
重量検出装置
【課題】スペース的な余裕がない場合でも、床振動検出用の計量センサを搭載することが可能な重量検出装置を提供する。
【解決手段】重量チェッカ1では、搬送方向Aに直交する方向に複数のコンベア3ba〜3bcを並列配置している。各コンベア3ba〜3bcは、被計量物Xの計量を行うロードセル5と、ロードセル5が計量中に床面から受けた振動の影響を検出してこれを排除するAFV6とを搭載している。AFV6は、並列配置された複数のコンベア3ba〜3bcにまたがるようにして搬送方向Aに直交する方向に延びるフレーム20の内部空間に収納されている。
【解決手段】重量チェッカ1では、搬送方向Aに直交する方向に複数のコンベア3ba〜3bcを並列配置している。各コンベア3ba〜3bcは、被計量物Xの計量を行うロードセル5と、ロードセル5が計量中に床面から受けた振動の影響を検出してこれを排除するAFV6とを搭載している。AFV6は、並列配置された複数のコンベア3ba〜3bcにまたがるようにして搬送方向Aに直交する方向に延びるフレーム20の内部空間に収納されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、床面における振動の影響を除去するために振動検出用のロードセル等の検出センサを備えた重量検出装置に関する。
【背景技術】
【0002】
近年、被計量物を搬送しながらその計量を行う重量検出装置において、床面からの振動の影響を除去するために、被計量物の計量を行う第1計量センサ(ロードセル)の近傍に、床振動成分を検出する第2計量センサ(ロードセル)を別途設けた装置が提供されている。
例えば、特許文献1には、床面と接触する柱部分における第1計量センサの反対側に床振動検出用の第2計量センサを取り付けた重量検出装置が開示されている。これによれば、装置据付側および物品載置側からの振動外乱の影響を除去して検出精度の向上を図ることが可能になる。
【特許文献1】特開2004−309148号公報(平成15年11月4日公開)
【特許文献2】特開2002−039845号公報(平成14年2月6日公開)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記従来の重量検出装置では、以下に示すような問題点を有している。
すなわち、上記公報に開示された重量検出装置では、被計量物の大きさについては特に考慮されていないが、実際の計量では、例えば、スティックシュガーのような細くて小さいものを計量することも考えられる。このような小さい被計量物は、一般的に、上流側に配置された包装機等から排出される際に5〜6個が同時に搬送コンベア上に排出されるため、単位時間当たりの処理量が非常に多くなることから、計量精度が低下しないように搬送コンベアの幅および装置自身の大きさを小さく設計する必要がある。
【0004】
しかし、上記公報に開示された重量検出装置では、装置の大きさに制限があったり、搬送コンベアの幅を狭くしたりする場合には、床振動検出用の第2計量センサを取り付けるスペースが確保できなくなる場合がある。
本発明の課題は、スペース的な余裕がない場合でも、床振動検出用の計量センサを搭載することが可能な重量検出装置を提供することにある。
【課題を解決するための手段】
【0005】
第1の発明に係る重量検出装置は、被計量物を搬送しながら計量を行う重量検出装置であって、互いに並列配置された複数の計量搬送機構と、支持部材と、を備えている。複数の計量搬送機構のそれぞれは、被計量物を搬送する搬送コンベアと、被計量物の計量を行う第1計量センサと、第1計量センサにおける計量結果から床振動の影響を除去するための第2計量センサと、を有している。支持部材は、並列配置された複数の計量搬送機構に渡って被計量物の搬送方向に略直交する方向に延びる内部に空間を有している。そして、第2計量センサは、支持部材の内部に形成された空間に配置されている。
【0006】
ここでは、被計量物を搬送する搬送コンベアと、被計量物の計量を行う第1計量センサと、第1計量センサにおける床振動の影響を検出する第2計量センサとを含む計量搬送機構を複数並列に配置した、いわゆる多連タイプの重量検出装置において、この並列配置された複数の計量搬送機構に渡って被計量物の搬送方向に略直交する方向に延びる内部空間を有する支持部材を備えている。そして、第2計量センサは、この支持部材の内部空間に配置されている。
【0007】
ここで、第1・第2計量センサとしては、自由端側に載置された被計量物の重量によって生じる歪を電気信号に変換して計量を行うロードセルが含まれる。
これにより、互いに並列に配置された複数の計量搬送機構をつなぐように搬送方向に直交する方向に延びている支持部材の内部空間に第2計量センサを、その長手方向を搬送方向に沿って設けることで、個々の重量検出装置における搬送方向に直交する方向の長さが小さい構成であっても、確実に第2計量センサを配置するスペースを確保することができる。この結果、重量検出装置が搬送方向に直交する方向に小さい場合でも、床振動の影響を検出して高精度な計量を実施することができる。
【0008】
第2の発明に係る重量検出装置は、第1の発明に係る重量検出装置であって、第1計量センサおよび第2計量センサの少なくとも一方は、搬送コンベアによる被計量物の搬送方向に対して長手方向が平行になるように配置されている。
ここでは、第1・第2計量センサを配置する際の向きについて規定している。具体的には、各計量センサの長手方向が搬送方向に平行になるように配置される。
これにより、搬送方向に直交する方向におけるサイズが小さい重量検出装置であっても、装置からはみ出すことがないように第1・第2計量センサを配置することができるため、床振動検出用の第2検出センサを設けた場合でも装置の小型化に対応可能になる。
【0009】
第3の発明に係る重量検出装置は、第1または第2の発明に係る重量検出装置であって、計量搬送機構は、支持部材における屈曲部分の近傍に取り付けられている。
ここでは、計量搬送機構を、支持部材に含まれる屈曲部分に取り付けている。
これにより、一般的に屈曲した部分は剛性が大きくなることから、床振動の影響を受けにくくすることができる。よって、第1・第2計量センサを剛性が大きい部分に取り付けることで、床振動の影響を低減した計量を実施することができる。
【0010】
第4の発明に係る重量検出装置は、第1から第3の発明のいずれか1つに係る重量検出装置であって、第1計量センサと第2計量センサとは、同一の部材に対してそれぞれ取り付けられている。
ここでは、第1・第2計量センサを同じ部材に対して取り付けている。
これにより、床振動の影響はほぼ同じ状態で第1・第2計量センサに対して伝達されることになる。この結果、第1計量センサにおける検出結果に含まれる床振動の影響を、第2計量センサにおいて正確に検出して、高精度な計量を実施することができる。
【0011】
第5の発明に係る重量検出装置は、第1から第4の発明のいずれか1つに係る重量検出装置であって、第1計量センサおよび第2計量センサは、それぞれの取付位置が平面視における被計量物の搬送方向において重なるように配置されている。
ここでは、平面視において、第1・第2計量センサが搬送方向において重なるように配置されている。
【0012】
これにより、搬送方向に直交する方向における床面からの振動の影響をほぼ同じ状態で受けることになるため、第1計量センサにおける計量結果に含まれる床振動の影響を、正確に第2計量センサにおいて検出して、高精度な計量を実施することができる。この結果、第1計量センサに対して付与される床振動の影響を第2計量センサにおける検出結果に基づいて適切に除去することができるため、高精度な計量を行うことができる。
【0013】
第6の発明に係る重量検出装置は、第1から第5の発明のいずれか1つに係る重量検出装置であって、支持部材は、その両端が床面に立設される脚部に対して固定されている。
ここでは、第2計量センサが内部空間に取りつけられている支持部材が、重量検出装置全体を支持する脚部の部分に固定されている。
これにより、床振動の影響を第2計量センサにおいて適切に検出して、第2計量センサの近傍に配置された第1計量センサにおける計量結果から床振動の影響を排除することができる。この結果、さらに高精度な計量を実施することができる。
【発明の効果】
【0014】
本発明の重量検出装置によれば、確実に第2計量センサを配置するスペースを確保することで、重量検出装置が搬送方向に直交する方向に小さい場合でも、床振動の影響を検出して高精度な計量を実施することができる。
【発明を実施するための最良の形態】
【0015】
本発明の一実施形態に係る重量チェッカ(重量検出装置)1について、図1〜図8を用いて説明すれば以下の通りである。
なお、以下の説明で使用する「前後」方向については、図1に示す搬送方向Aの上流側を「後」側、下流側を「前」側とする。
[重量チェッカ1全体の構成]
本実施形態に係る重量チェッカ1は、図1に示すように、主に、平ベルト式のコンベア装置3と、被計量物Xの計量を行うロードセル(計量センサ、第1計量センサ)5(図3参照)と、床面の振動による影響を検出するロードセルであるAFV(Anti Floor Vibration)(第2計量センサ)6(図3参照)と、ロードセル5およびAFV6を収納する筐体7と、筐体7を固定する前後一対の脚部10,11と、AFV6を内部空間に収納するフレーム(支持部材)20(図3参照)と、を備えている。また、重量チェッカ1は、生産ラインを構成する最後部の装置として配置されており、コンベア装置3において矢印A方向に搬送しながら、例えば、図示しない製袋包装機から供給された被計量物Xの計量を行い、良品か不良品かの判定を行った後、良品と判定された被計量物Xだけを下流側に配置された図示しない金属検知機等に搬送する。
【0016】
コンベア装置3は、図1に示すように、被計量物Xの搬送方向Aにおける上流側から順に、第1搬送部3a、第2搬送部3b、第3搬送部3cを設けている。これらの第1〜第3搬送部3a〜3cは、図2に示すように、さらにそれぞれ搬送方向に対して直交する方向に並んだ3連のコンベア3aa〜3ac,3ba〜3bc,3ca〜3ccを含むように構成されている。そして、各コンベア3aa〜3ccは、前後一対のローラ13,15間に搬送用ベルトとしての無端状の搬送ベルトが巻き掛けられている。
【0017】
搬送方向Aにおける下流側のローラ13は、後述する駆動モータM1,M2(図3参照)によって回転駆動力が伝達される駆動ローラである。一方、上流側のローラ15は、駆動ローラであるローラ13からの回転駆動力が搬送ベルトを介して伝達されて回転する従動ローラである。
第1搬送部3aは、搬送方向Aにおける最上流側に配置されており、重量チェッカ1の上流側に配置された図示しない製袋包装機から送られてくる被計量物Xを受け取って搬送方向Aに向かって搬送し、第2搬送部3bに対して被計量物Xを受け渡す。
【0018】
第2搬送部3bは、第1搬送部3aと第3搬送部3cとの間に配置されており、ここで被計量物Xを搬送しながら、上記ロードセル5およびAFV6を用いて計量が行われる。なお、この第2搬送部3bにおける被計量物Xの計量については、後段にて詳述する。
第3搬送部3cは、搬送方向Aにおける最下流側に配置されており、図1に示すように、上流側の端部を中心として回動する。これにより、第2搬送部3bにおける計量結果に基づいて被計量物Xの振り分けを行う。具体的には、第2搬送部3bにおける計量結果が所定の重量範囲内である場合には、第3搬送部3cを図1に実線で示す略水平状態とし、被計量物X(良品)をそのまま下流側へと搬送する。一方、第2搬送部3bにおける計量結果が所定の重量範囲外であった場合には、図1に点線で示す斜め下方状態まで第3搬送部3cを回動させて、規定の搬送路外へと被計量物X(不良品)を搬送する。
【0019】
駆動モータM1は、図3に示すように、最上流側の3つのコンベア3aa〜3acごとにそれぞれ設けられており、各コンベア3aa〜3acの下部に配置されており、各コンベア3aa〜3acのローラ13に対して駆動ベルトを介して回転駆動力を伝達する。
駆動モータ(重量物、熱源)M2は、図4に示すように、最上流側のコンベア3aa〜3acと最下流側のコンベア3ca〜3ccの間に設けられた3つのコンベア3ba〜3bcの下部に配置されており、各コンベア3ba〜3bcのローラ13に対して駆動ベルトを介して回転駆動力を伝達する。また、駆動モータM2は、ローラ13に対して回転駆動力を伝達する際に熱を放出する熱源となる。
【0020】
ロードセル5は、図1および図3等に示すように、重量物である駆動モータM2と同じ筐体7の内部において、長手方向が搬送方向Aに沿う向きで配置されている。また、ロードセル5は、図4に示すように、駆動モータM2に隣接するように固定端(調整機構、防風壁)5bに対して取付けられており、自由端5c側に接続されたアーム部材(連結部)21を介してコンベア3ba〜3bc上に被計量物Xが載置されて生じる歪みの変化を検出して被計量物Xの計量を行う。
【0021】
固定端5bおよび自由端5cは、図4に示すように、ロードセル5の前後方向に位置している。固定端5bは、剛性が高く軽量で熱伝導率の高いアルミ合金等の材料によって形成されており、上述した一対の脚部10,11に図示しない複数の部品を介して接続されている。このため、駆動モータM2から放出される熱が固定端5bに対して伝達された場合でも、その熱を脚部10,11を介して逃がすことができる。そして、固定端5bは、ロードセル5と重量物である駆動モータM2との間に配置されていることで、駆動モータM2の駆動中に生じる風がロードセル5の方へ流れ込まないようにするための防風壁として機能する。一方、自由端5cは、固定端5bと同様に、剛性が高く軽量で熱伝導率の高いアルミ合金等の材料によって形成されており、アーム部材21を介してコンベア3ba〜3bcにそれぞれ連結されている。このため、コンベア3ba〜3bc上に被計量物Xが載置されると、ロードセル5の自由端5c側に鉛直方向下向きの荷重が掛かることで生じた歪みを検出して電気信号に変換し、この電気信号に基づいて計量を行う。
【0022】
AFV6は、図3および図4に示すように、フレーム20の内部空間において、長手方向が搬送方向Aに沿う向きで取り付けられており、床面からの振動を検出する。より詳細には、AFV6は、図8に示すように、固定用金具41,42,43にねじによって固定された後、固定用ブロック46に対して固定される。そして、この状態で、カバー部材47の内部に収納された後、フレーム20の内部空間における上面に対して吊り下げられるようにして固定される。
【0023】
フレーム20は、図3および図5に示すように、搬送方向Aに直交する方向に延伸しており、搬送方向Aに対して直交する方向に配置された3つのAFV6を内部空間に収納している。
なお、上述した駆動モータM2、ロードセル5、AFV6およびフレーム20を含む計量機構30の取付構造に関しては、後段にて詳述する。
【0024】
[計量機構30の取付構造]
計量機構30は、上述のように、第2搬送部3bのコンベア3ba〜3bc、駆動モータM2、ロードセル5(固定端5b、自由端5c)、AFV6およびフレーム20を含むように構成されている。
ここで、計量機構30に含まれるAFV6およびフレーム20を除く各部材を模式的に示した図7および上段にて説明した図3を用いて、各部材の配置について説明すれば以下の通りである。
【0025】
ロードセル5の固定端5bと自由端5cとは、図4および図7に示すように、ロードセル5の搬送方向Aにおける前端部と後端部とにそれぞれ形成されており、重量物である駆動モータM2は、その固定端5bに対して非接触の状態で固定端5bの前方に隣接するように配置されている。そして、駆動モータM2は、アーム部材21、フレーム部材(連結部)22およびアーム部材(連結部)23を介して自由端5c側に接続されている。このように、重量物である駆動モータM2を固定端5b側に配置することで、計量機構30の重心位置を、自由端5c側から固定端5bに近い側へと移動させることができる。この結果、床面につながる固定端5bの近傍に計量機構30の重心を置くことができるため、床面からの振動の影響によって計量精度が低下してしまうことを回避することができる。
【0026】
アーム部材21,23およびフレーム部材22は、固定端5bおよび自由端5cと同様に、熱伝導率の高い材料によって形成されている。このため、運転中に熱源となる駆動モータM2から放出される熱は、直接接続されたアーム部材23、フレーム部材22、アーム部材21を経由して自由端5c側へと伝達される。一方、同じく駆動モータM2から放出される熱は、非接触状態であるが隣接するように配置された固定端5bに対しては空気を介して伝達されるとともに、輻射熱としても伝達される。このとき、ロードセル5に対して、アーム部材21,23等を介して直接的に伝達される熱と、近距離から空気を介して伝達される熱とは、熱が伝達される経路長の差等によってほぼ同程度の熱となって伝達されるため、ロードセル5に対して熱が均一に伝達される。
【0027】
次に、AFV6およびフレーム20を含む計量機構30全体の配置について、上段にて説明した図2、図3、図5および図6を用いて説明すれば以下の通りである。
ロードセル5およびAFV6が取り付けられたフレーム20は、図2に示すように、上述した前後一対の脚部10,11に接続されている。このため、このフレーム20の内部空間に取り付けられたAFV6は、床面からの振動を脚部10,11を介して効果的に検出することができる。そして、ロードセル5は、図3に示すように、フレーム20の上部に固定されている。つまり、ロードセル5とAFV6とは、共通の部材(フレーム20)の天板の表裏面にそれぞれ取り付けられている。これにより、ロードセル5に伝達される床面の振動をAFV6において正確に検出することができる。この結果、AFV6における検出結果をロードセル5の重量値から差し引くことで、高精度な計量を実施することができる。また、このときロードセル5およびAFV6を含む計量機構は、フレーム20の屈曲部分の近傍に取付けられている。これにより、比較的重量が大きい計量機構を剛性が高いフレーム20の部分に対して取り付けることができる。
【0028】
さらに、ロードセル5およびAFV6のフレーム20に対する取付位置は、図5および図6に示すように、平面視において搬送方向Aに沿った同一直線L1,L2,L3上に配置される。換言すれば、搬送方向Aにおける前方から見て、ロードセル5およびAFV6のフレーム20に対する取付位置が同一の鉛直線上になるように取付けられる。これにより、搬送方向Aに直交する方向における振動を、ロードセル5およびAFV6において同じ条件下で検出することができるため、高精度な計量を実施することが可能になる。
【0029】
[重量チェッカ1の特徴]
(1)
本実施形態の重量チェッカ1では、図2に示すように、被計量物Xの搬送方向Aに直交する方向に複数のコンベア3ba〜3bcを並列配置している。各コンベア3ba〜3bcは、図3に示すように、被計量物Xの計量を行うロードセル5と、ロードセル5が計量中に床面から受けた振動の影響を検出してこれを排除するAFV6とを搭載している。そして、AFV6は、並列配置された複数のコンベア3ba〜3bcにまたがるようにして搬送方向Aに直交する方向に延びるフレーム20の内部空間に収納されている。
【0030】
このように、被計量物Xの搬送方向Aに直交する方向に延びるフレーム20の内部空間にAFV6を配置することで、ロードセル5の固定端5bに対してAFV6を取り付けられないような小型の重量チェッカ1であっても、AFV6の設置スペースを確実に確保することができる。特に、例えば、スティックシュガー等の細長い物品を搬送する幅方向に狭いコンベア3ba〜3bcの場合には、AFV6を設置するスペースを確保することはさらに困難になるが、上記のような内部に空間を有するフレーム20を搬送方向に直交する方向に沿って配置することで、容易にAFV6の設置スペースを確保することができる。この結果、小型の重量チェッカであっても、AFV6を搭載して床面からの振動の影響を検出してロードセル5の検出結果から排除することで、高精度な計量を実施することができる。
【0031】
(2)
本実施形態の重量チェッカ1では、図6〜図8に示すように、ロードセル5およびAFV6を、その長手方向が搬送方向Aに沿うように配置している。
これにより、搬送方向Aに直交する方向におけるロードセル5およびAFV6のサイズを最小限とすることができる。よって、本実施形態のように、幅の狭いタイプのコンベア3ba〜3bcを複数並列配置した重量チェッカ1にも搭載することが可能になる。
【0032】
(3)
本実施形態の重量チェッカ1では、図5に示すように、ロードセル5およびAFV6を含む計量機構30が、フレーム20の屈曲部分の近傍に取り付けられている(ロードセル5の取付位置5a参照)。
これにより、フレーム20における剛性が高い部分の近傍に重量物である計量機構30を取り付けることで、ロードセル5やAFV6において安定した状態で計量および床面からの振動検出を行うことができる。
【0033】
(4)
本実施形態の重量チェッカ1では、図3等に示すように、ロードセル5とAFV6とは、共通の部材であるフレーム20における天板の表裏面に対して取り付けられている。
これにより、ロードセル5において検出される床面からの振動の影響を、AFV6においてほぼ同じ条件で検出することができる。よって、ロードセル5における計量結果から床面からの振動の影響を適切に除去して、高精度な計量を実施することができる。
【0034】
(5)
本実施形態の重量チェッカ1では、図5および図6に示すように、ロードセル5およびAFV6の取付位置が、搬送方向Aからみた正面視において、鉛直線上に並ぶように配置している。
これにより、AFV6において、被計量物Xの搬送方向Aに直交する方向における振動の影響をロードセル5とほぼ同じ条件で検出できるため、ロードセル5における計量結果からAFV6における検出結果を差し引くことで、より高精度な計量を実施することができる。
【0035】
(6)
本実施形態の重量チェッカ1では、図2に示すように、AFV6を内部に収納するフレーム20が、前後一対の脚部10,11に対して接続されている。
これにより、AFV6において床面からの振動の影響を適切に検出して、同じくフレーム20に対して取り付けられたロードセル5における計量結果から床振動の影響を排除することができる。この結果、さらに高精度な計量を実施することができる。
【0036】
[他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
(A)
上記実施形態では、第1計量センサとして、ロードセル5を用いた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0037】
例えば、第1計量センサとして、ロードセルの替わりにフォースバランスを計量センサとして用いてもよい。
この場合には、被計量物を計量位置に載せた際に生じるフォースバランスにおける差動トランスによって発生する電流値を検出することで、フォースバランスの特性により、ロードセルを計量センサとして用いた場合よりもさらに高精度な計量を実施することができる。
【0038】
また、第2計量センサ(AFV)についても同様である。
(B)
上記実施形態では、AFV6を内部に収納するフレーム20として、断面が長方形のパイプ状の部材を用いた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0039】
例えば、断面が円形、楕円形、多角形のパイプ状の支持部材を用いることもできる。
(C)
上記実施形態では、3つのコンベア3ba〜3bcが並列配置された多連型のコンベア装置3を用いた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
例えば、1つあるいは2つのコンベアが並列配置された構成であってもよいし、4つ以上のコンベアが並列配置された構成であってもよい。
【0040】
(D)
上記実施形態では、ロードセル5を、AFV6が取り付けられているフレーム20に対して取り付けた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
例えば、ロードセル5の取付け部材としてはフレーム以外の部材であってもよい。
ただし、上記実施形態のように、AFV6と共通の部材にロードセル5も取り付けることで、ロードセル5に伝達される各種振動をAFV6においてほぼ共通の条件において検出することができるため、より高精度な計量を行うという観点からは上記実施形態のようにすることがより好ましい。
【0041】
(E)
上記実施形態では、本発明を重量チェッカ1に対して適用した例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
例えば、重量チェッカ以外にも、計量ホッパや各種計量センサ等を搭載して第1・第2計量センサによって計量を行う重量検査装置に対して本発明を適用することもできる。この場合でも、床面からの振動による悪影響を低減して、常に高精度な計量を実施することができる。
【産業上の利用可能性】
【0042】
本発明の重量検出装置は、確実に第2計量センサを配置するスペースを確保することがで、重量検出装置が搬送方向に直交する方向に小さい場合でも、床振動の影響を検出して高精度な計量を実施することができるという効果を奏することから、床振動の影響を排除するための計量センサを搭載した各種計量装置に対して広く適用可能である。
【図面の簡単な説明】
【0043】
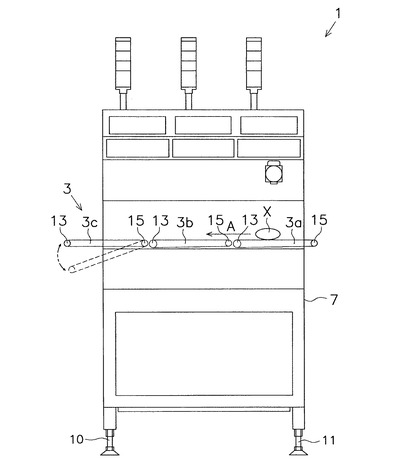
【図1】本発明の一実施形態に係る重量チェッカの外観を示す正面図。
【図2】図1の重量チェッカを示す平面図。
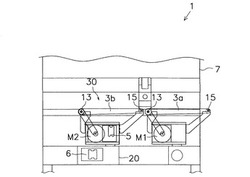
【図3】図1の重量チェッカに含まれる計量機構周辺の構造を示す拡大図。
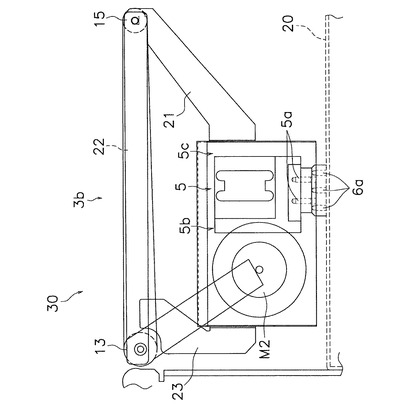
【図4】図3の計量機構の部分をさらに拡大した図。
【図5】図4の計量機構の取付位置を示す平面図。
【図6】図4の計量機構を搬送方向からみた図。
【図7】図4の計量機構の取付構造を模式的に示した図。
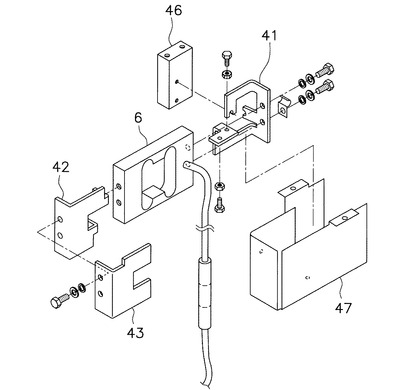
【図8】図4の計量機構に含まれるロードセルの吊り下げ取付構造を示す斜視図。
【符号の説明】
【0044】
1 重量チェッカ(重量検出装置)
3 コンベア装置
3a 第1搬送部
3b 第2搬送部
3c 第3搬送部
3aa〜3ac コンベア
3ba〜3bc コンベア
3ca〜3cc コンベア
5 ロードセル(計量センサ、第1計量センサ)
5a 取付位置
5b 固定端(調整機構、防風壁)
5c 自由端
6 AFV(ロードセル、第2計量センサ)
6a 取付位置
7 筐体
10,11 脚部
13 ローラ(駆動ローラ)
15 ローラ(従動ローラ)
20 フレーム(支持部材)
21 アーム部材(連結部)
22 フレーム部材(連結部)
23 アーム部材(連結部)
30 計量機構
M1 駆動モータ
M2 駆動モータ(重量物、熱源)
M53 重量物
X 被計量物
【技術分野】
【0001】
本発明は、床面における振動の影響を除去するために振動検出用のロードセル等の検出センサを備えた重量検出装置に関する。
【背景技術】
【0002】
近年、被計量物を搬送しながらその計量を行う重量検出装置において、床面からの振動の影響を除去するために、被計量物の計量を行う第1計量センサ(ロードセル)の近傍に、床振動成分を検出する第2計量センサ(ロードセル)を別途設けた装置が提供されている。
例えば、特許文献1には、床面と接触する柱部分における第1計量センサの反対側に床振動検出用の第2計量センサを取り付けた重量検出装置が開示されている。これによれば、装置据付側および物品載置側からの振動外乱の影響を除去して検出精度の向上を図ることが可能になる。
【特許文献1】特開2004−309148号公報(平成15年11月4日公開)
【特許文献2】特開2002−039845号公報(平成14年2月6日公開)
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記従来の重量検出装置では、以下に示すような問題点を有している。
すなわち、上記公報に開示された重量検出装置では、被計量物の大きさについては特に考慮されていないが、実際の計量では、例えば、スティックシュガーのような細くて小さいものを計量することも考えられる。このような小さい被計量物は、一般的に、上流側に配置された包装機等から排出される際に5〜6個が同時に搬送コンベア上に排出されるため、単位時間当たりの処理量が非常に多くなることから、計量精度が低下しないように搬送コンベアの幅および装置自身の大きさを小さく設計する必要がある。
【0004】
しかし、上記公報に開示された重量検出装置では、装置の大きさに制限があったり、搬送コンベアの幅を狭くしたりする場合には、床振動検出用の第2計量センサを取り付けるスペースが確保できなくなる場合がある。
本発明の課題は、スペース的な余裕がない場合でも、床振動検出用の計量センサを搭載することが可能な重量検出装置を提供することにある。
【課題を解決するための手段】
【0005】
第1の発明に係る重量検出装置は、被計量物を搬送しながら計量を行う重量検出装置であって、互いに並列配置された複数の計量搬送機構と、支持部材と、を備えている。複数の計量搬送機構のそれぞれは、被計量物を搬送する搬送コンベアと、被計量物の計量を行う第1計量センサと、第1計量センサにおける計量結果から床振動の影響を除去するための第2計量センサと、を有している。支持部材は、並列配置された複数の計量搬送機構に渡って被計量物の搬送方向に略直交する方向に延びる内部に空間を有している。そして、第2計量センサは、支持部材の内部に形成された空間に配置されている。
【0006】
ここでは、被計量物を搬送する搬送コンベアと、被計量物の計量を行う第1計量センサと、第1計量センサにおける床振動の影響を検出する第2計量センサとを含む計量搬送機構を複数並列に配置した、いわゆる多連タイプの重量検出装置において、この並列配置された複数の計量搬送機構に渡って被計量物の搬送方向に略直交する方向に延びる内部空間を有する支持部材を備えている。そして、第2計量センサは、この支持部材の内部空間に配置されている。
【0007】
ここで、第1・第2計量センサとしては、自由端側に載置された被計量物の重量によって生じる歪を電気信号に変換して計量を行うロードセルが含まれる。
これにより、互いに並列に配置された複数の計量搬送機構をつなぐように搬送方向に直交する方向に延びている支持部材の内部空間に第2計量センサを、その長手方向を搬送方向に沿って設けることで、個々の重量検出装置における搬送方向に直交する方向の長さが小さい構成であっても、確実に第2計量センサを配置するスペースを確保することができる。この結果、重量検出装置が搬送方向に直交する方向に小さい場合でも、床振動の影響を検出して高精度な計量を実施することができる。
【0008】
第2の発明に係る重量検出装置は、第1の発明に係る重量検出装置であって、第1計量センサおよび第2計量センサの少なくとも一方は、搬送コンベアによる被計量物の搬送方向に対して長手方向が平行になるように配置されている。
ここでは、第1・第2計量センサを配置する際の向きについて規定している。具体的には、各計量センサの長手方向が搬送方向に平行になるように配置される。
これにより、搬送方向に直交する方向におけるサイズが小さい重量検出装置であっても、装置からはみ出すことがないように第1・第2計量センサを配置することができるため、床振動検出用の第2検出センサを設けた場合でも装置の小型化に対応可能になる。
【0009】
第3の発明に係る重量検出装置は、第1または第2の発明に係る重量検出装置であって、計量搬送機構は、支持部材における屈曲部分の近傍に取り付けられている。
ここでは、計量搬送機構を、支持部材に含まれる屈曲部分に取り付けている。
これにより、一般的に屈曲した部分は剛性が大きくなることから、床振動の影響を受けにくくすることができる。よって、第1・第2計量センサを剛性が大きい部分に取り付けることで、床振動の影響を低減した計量を実施することができる。
【0010】
第4の発明に係る重量検出装置は、第1から第3の発明のいずれか1つに係る重量検出装置であって、第1計量センサと第2計量センサとは、同一の部材に対してそれぞれ取り付けられている。
ここでは、第1・第2計量センサを同じ部材に対して取り付けている。
これにより、床振動の影響はほぼ同じ状態で第1・第2計量センサに対して伝達されることになる。この結果、第1計量センサにおける検出結果に含まれる床振動の影響を、第2計量センサにおいて正確に検出して、高精度な計量を実施することができる。
【0011】
第5の発明に係る重量検出装置は、第1から第4の発明のいずれか1つに係る重量検出装置であって、第1計量センサおよび第2計量センサは、それぞれの取付位置が平面視における被計量物の搬送方向において重なるように配置されている。
ここでは、平面視において、第1・第2計量センサが搬送方向において重なるように配置されている。
【0012】
これにより、搬送方向に直交する方向における床面からの振動の影響をほぼ同じ状態で受けることになるため、第1計量センサにおける計量結果に含まれる床振動の影響を、正確に第2計量センサにおいて検出して、高精度な計量を実施することができる。この結果、第1計量センサに対して付与される床振動の影響を第2計量センサにおける検出結果に基づいて適切に除去することができるため、高精度な計量を行うことができる。
【0013】
第6の発明に係る重量検出装置は、第1から第5の発明のいずれか1つに係る重量検出装置であって、支持部材は、その両端が床面に立設される脚部に対して固定されている。
ここでは、第2計量センサが内部空間に取りつけられている支持部材が、重量検出装置全体を支持する脚部の部分に固定されている。
これにより、床振動の影響を第2計量センサにおいて適切に検出して、第2計量センサの近傍に配置された第1計量センサにおける計量結果から床振動の影響を排除することができる。この結果、さらに高精度な計量を実施することができる。
【発明の効果】
【0014】
本発明の重量検出装置によれば、確実に第2計量センサを配置するスペースを確保することで、重量検出装置が搬送方向に直交する方向に小さい場合でも、床振動の影響を検出して高精度な計量を実施することができる。
【発明を実施するための最良の形態】
【0015】
本発明の一実施形態に係る重量チェッカ(重量検出装置)1について、図1〜図8を用いて説明すれば以下の通りである。
なお、以下の説明で使用する「前後」方向については、図1に示す搬送方向Aの上流側を「後」側、下流側を「前」側とする。
[重量チェッカ1全体の構成]
本実施形態に係る重量チェッカ1は、図1に示すように、主に、平ベルト式のコンベア装置3と、被計量物Xの計量を行うロードセル(計量センサ、第1計量センサ)5(図3参照)と、床面の振動による影響を検出するロードセルであるAFV(Anti Floor Vibration)(第2計量センサ)6(図3参照)と、ロードセル5およびAFV6を収納する筐体7と、筐体7を固定する前後一対の脚部10,11と、AFV6を内部空間に収納するフレーム(支持部材)20(図3参照)と、を備えている。また、重量チェッカ1は、生産ラインを構成する最後部の装置として配置されており、コンベア装置3において矢印A方向に搬送しながら、例えば、図示しない製袋包装機から供給された被計量物Xの計量を行い、良品か不良品かの判定を行った後、良品と判定された被計量物Xだけを下流側に配置された図示しない金属検知機等に搬送する。
【0016】
コンベア装置3は、図1に示すように、被計量物Xの搬送方向Aにおける上流側から順に、第1搬送部3a、第2搬送部3b、第3搬送部3cを設けている。これらの第1〜第3搬送部3a〜3cは、図2に示すように、さらにそれぞれ搬送方向に対して直交する方向に並んだ3連のコンベア3aa〜3ac,3ba〜3bc,3ca〜3ccを含むように構成されている。そして、各コンベア3aa〜3ccは、前後一対のローラ13,15間に搬送用ベルトとしての無端状の搬送ベルトが巻き掛けられている。
【0017】
搬送方向Aにおける下流側のローラ13は、後述する駆動モータM1,M2(図3参照)によって回転駆動力が伝達される駆動ローラである。一方、上流側のローラ15は、駆動ローラであるローラ13からの回転駆動力が搬送ベルトを介して伝達されて回転する従動ローラである。
第1搬送部3aは、搬送方向Aにおける最上流側に配置されており、重量チェッカ1の上流側に配置された図示しない製袋包装機から送られてくる被計量物Xを受け取って搬送方向Aに向かって搬送し、第2搬送部3bに対して被計量物Xを受け渡す。
【0018】
第2搬送部3bは、第1搬送部3aと第3搬送部3cとの間に配置されており、ここで被計量物Xを搬送しながら、上記ロードセル5およびAFV6を用いて計量が行われる。なお、この第2搬送部3bにおける被計量物Xの計量については、後段にて詳述する。
第3搬送部3cは、搬送方向Aにおける最下流側に配置されており、図1に示すように、上流側の端部を中心として回動する。これにより、第2搬送部3bにおける計量結果に基づいて被計量物Xの振り分けを行う。具体的には、第2搬送部3bにおける計量結果が所定の重量範囲内である場合には、第3搬送部3cを図1に実線で示す略水平状態とし、被計量物X(良品)をそのまま下流側へと搬送する。一方、第2搬送部3bにおける計量結果が所定の重量範囲外であった場合には、図1に点線で示す斜め下方状態まで第3搬送部3cを回動させて、規定の搬送路外へと被計量物X(不良品)を搬送する。
【0019】
駆動モータM1は、図3に示すように、最上流側の3つのコンベア3aa〜3acごとにそれぞれ設けられており、各コンベア3aa〜3acの下部に配置されており、各コンベア3aa〜3acのローラ13に対して駆動ベルトを介して回転駆動力を伝達する。
駆動モータ(重量物、熱源)M2は、図4に示すように、最上流側のコンベア3aa〜3acと最下流側のコンベア3ca〜3ccの間に設けられた3つのコンベア3ba〜3bcの下部に配置されており、各コンベア3ba〜3bcのローラ13に対して駆動ベルトを介して回転駆動力を伝達する。また、駆動モータM2は、ローラ13に対して回転駆動力を伝達する際に熱を放出する熱源となる。
【0020】
ロードセル5は、図1および図3等に示すように、重量物である駆動モータM2と同じ筐体7の内部において、長手方向が搬送方向Aに沿う向きで配置されている。また、ロードセル5は、図4に示すように、駆動モータM2に隣接するように固定端(調整機構、防風壁)5bに対して取付けられており、自由端5c側に接続されたアーム部材(連結部)21を介してコンベア3ba〜3bc上に被計量物Xが載置されて生じる歪みの変化を検出して被計量物Xの計量を行う。
【0021】
固定端5bおよび自由端5cは、図4に示すように、ロードセル5の前後方向に位置している。固定端5bは、剛性が高く軽量で熱伝導率の高いアルミ合金等の材料によって形成されており、上述した一対の脚部10,11に図示しない複数の部品を介して接続されている。このため、駆動モータM2から放出される熱が固定端5bに対して伝達された場合でも、その熱を脚部10,11を介して逃がすことができる。そして、固定端5bは、ロードセル5と重量物である駆動モータM2との間に配置されていることで、駆動モータM2の駆動中に生じる風がロードセル5の方へ流れ込まないようにするための防風壁として機能する。一方、自由端5cは、固定端5bと同様に、剛性が高く軽量で熱伝導率の高いアルミ合金等の材料によって形成されており、アーム部材21を介してコンベア3ba〜3bcにそれぞれ連結されている。このため、コンベア3ba〜3bc上に被計量物Xが載置されると、ロードセル5の自由端5c側に鉛直方向下向きの荷重が掛かることで生じた歪みを検出して電気信号に変換し、この電気信号に基づいて計量を行う。
【0022】
AFV6は、図3および図4に示すように、フレーム20の内部空間において、長手方向が搬送方向Aに沿う向きで取り付けられており、床面からの振動を検出する。より詳細には、AFV6は、図8に示すように、固定用金具41,42,43にねじによって固定された後、固定用ブロック46に対して固定される。そして、この状態で、カバー部材47の内部に収納された後、フレーム20の内部空間における上面に対して吊り下げられるようにして固定される。
【0023】
フレーム20は、図3および図5に示すように、搬送方向Aに直交する方向に延伸しており、搬送方向Aに対して直交する方向に配置された3つのAFV6を内部空間に収納している。
なお、上述した駆動モータM2、ロードセル5、AFV6およびフレーム20を含む計量機構30の取付構造に関しては、後段にて詳述する。
【0024】
[計量機構30の取付構造]
計量機構30は、上述のように、第2搬送部3bのコンベア3ba〜3bc、駆動モータM2、ロードセル5(固定端5b、自由端5c)、AFV6およびフレーム20を含むように構成されている。
ここで、計量機構30に含まれるAFV6およびフレーム20を除く各部材を模式的に示した図7および上段にて説明した図3を用いて、各部材の配置について説明すれば以下の通りである。
【0025】
ロードセル5の固定端5bと自由端5cとは、図4および図7に示すように、ロードセル5の搬送方向Aにおける前端部と後端部とにそれぞれ形成されており、重量物である駆動モータM2は、その固定端5bに対して非接触の状態で固定端5bの前方に隣接するように配置されている。そして、駆動モータM2は、アーム部材21、フレーム部材(連結部)22およびアーム部材(連結部)23を介して自由端5c側に接続されている。このように、重量物である駆動モータM2を固定端5b側に配置することで、計量機構30の重心位置を、自由端5c側から固定端5bに近い側へと移動させることができる。この結果、床面につながる固定端5bの近傍に計量機構30の重心を置くことができるため、床面からの振動の影響によって計量精度が低下してしまうことを回避することができる。
【0026】
アーム部材21,23およびフレーム部材22は、固定端5bおよび自由端5cと同様に、熱伝導率の高い材料によって形成されている。このため、運転中に熱源となる駆動モータM2から放出される熱は、直接接続されたアーム部材23、フレーム部材22、アーム部材21を経由して自由端5c側へと伝達される。一方、同じく駆動モータM2から放出される熱は、非接触状態であるが隣接するように配置された固定端5bに対しては空気を介して伝達されるとともに、輻射熱としても伝達される。このとき、ロードセル5に対して、アーム部材21,23等を介して直接的に伝達される熱と、近距離から空気を介して伝達される熱とは、熱が伝達される経路長の差等によってほぼ同程度の熱となって伝達されるため、ロードセル5に対して熱が均一に伝達される。
【0027】
次に、AFV6およびフレーム20を含む計量機構30全体の配置について、上段にて説明した図2、図3、図5および図6を用いて説明すれば以下の通りである。
ロードセル5およびAFV6が取り付けられたフレーム20は、図2に示すように、上述した前後一対の脚部10,11に接続されている。このため、このフレーム20の内部空間に取り付けられたAFV6は、床面からの振動を脚部10,11を介して効果的に検出することができる。そして、ロードセル5は、図3に示すように、フレーム20の上部に固定されている。つまり、ロードセル5とAFV6とは、共通の部材(フレーム20)の天板の表裏面にそれぞれ取り付けられている。これにより、ロードセル5に伝達される床面の振動をAFV6において正確に検出することができる。この結果、AFV6における検出結果をロードセル5の重量値から差し引くことで、高精度な計量を実施することができる。また、このときロードセル5およびAFV6を含む計量機構は、フレーム20の屈曲部分の近傍に取付けられている。これにより、比較的重量が大きい計量機構を剛性が高いフレーム20の部分に対して取り付けることができる。
【0028】
さらに、ロードセル5およびAFV6のフレーム20に対する取付位置は、図5および図6に示すように、平面視において搬送方向Aに沿った同一直線L1,L2,L3上に配置される。換言すれば、搬送方向Aにおける前方から見て、ロードセル5およびAFV6のフレーム20に対する取付位置が同一の鉛直線上になるように取付けられる。これにより、搬送方向Aに直交する方向における振動を、ロードセル5およびAFV6において同じ条件下で検出することができるため、高精度な計量を実施することが可能になる。
【0029】
[重量チェッカ1の特徴]
(1)
本実施形態の重量チェッカ1では、図2に示すように、被計量物Xの搬送方向Aに直交する方向に複数のコンベア3ba〜3bcを並列配置している。各コンベア3ba〜3bcは、図3に示すように、被計量物Xの計量を行うロードセル5と、ロードセル5が計量中に床面から受けた振動の影響を検出してこれを排除するAFV6とを搭載している。そして、AFV6は、並列配置された複数のコンベア3ba〜3bcにまたがるようにして搬送方向Aに直交する方向に延びるフレーム20の内部空間に収納されている。
【0030】
このように、被計量物Xの搬送方向Aに直交する方向に延びるフレーム20の内部空間にAFV6を配置することで、ロードセル5の固定端5bに対してAFV6を取り付けられないような小型の重量チェッカ1であっても、AFV6の設置スペースを確実に確保することができる。特に、例えば、スティックシュガー等の細長い物品を搬送する幅方向に狭いコンベア3ba〜3bcの場合には、AFV6を設置するスペースを確保することはさらに困難になるが、上記のような内部に空間を有するフレーム20を搬送方向に直交する方向に沿って配置することで、容易にAFV6の設置スペースを確保することができる。この結果、小型の重量チェッカであっても、AFV6を搭載して床面からの振動の影響を検出してロードセル5の検出結果から排除することで、高精度な計量を実施することができる。
【0031】
(2)
本実施形態の重量チェッカ1では、図6〜図8に示すように、ロードセル5およびAFV6を、その長手方向が搬送方向Aに沿うように配置している。
これにより、搬送方向Aに直交する方向におけるロードセル5およびAFV6のサイズを最小限とすることができる。よって、本実施形態のように、幅の狭いタイプのコンベア3ba〜3bcを複数並列配置した重量チェッカ1にも搭載することが可能になる。
【0032】
(3)
本実施形態の重量チェッカ1では、図5に示すように、ロードセル5およびAFV6を含む計量機構30が、フレーム20の屈曲部分の近傍に取り付けられている(ロードセル5の取付位置5a参照)。
これにより、フレーム20における剛性が高い部分の近傍に重量物である計量機構30を取り付けることで、ロードセル5やAFV6において安定した状態で計量および床面からの振動検出を行うことができる。
【0033】
(4)
本実施形態の重量チェッカ1では、図3等に示すように、ロードセル5とAFV6とは、共通の部材であるフレーム20における天板の表裏面に対して取り付けられている。
これにより、ロードセル5において検出される床面からの振動の影響を、AFV6においてほぼ同じ条件で検出することができる。よって、ロードセル5における計量結果から床面からの振動の影響を適切に除去して、高精度な計量を実施することができる。
【0034】
(5)
本実施形態の重量チェッカ1では、図5および図6に示すように、ロードセル5およびAFV6の取付位置が、搬送方向Aからみた正面視において、鉛直線上に並ぶように配置している。
これにより、AFV6において、被計量物Xの搬送方向Aに直交する方向における振動の影響をロードセル5とほぼ同じ条件で検出できるため、ロードセル5における計量結果からAFV6における検出結果を差し引くことで、より高精度な計量を実施することができる。
【0035】
(6)
本実施形態の重量チェッカ1では、図2に示すように、AFV6を内部に収納するフレーム20が、前後一対の脚部10,11に対して接続されている。
これにより、AFV6において床面からの振動の影響を適切に検出して、同じくフレーム20に対して取り付けられたロードセル5における計量結果から床振動の影響を排除することができる。この結果、さらに高精度な計量を実施することができる。
【0036】
[他の実施形態]
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
(A)
上記実施形態では、第1計量センサとして、ロードセル5を用いた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0037】
例えば、第1計量センサとして、ロードセルの替わりにフォースバランスを計量センサとして用いてもよい。
この場合には、被計量物を計量位置に載せた際に生じるフォースバランスにおける差動トランスによって発生する電流値を検出することで、フォースバランスの特性により、ロードセルを計量センサとして用いた場合よりもさらに高精度な計量を実施することができる。
【0038】
また、第2計量センサ(AFV)についても同様である。
(B)
上記実施形態では、AFV6を内部に収納するフレーム20として、断面が長方形のパイプ状の部材を用いた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
【0039】
例えば、断面が円形、楕円形、多角形のパイプ状の支持部材を用いることもできる。
(C)
上記実施形態では、3つのコンベア3ba〜3bcが並列配置された多連型のコンベア装置3を用いた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
例えば、1つあるいは2つのコンベアが並列配置された構成であってもよいし、4つ以上のコンベアが並列配置された構成であってもよい。
【0040】
(D)
上記実施形態では、ロードセル5を、AFV6が取り付けられているフレーム20に対して取り付けた例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
例えば、ロードセル5の取付け部材としてはフレーム以外の部材であってもよい。
ただし、上記実施形態のように、AFV6と共通の部材にロードセル5も取り付けることで、ロードセル5に伝達される各種振動をAFV6においてほぼ共通の条件において検出することができるため、より高精度な計量を行うという観点からは上記実施形態のようにすることがより好ましい。
【0041】
(E)
上記実施形態では、本発明を重量チェッカ1に対して適用した例を挙げて説明した。しかし、本発明はこれに限定されるものではない。
例えば、重量チェッカ以外にも、計量ホッパや各種計量センサ等を搭載して第1・第2計量センサによって計量を行う重量検査装置に対して本発明を適用することもできる。この場合でも、床面からの振動による悪影響を低減して、常に高精度な計量を実施することができる。
【産業上の利用可能性】
【0042】
本発明の重量検出装置は、確実に第2計量センサを配置するスペースを確保することがで、重量検出装置が搬送方向に直交する方向に小さい場合でも、床振動の影響を検出して高精度な計量を実施することができるという効果を奏することから、床振動の影響を排除するための計量センサを搭載した各種計量装置に対して広く適用可能である。
【図面の簡単な説明】
【0043】
【図1】本発明の一実施形態に係る重量チェッカの外観を示す正面図。
【図2】図1の重量チェッカを示す平面図。
【図3】図1の重量チェッカに含まれる計量機構周辺の構造を示す拡大図。
【図4】図3の計量機構の部分をさらに拡大した図。
【図5】図4の計量機構の取付位置を示す平面図。
【図6】図4の計量機構を搬送方向からみた図。
【図7】図4の計量機構の取付構造を模式的に示した図。
【図8】図4の計量機構に含まれるロードセルの吊り下げ取付構造を示す斜視図。
【符号の説明】
【0044】
1 重量チェッカ(重量検出装置)
3 コンベア装置
3a 第1搬送部
3b 第2搬送部
3c 第3搬送部
3aa〜3ac コンベア
3ba〜3bc コンベア
3ca〜3cc コンベア
5 ロードセル(計量センサ、第1計量センサ)
5a 取付位置
5b 固定端(調整機構、防風壁)
5c 自由端
6 AFV(ロードセル、第2計量センサ)
6a 取付位置
7 筐体
10,11 脚部
13 ローラ(駆動ローラ)
15 ローラ(従動ローラ)
20 フレーム(支持部材)
21 アーム部材(連結部)
22 フレーム部材(連結部)
23 アーム部材(連結部)
30 計量機構
M1 駆動モータ
M2 駆動モータ(重量物、熱源)
M53 重量物
X 被計量物
【特許請求の範囲】
【請求項1】
被計量物を搬送しながら計量を行う重量検出装置であって、
前記被計量物を搬送する搬送コンベアと、前記被計量物の計量を行う第1計量センサと、前記第1計量センサにおける計量結果から床振動の影響を除去するための第2計量センサと、を有しており、並列配置された複数の計量搬送機構と、
並列配置された複数の前記計量搬送機構に渡って前記被計量物の搬送方向に略直交する方向に延びる内部に空間を有する支持部材と、を備えており、
前記第2計量センサは、前記支持部材の内部に形成された空間に配置されている、
重量検出装置。
【請求項2】
前記第1計量センサおよび前記第2計量センサの少なくとも一方は、前記搬送コンベアによる前記被計量物の搬送方向に対して長手方向が平行になるように配置されている、
請求項1に記載の重量検出装置。
【請求項3】
前記計量搬送機構は、前記支持部材における屈曲部分の近傍に取り付けられている、
請求項1または2に記載の重量検出装置。
【請求項4】
前記第1計量センサと前記第2計量センサとは、同一の部材に対してそれぞれ取り付けられている、
請求項1から3のいずれか1項に記載の重量検出装置。
【請求項5】
前記第1計量センサおよび前記第2計量センサは、それぞれの取付位置が平面視における前記被計量物の搬送方向において重なるように配置されている、
請求項1から4のいずれか1項に記載の重量検出装置。
【請求項6】
前記支持部材は、その両端が床面に立設される脚部に対して固定されている、
請求項1から5のいずれか1項に記載の重量検出装置。
【請求項1】
被計量物を搬送しながら計量を行う重量検出装置であって、
前記被計量物を搬送する搬送コンベアと、前記被計量物の計量を行う第1計量センサと、前記第1計量センサにおける計量結果から床振動の影響を除去するための第2計量センサと、を有しており、並列配置された複数の計量搬送機構と、
並列配置された複数の前記計量搬送機構に渡って前記被計量物の搬送方向に略直交する方向に延びる内部に空間を有する支持部材と、を備えており、
前記第2計量センサは、前記支持部材の内部に形成された空間に配置されている、
重量検出装置。
【請求項2】
前記第1計量センサおよび前記第2計量センサの少なくとも一方は、前記搬送コンベアによる前記被計量物の搬送方向に対して長手方向が平行になるように配置されている、
請求項1に記載の重量検出装置。
【請求項3】
前記計量搬送機構は、前記支持部材における屈曲部分の近傍に取り付けられている、
請求項1または2に記載の重量検出装置。
【請求項4】
前記第1計量センサと前記第2計量センサとは、同一の部材に対してそれぞれ取り付けられている、
請求項1から3のいずれか1項に記載の重量検出装置。
【請求項5】
前記第1計量センサおよび前記第2計量センサは、それぞれの取付位置が平面視における前記被計量物の搬送方向において重なるように配置されている、
請求項1から4のいずれか1項に記載の重量検出装置。
【請求項6】
前記支持部材は、その両端が床面に立設される脚部に対して固定されている、
請求項1から5のいずれか1項に記載の重量検出装置。
【図1】


【図2】

【図3】

【図4】
【図5】

【図6】

【図7】

【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−101463(P2007−101463A)
【公開日】平成19年4月19日(2007.4.19)
【国際特許分類】
【出願番号】特願2005−294300(P2005−294300)
【出願日】平成17年10月7日(2005.10.7)
【出願人】(000147833)株式会社イシダ (859)
【公開日】平成19年4月19日(2007.4.19)
【国際特許分類】
【出願日】平成17年10月7日(2005.10.7)
【出願人】(000147833)株式会社イシダ (859)
[ Back to top ]