当該の脚部25の下側に可能な限り均一に押し付けるために、簡単な傾斜運動を許容する。
【0037】
図7に示した秤量装置1の変形例は、秤量セル3用の支持プレート7を示しており、この場合、固定領域11の支持プレート7は、図1〜図3の実施形態の場合と異なり、別個の接続領域を備えない。むしろ、秤量セル3の当該脚部25は、図7に示した孔を介して支持プレート7と直接接続され、この場合、孔の軸線の交点は、支持プレート7の表面と共に基準点Rを形成する。
【0038】
図4は、撓みヒンジとして形成された継手構造19の別の実施形態を示しており、継手構造は、薄肉箇所23によって形成された撓みヒンジを介してそれぞれ接続領域17または支持プレート7と接続される2つの連結要素21を含む。連結要素21および薄肉箇所23は平行四辺形を定義し、この場合、薄肉箇所23によって定義される旋回軸線は、2つの互いに平行の中心面に位置する。中心面は、同時に、薄肉箇所23および連結要素21用の対称面を形成する。
【0039】
このように形成された継手構造(撓みヒンジ構造)19は、より高い剛性の利点を提供し、さらに接続領域17のために、容易に秤量センサユニット(ハウジング)5の当該の脚部25との摩擦結合接続なしに、1つのみの実質的に平行移動の運動が可能になる。
【0040】
図5には、秤量セル3の秤量センサユニット(ハウジング)5と接続可能である支持プレート7として形成されたユニットの別の代替形態が示されている。この支持プレート7も、位置固定の固定領域11を備え、この領域は、基部プレートの上に取り付けられるべき要素、例えば秤量セルまたは秤量センサとのネジ接続を形成するための孔を含む。孔の軸線または軸線と支持プレート7の表面との交点は、基準点Rを構成する。
【0041】
さらに、支持プレート7は、平行移動して運動可能な3つの接続領域17を含み、この接続領域は、同様に、支持プレート7と接続すべき別の要素とネジ接続を形成するためのそれぞれ1つの孔を備える。接続領域17は、それぞれ、当該の接続領域17の表面との軸線の交点における孔の軸線を通してそれぞれ位置する各々の接続領域の中心Zが、基準点Rと当該の中心Zを通して接続直線に沿って実質的に純粋に平行移動して運動可能であるように配置される。このため、接続領域17の2つが、それぞれ、再び平行四辺形状の継手構造(撓みヒンジ構造)19を介して支持プレート7と接続される。しかし、継手構造(撓みヒンジ構造)19は、この場合、図4による実施形態の場合と異なって、3つの平行四辺形連接棒を備え、この場合、これらの平行四辺形連接棒の各々は、図4による実施形態の場合におけるように形成される。
【0042】
より多くの数の平行四辺形連接棒の使用は、当該の薄肉箇所の回転軸線の方向と一致しないか、またはこの回転軸線に対し平行である回転軸線の方向またはこの回転軸線を中心とするねじり剛性の改良をもたらす。
【0043】
運動可能な接続領域17の第3の領域は、同様に2つの連結要素21を備える継手構造(撓みヒンジ構造)19を介して支持プレート7と接続され、2つの連結要素は、薄肉箇所23を介して接続領域とそれぞれ接続され、また別の薄肉箇所23を介して支持プレート7と接続される。しかし、両方の連結要素は、接続領域17の相互に対向する側に設けられ、この場合、薄肉箇所23によって形成される旋回軸線全体は一平面に位置する。この平面は、同時に再び、対称に形成された連結要素21および薄肉箇所23の中心面を形成する。
【0044】
継手構造(撓みヒンジ構造)19のこの変形例は、図5に示されているように、当該接続領域が、基準点Rに対し対角線に位置する長方形の支持用被接続ユニットの縁部に位置する場合、特に考慮に値する。
【0045】
図6に示した秤量装置1の平面図は、図1〜図3による実施形態と大部分が同一またはほぼ同一である。しかし、図3に示した実施形態の場合と異なり、ここでは、図3で実質的に固定的に形成された接続領域15は、同様に、平行移動して運動可能な接続領域17として形成される。基準点Rは、ここで垂直の交点において、荷重受け9の中心を通して支持プレート7の表面により形成される。接続領域は、同様に図1〜図3による実施形態の場合のように、簡単な継手構造(撓みヒンジ構造)19によって、図1〜図3による実施形態の継手構造(撓みヒンジ構造)19と同一である支持プレート7と接続される。ただ、実質的に平行移動の運動方向が、僅かに異なって、すなわち接続領域17の各々が、接続領域17の中心Z(接続領域17のそれぞれの表面と、ネジ接続用の孔の長手軸線との交点)と、基準点Rとを通して接続直線に沿って運動可能であるように選択される。
【0046】
当然、これらの継手構造のためにも、前述の別の変形例も使用することができる。同様のことが、当然、所望の(実質的に)平行移動の運動方向の運動を可能にする撓みヒンジの各々の任意の他の構造にも当てはまる。
【0047】
図6に示した秤量装置1の実施形態は、熱膨張の場合にも、荷重受け9の中心が正確に所望の位置に留まるという利点を有する。このことは、個々の継手構造(撓みヒンジ構造)19の変形のエネルギが同一の程度にある場合に少なくとも当てはまる。
【0048】
継手構造は、必要な変形力に関し、しかし基準点Rに関し中心Zの位置に応じても、基準点Rの位置が、温度膨張の際に少なくとも秤量装置1用の所定の動作温度範囲にわたって高い正確さで同一の位置に保持されるように、寸法決めすることができる。
【0049】
秤量セル3の秤量センサユニット(ハウジング)5における脚部25の図面に示した使用、または支持用被接続ユニットに固定されるべき構成要素における脚部の使用は、それぞれ所望の方向に平行移動して運動可能な接続領域の使用に加えて、ネジ締結によって生じる応力が、応力に敏感な固有の部分に障害となるように伝達しないことを保証する。脚部は、このため、図2と図4に示したように、それぞれ比較的薄い接続領域を介して固有のハウジングと接続することができる。
【0050】
上述の実施形態で使用された一体式に形成された撓みヒンジ構造は、別個の継手要素によっても実現することができる。例えば、薄肉箇所の代わりに、別個の板バネも使用することができるが、当然、これは両方の端部に相応して保持するかまたは挟み込まなければならない。さらに、例えば、両方の端部に薄肉形態の継手を備える連結要素を、長い板バネで置き換えることもできる。最後に、固定の連結要素の一方または両方の端部を、通常の継手による結合とすることもできる。これらの変形例のすべては、小さな運動経路のために実質的に平行移動の運動として理解することができる、円軌道に沿う接続領域の変位運動を可能にする。
【0051】
以下に、前述した熱応力が生じない接続原理を、秤量セルを支持プレート上に組み立てるために使用するのではなく、荷重プレートを秤量センサユニットに結合するために使用する別の実施形態について説明する。
【0052】
図8と図9は、秤量センサユニット5を備える秤量装置100を示しており、その荷重受けの領域に中間プレート70が形成される。この中間プレート70は、図1〜図5と関連して説明した支持プレート7と同様の方法で形成することができ、この結果、中間プレート70の上に被接続ユニットを応力なしで固定することができる。
【0053】
図8から明らかなように、中間プレート70は、被接続ユニットを固定するための孔が設けられる固定の固定領域11を備える。中間プレート70は基準点Rを形成する。さらに、中間プレート70は、継手構造(撓みヒンジ構造)19を介して中間プレート70と接続されるそれぞれ1つの運動可能な接続領域17を有する、運動可能な3つの固定領域13を備える。撓みヒンジの配置および形成に関し、図1〜図7と関連する上述の実施形態が参照される。図8と図9に示したこの実施形態の場合、固定領域11、13は、すなわち秤量センサユニットの基体に設けられ、前述の実施形態の場合のように、基体と接続されるべき被接続ユニットには設けられない。
【0054】
図9は、このような被接続ユニットとして、4つの円筒状脚部250を備える荷重プレート72を示しており、脚部は、詳細には示していない方法で中間プレート70と接続され、例えばネジ締結される。脚部250は、荷重プレート72を秤量セル3から電気的および熱的に絶縁するために、例えば、セラミックのような電気的また熱的な絶縁材料から形成することができる。
【特許請求の範囲】
【請求項1】
(a)秤量センサユニット(5)と、
(b)該秤量センサユニット(5)と少なくとも3つの固定領域(11、13)において接続される被接続ユニット(7、72)と
を備えた秤量装置、特に電磁力補償の原理で作動する秤量装置であって、
(c)前記被接続ユニット(7、72)または前記秤量センサユニット(5)は、少なくとも2つの固定領域(13)においてそれぞれ1つの接続領域(17)を有し、該接続領域が継手構造(19)を介して前記被接続ユニット(7、72)または前記秤量センサユニット(5)と接続されていることと、
(d)前記継手構造(19)は、
(i)基準点(R)と前記接続領域(17)の中心(Z)とによって定義された方向への前記接続領域(17)の実質的に平行移動の変位運動を可能にするように、かつ
(ii)前記継手構造(19)により可能にされる運動経路が、少なくとも、前記基準点(R)と前記接続領域(17)の中心(Z)とを結ぶ直線に沿った、前記被接続ユニット(7、72)および前記秤量センサユニット(5)の所定の温度範囲での熱膨張の最大限可能な差と、同じ大きさであるように形成されていることと
を特徴とする、秤量装置。
【請求項2】
前記継手構造(19)は、撓みヒンジ構造として、好ましくは前記被接続ユニット(7)または前記秤量センサユニット(5)と一体式に形成された継手構造(19)として形成されていることを特徴とする、請求項1に記載の秤量装置。
【請求項3】
前記継手構造(19)は、少なくとも1つの薄肉箇所(23)を有することを特徴とする、請求項1または2に記載の秤量装置。
【請求項4】
前記被接続ユニット(7、72)は、前記固定領域(11)の1つにおいて前記秤量センサユニット(5)と実質的に固定的に接続されていることと、該固定領域(11)の中心は前記基準点(R)をなすこととを特徴とする、請求項1から3のいずれか1に記載の秤量装置。
【請求項5】
前記固定領域(11、13)もしくは前記接続領域(15、17)は、一平面上にあることを特徴とする、請求項1から4のいずれか1に記載の秤量装置。
【請求項6】
前記基準点(R)は、荷重力が前記秤量センサユニットに作用する軸線上に、好ましくは荷重力の方向と、前記固定領域(11、13)もしくは前記接続領域(15、17)がある平面との交点にあることを特徴とする、請求項1から5のいずれか1に記載の秤量装置。
【請求項7】
前記被接続ユニットは支持プレート(7)として形成されていることと、前記接続領域(15、17)は、好ましくはそれぞれ1つの継手構造(19)を介して前記支持プレート(7)と接続されていること、または、
前記被接続ユニットは、荷重プレート(72)として形成されていることと、前記接続領域(15、17)は、好ましくはそれぞれ1つの継手構造(19)を介して前記秤量センサユニット(5)と接続されていること
を特徴とする、請求項1から6のいずれか1に記載の秤量装置。
【請求項8】
前記継手構造(19)が少なくとも1つの連結要素(21)を含み、該連結要素は、その一端が、好ましくは薄肉箇所(23)として形成された第1の継手を介して前記接続領域(17)と接続され、他端が、好ましくは薄肉箇所(23)として形成された第2の継手を介して前記被接続ユニット(7)または前記秤量センサユニット(5)と接続されており、その場合、前記継手の旋回軸線は、互いに平行に、かつ当該接続領域(17)の中心(Z)と前記基準点(R)とを結ぶ直線の方向に対して垂直に延びることを特徴とする、請求項1から7のいずれか1に記載の秤量装置。
【請求項9】
前記継手は、前記旋回軸線を含む平面が、前記基準点(R)と当該接続領域(17)の中心(Z)とを結ぶ直線に対して垂直に位置するように形成されていることを特徴とする、請求項8に記載の秤量装置。
【請求項10】
前記継手構造(19)は、請求項8に記載の連結要素(21)を2つ以上含み、該連結要素が平行四辺形に配置されていることを特徴とする、請求項8または9に記載の秤量装置。
【請求項11】
前記継手構造(19)は、2つ以上の連結要素(21)を含み、該連結要素が、その両端に好ましくは薄肉箇所(23)として形成された2つの撓みヒンジを介して、一方では前記接続領域(17)と接続され、他方では前記被接続ユニット(7)または前記秤量センサユニット(5)と接続されており、その場合、各連結要素の前記継手の旋回軸線は同一平面上にあり、その場合、それぞれ1つ以上の連結要素(21)が前記接続領域(17)のそれぞれ対向する側に配置されていることを特徴とする、請求項9に記載の秤量装置。
【請求項12】
前記秤量センサユニット(5)または前記被接続ユニット(7、72)は、固定脚(25、250)を有し、該固定脚は、前記被接続ユニット(7)または前記秤量センサユニット(5)の接続領域(15、17)上に載置されており、かつ前記接続領域(17)と、好ましくはネジ締結により接続されていることを特徴とする、請求項1から11のいずれか1に記載の秤量装置。
【請求項1】
(a)秤量センサユニット(5)と、
(b)該秤量センサユニット(5)と少なくとも3つの固定領域(11、13)において接続される被接続ユニット(7、72)と
を備えた秤量装置、特に電磁力補償の原理で作動する秤量装置であって、
(c)前記被接続ユニット(7、72)または前記秤量センサユニット(5)は、少なくとも2つの固定領域(13)においてそれぞれ1つの接続領域(17)を有し、該接続領域が継手構造(19)を介して前記被接続ユニット(7、72)または前記秤量センサユニット(5)と接続されていることと、
(d)前記継手構造(19)は、
(i)基準点(R)と前記接続領域(17)の中心(Z)とによって定義された方向への前記接続領域(17)の実質的に平行移動の変位運動を可能にするように、かつ
(ii)前記継手構造(19)により可能にされる運動経路が、少なくとも、前記基準点(R)と前記接続領域(17)の中心(Z)とを結ぶ直線に沿った、前記被接続ユニット(7、72)および前記秤量センサユニット(5)の所定の温度範囲での熱膨張の最大限可能な差と、同じ大きさであるように形成されていることと
を特徴とする、秤量装置。
【請求項2】
前記継手構造(19)は、撓みヒンジ構造として、好ましくは前記被接続ユニット(7)または前記秤量センサユニット(5)と一体式に形成された継手構造(19)として形成されていることを特徴とする、請求項1に記載の秤量装置。
【請求項3】
前記継手構造(19)は、少なくとも1つの薄肉箇所(23)を有することを特徴とする、請求項1または2に記載の秤量装置。
【請求項4】
前記被接続ユニット(7、72)は、前記固定領域(11)の1つにおいて前記秤量センサユニット(5)と実質的に固定的に接続されていることと、該固定領域(11)の中心は前記基準点(R)をなすこととを特徴とする、請求項1から3のいずれか1に記載の秤量装置。
【請求項5】
前記固定領域(11、13)もしくは前記接続領域(15、17)は、一平面上にあることを特徴とする、請求項1から4のいずれか1に記載の秤量装置。
【請求項6】
前記基準点(R)は、荷重力が前記秤量センサユニットに作用する軸線上に、好ましくは荷重力の方向と、前記固定領域(11、13)もしくは前記接続領域(15、17)がある平面との交点にあることを特徴とする、請求項1から5のいずれか1に記載の秤量装置。
【請求項7】
前記被接続ユニットは支持プレート(7)として形成されていることと、前記接続領域(15、17)は、好ましくはそれぞれ1つの継手構造(19)を介して前記支持プレート(7)と接続されていること、または、
前記被接続ユニットは、荷重プレート(72)として形成されていることと、前記接続領域(15、17)は、好ましくはそれぞれ1つの継手構造(19)を介して前記秤量センサユニット(5)と接続されていること
を特徴とする、請求項1から6のいずれか1に記載の秤量装置。
【請求項8】
前記継手構造(19)が少なくとも1つの連結要素(21)を含み、該連結要素は、その一端が、好ましくは薄肉箇所(23)として形成された第1の継手を介して前記接続領域(17)と接続され、他端が、好ましくは薄肉箇所(23)として形成された第2の継手を介して前記被接続ユニット(7)または前記秤量センサユニット(5)と接続されており、その場合、前記継手の旋回軸線は、互いに平行に、かつ当該接続領域(17)の中心(Z)と前記基準点(R)とを結ぶ直線の方向に対して垂直に延びることを特徴とする、請求項1から7のいずれか1に記載の秤量装置。
【請求項9】
前記継手は、前記旋回軸線を含む平面が、前記基準点(R)と当該接続領域(17)の中心(Z)とを結ぶ直線に対して垂直に位置するように形成されていることを特徴とする、請求項8に記載の秤量装置。
【請求項10】
前記継手構造(19)は、請求項8に記載の連結要素(21)を2つ以上含み、該連結要素が平行四辺形に配置されていることを特徴とする、請求項8または9に記載の秤量装置。
【請求項11】
前記継手構造(19)は、2つ以上の連結要素(21)を含み、該連結要素が、その両端に好ましくは薄肉箇所(23)として形成された2つの撓みヒンジを介して、一方では前記接続領域(17)と接続され、他方では前記被接続ユニット(7)または前記秤量センサユニット(5)と接続されており、その場合、各連結要素の前記継手の旋回軸線は同一平面上にあり、その場合、それぞれ1つ以上の連結要素(21)が前記接続領域(17)のそれぞれ対向する側に配置されていることを特徴とする、請求項9に記載の秤量装置。
【請求項12】
前記秤量センサユニット(5)または前記被接続ユニット(7、72)は、固定脚(25、250)を有し、該固定脚は、前記被接続ユニット(7)または前記秤量センサユニット(5)の接続領域(15、17)上に載置されており、かつ前記接続領域(17)と、好ましくはネジ締結により接続されていることを特徴とする、請求項1から11のいずれか1に記載の秤量装置。
【図1】



【図2】

【図3】

【図4】

【図5】

【図6】

【図7】

【図8】

【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−68250(P2012−68250A)
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願番号】特願2011−207940(P2011−207940)
【出願日】平成23年9月22日(2011.9.22)
【出願人】(506186673)ヴィポテック ヴィーゲ−ウント ポジティオニエルシステーメ ゲーエムベーハー (21)
【氏名又は名称原語表記】WIPOTEC WIEGE−UND POSITIONIER−SYSTEME GMBH
【住所又は居所原語表記】ADAM−HOFFMANN STRASSE 26, 67657 KAISERSLAUTERN,GERMANY
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願日】平成23年9月22日(2011.9.22)
【出願人】(506186673)ヴィポテック ヴィーゲ−ウント ポジティオニエルシステーメ ゲーエムベーハー (21)
【氏名又は名称原語表記】WIPOTEC WIEGE−UND POSITIONIER−SYSTEME GMBH
【住所又は居所原語表記】ADAM−HOFFMANN STRASSE 26, 67657 KAISERSLAUTERN,GERMANY
[ Back to top ]