
株式会社安川電機により出願された特許
1,101 - 1,110 / 2,482
採水管の採水構造
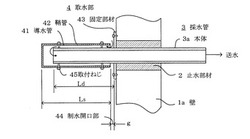
【課題】 夾雑物の付着がなく、ガスの流入や発生を防ぎ、スムーズな採水ができる採水管を提供する。
【解決手段】 本発明の採水管3は、汚水の汚水槽から取水する取水部4と、取水部から取水した汚水を調整槽に送水する本体管3aとを有したもので、取水部は、本体管から延長した導水管41に一方端が閉じた鞘管42を装着し、かつ鞘管の開口端と導水管41に対して略直角方向にある固定部材43との間に汚水を流入させる制水開口部44を設けたものである。
(もっと読む)
組み立て作業ロボットの制御方法および制御装置

【課題】挿入動作の無駄な探索を無くし、探索時間を短縮できるようにする。
【解決手段】ワークを対象物に押し当てながらワークの位置を移動させる処理と、ワークを対象物へ挿入する挿入位置を探索する処理と、ワークを対象物へ挿入する処理と、ワークを対象物へ挿入完了したことを判断する処理とを備えた組み立て作業ロボットの制御方法において、探索動作開始時にワークを対象物に押し付けて(S102)、ロボットに取り付けた力・モーメントセンサが検出するモーメントの値から挿入中心位置の探索方向を決定して(S103〜S105)、探索動作を開始するようにする。
(もっと読む)
過負荷検出機構及びそれを備えた産業用ロボット
【課題】可動部の回転軸にかかる過負荷を直接検出する過負荷検出機構を提供する。
【解決手段】テーパ形状の歯車で互いにかみ合う第一および第二の歯車(1)(2)と、第一の歯車(1)が周囲に嵌合されるとともに、第一の歯車(1)を軸方向に摺動可能に保持して、第一の歯車(1)とともに回転する回転軸(3)と、第一と第二の歯車のバックラッシを除去するよう第一の歯車(1)を軸方向に沿って第二の歯車(2)の方へ付勢する付勢手段(5)と、第一の歯車(1)の外周に保持された軸受(7)と、軸受(7)の外周に保持された移動板(8)と、移動板(8)の軸方向に沿った移動を検出可能なセンサ(9)と、を備える。
(もっと読む)
電力変換装置およびその電流検出方法
【課題】簡単な構成で高性能、少実装面積、低コストの電力変換装置の電流検出回路を提供する。
【解決手段】一つの相出力端子と電気負荷の間に電流検出用抵抗1を直列に接続し、一つの相出力端子から出力される被検出相電流により電流検出用抵抗の端子間に生じる電圧を増幅する増幅回路2と、増幅回路により増幅された電流検出アナログ信号電圧を直流電源の負荷側の電位を基準としたアナログーデジタル変換回路4へ伝送するレベルシフトアナログ伝送回路3を備え、増幅回路およびレベルシフトアナログ伝送回路は相出力の電位を基準とした制御用直流電源11より電源供給を受けて駆動し、増幅回路出力の電流検出アナログ信号電圧値はレベルシフトアナログ伝送回路に供給される制御用直流電源の正極電位を基準とした電圧値としたものである。
(もっと読む)
水質測定用調整槽
【課題】 浮遊性の夾雑物がなく、夾雑物の沈殿が可能で計測可能な検水を生成できる水質測定用調整槽を提供する。
【解決手段】 本発明の水質測定用調整槽は、汚水が供給される給水管4と汚水の夾雑物を流出させるオーバーフロー管6と汚水を排出する排水管5とを有する分離槽1と、メッシュ格子板16を有するフィルター槽2と、玉砂利部14を有する玉砂利槽3と、各槽を洗浄する洗浄管とからなるもので、分離槽1は夾雑物をオーバーフロー管6に誘導する導水インバート部8と、フィルター槽2への流出口に設けた越流インバート部9とを有したものである。
(もっと読む)
エンコーダ装置およびその起動方法
【課題】記憶装置に格納されたエンコーダのパルス数や極性などのエンコーダパラメータと、装着するモータの出力や誘起電圧定数、トルク定数などのモータパラメータを自動的に読み出し、エンコーダ信号処理回路に設定することにより、CPUの負荷を軽減し初期化時間を削減することができるエンコーダ装置を提供する。
【解決手段】システムロード開始信号により記憶装置4に格納されたパラメータを自動的に読み出しエンコーダ信号処理回路3の初期設定を行う制御信号生成回路5と、制御信号生成回路が初期設定中に設定する書き込みデータについてサム値の計算を行うサム値計算回路6を備えるようにした。
(もっと読む)
基板搬送用ロボット及びそれを備えた基板搬送装置、半導体製造装置
【課題】基板搬送用ロボットにおいて、基板を目的位置へ搬送する場合の搬送経路の選択肢を増やし、これにより搬送時間の最短経路を選択することを可能にさせる。
【解決手段】基板搬送用ロボットのコントローラが、複数の教示位置が教示された際、教示位置の各々に対するアクセス待機位置11を生成し、アクセス待機位置11から基板搬送用ロボットの最小旋回姿勢12までの複数の経路を生成して記憶する。。
(もっと読む)
多軸移動体の各駆動装置の制御パラメータ決定方法およびその装置
【課題】搭載物を搭載した移動体の場合、従来は重心位置のずれを考慮していないため移動体の走行時に各駆動輪に適正な指令を与えることができなかったが、本発明により重心位置のずれを考慮した安定な走行ができる移動体の駆動装置の制御パラメータ決定方法を提供する。
【解決手段】重量不明の搭載物Wを多軸移動体1の上に重心位置がずれた状態で置き、一定速度に到達するまで多軸移動体1を直線に走行させたときに発生する各駆動装置3a〜3cのトルクを検出し、検出した各トルクから各駆動装置3a〜3cのトルク比を求め、このトルク比から重心位置のずれた距離を推定し、推定した距離を制御パラメータとして演算するようにした。
(もっと読む)
直動回転レゾルバ
【課題】精密な直動X方向の位置と回転θ方向の位置を検出することができ、小形で安価な直動回転レゾルバを提供する。
【解決手段】直動X方向に凸凹形状を有する磁性体のX可動子110と、回転θ方向に凸凹形状を有する磁性体のθ可動子120と、X励磁巻線とX検出巻線から構成されたX固定子210と、θ励磁巻線とθ検出巻線から構成されたθ固定子220とで構成される直動回転レゾルバにおいて、X可動子の凸凹形状をθ方向全周に形成するとともに、X方向測定最大長をLX、各X方向長さをX可動子LMX、X固定子LSX、θ可動子LMθ、θ固定子LSθとしたとき、LX+LSX≦LMX かつ、LX+LSθ≦LMθ 、として構成した。
(もっと読む)
モータ制御装置と制御定数調整方法
【課題】多軸サーボシステムにおいて、加減速動作時においても、所望の軸の応答を規範モデル部と同等にすることができるモータ制御装置を提供する。
【解決手段】速度指令とモータ速度の速度偏差からトルク指令を生成する速度制御部(102)とトルク指令に基づいてモータを駆動する電流制御部(103)とを備えた複数のモータ制御部(10)と、外部装置と内部の入出力処理を行なう入出力処理部(13)と、を備えたモータ制御装置において、速度指令とモデル速度のモデル速度偏差からモデルトルク指令を生成する速度制御モデル部と前記電流制御部の応答を模擬する電流制御モデル部とモデル速度を生成する積分器とを備える規範モデル部(11)と、モデルトルク指令の絶対値の積分値とモータ制御部から選んだ少なくとも一つのトルク指令の絶対値の積分値から速度制御部の制御定数を調整する制御定数調整部(12)と、を備えた。
(もっと読む)
1,101 - 1,110 / 2,482
[ Back to top ]