
ヤマハ発動機株式会社により出願された特許
2,041 - 2,050 / 3,045
スプレーシステム、ダイカスト装置およびスプレー制御方法
【課題】金型の種類によらず均一な離型剤の塗布が可能でかつ離型剤の消費量を低減できるとともに、処理時間の短縮および作業効率の向上が実現できるスプレーシステムおよびスプレー制御方法を提供する。
【解決手段】スプレーシステム110においては、複数のノズル装置300から金型に離型剤およびエアを噴射することができる。複数のノズル装置300においては、離型剤およびエアの噴射方向および噴射位置、ならびに複数のノズル装置300の噴射状態が、スプレー制御部7Bによりそれぞれ独立に設定され、制御される。また、各ノズル装置300による離型剤の噴射状態を設定し、制御することにより、各ノズル装置300による離型剤の噴射を任意のタイミングで停止することができる。
(もっと読む)
液処理装置

【課題】効率よく液体を浄化することができる液処理装置を提供することである。
【解決手段】液処理装置の処理器12は、貯留槽12および浮遊物回収機構22を有する。浮遊物回収機構22は、モータ27およびスクレーパ35を含む。モータ27の回転軸27bが回転することにより、スクレーパ35が、仕切り板26と傾斜面23aとの間を廃液15の液面に沿って前後に移動する。スクレーパ35は、仕切り板26から傾斜面23aに向かって移動する際に、廃液15の液面に浮遊する浮遊物16を掻き集める。掻き集められた浮遊物16は、排出ダクト40から排出される。スクレーパ35の移動速度は、傾斜面23aに近づくにつれて低下する。
(もっと読む)
自動二輪車
【課題】自動変速制御装置とアンチロックブレーキ装置とを備えた自動二輪車において、アンチロックブレーキ装置の動作中に乗員がシフトダウン操作を行った場合であっても、乗り心地の変化が少ない。
【解決手段】自動二輪車のECU(エンジン制御装置)は、ABS(アンチロックブレーキ装置)の動作中には、その旨を示す信号をABSから入力している。そして、ECUは、ABSの動作中にシフトダウンスイッチの操作があった場合には、シフトダウンに係る処理(ステップS210〜S250)を行わず、シフトダウン制御処理を終了させる。これにより、ABSの動作中にシフトダウンスイッチが操作されてもシフトダウンしない。
(もっと読む)
自動二輪車
【課題】傾斜センサの保護のための特別な部品を用いることなく、或いは、強固な取付けを必要とすることなく、検出精度を確保することができる自動二輪車を提供する。
【解決手段】車体の車幅方向における傾斜角度を検出する傾斜センサ45を備えた自動二輪車1において、上記傾斜センサ45を車体に着脱可能に取付けられた車載部品30の下方に配置する。
(もっと読む)
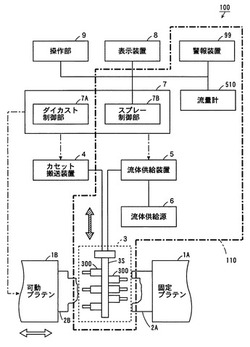
スプレーシステム、ダイカスト装置およびスプレー制御方法
【課題】固形物による目詰まりの発生が十分に防止できるスプレーシステムおよびスプレー制御方法を提供する。
【解決手段】スプレーシステムにおいては、ノズル部材390で目詰りが発生すると、チューブ301内の離型剤が吸引装置545により吸引され、排出される。ノズル装置300に対応して設けられた流体供給系を流れる離型剤の流量が、その流体供給系に設けられた流量計510により測定される。吸引装置545による離型剤の吸引および排出動作は、流量計510の測定値に基づいて制御される。
(もっと読む)
塗布装置および部品実装システム
【課題】塗布液の塗布作業の信頼性を向上させる。
【解決手段】ディスペンサ2は、移動可能なディスペスヘッド25A,25Bを有し、このヘッド25に着脱可能に装着されるシリンジ34に収容された塗布液を基板P上に塗布する。ディスペンサ2は、基板Pとこれに塗布する塗布液(液種)との対応関係を含むプログラムを記憶するプログラム記憶手段42と、シリンジ34に貼付けられたバーコード36の情報(ID)を読み取り可能なバーコードリーダ38と、読み取った情報とシリンジ関連情報記憶手段46に記憶されたシリンジ34の製品リストに基づきシリンジ34に収容される塗布液と基板Pとの対応関係がプログラム記憶手段42に記憶されている対応関係と一致するかを判定し、一致する場合にのみ塗布動作を進行させるべくヘッド25A,25B等を駆動制御する主制御手段41等とを有している。
(もっと読む)
自動二輪車
【課題】自動変速制御装置とアンチロックブレーキ装置とを備えた自動二輪車において、アンチロックブレーキ装置の動作中の乗り心地の変化を少なくすることができる。
【解決手段】自動二輪車のECU(エンジン制御装置)は、ABSが動作中である旨の信号をABSから受けたタイミングで、クラッチアクチュエータに対して駆動信号を供給し、クラッチの切断を行わせる。これにより、ABSの動作開始と同時にクラッチが切断される。
(もっと読む)
実装方法および表面実装機
【課題】実装効率を向上させることができる表面実装機および実装方法を提供する。
【解決手段】プログラム作成部651の干渉確認部651cは、干渉するか否かを確認する電子部品を指定し、その電子部品およびこの電子部品を吸着するノズル43が、搭載済み部品と干渉するか否かを判定する。この判定は、最大設定吸着位置ずれ値よりも小さい設定吸着位置ずれ値を用いて行われる。従来では、干渉が絶対に発生しないように吸着ずれの最大値に余裕を見込んだ値を用いて干渉チェックを行っていたが、本発明では、従来よりも値の範囲が狭い設定吸着位置ずれ値を用いることにより、移送経路を短くすることができるので、結果として実装効率が向上する。また、廃棄部品を最小限とすることができる。
(もっと読む)
無人ヘリコプタの基地局構成
【課題】 ユーザがオプションにより機体にペイロード機器を搭載した場合に、基地局の機体操縦装置のプログラム等を書き換えることなく、各種の任意のペイロード機器を基地局から操作可能な無人ヘリコプタの基地局構成を提供する。
【解決手段】 機体と通信するためのアンテナ44,45a,46aと、このアンテナに接続された通信機(通信機ボックス76)と、この通信機に接続された機体操縦装置66と、この機体操縦装置66に接続された電源58,61とを備えた無人ヘリコプタの基地局構成において、機体に搭載されたペイロード機器を専用に操作するためのペイロード操作装置67を前記機体操縦装置66に接続可能とした。前記機体操縦装置66およびペイロード操作装置67は、それぞれパッケージ化された持ち運び可能な操縦ボックス77,78によって構成した。
(もっと読む)
車両
【課題】駆動輪がロックしやすい状況でも急制動後の再発進を確実に行う。
【解決手段】駆動源52と無段変速機100と制御装置60とを備えた車両1000である。無段変速機100におけるプライマリシーブ10及びセカンダリシーブ20は、固定フランジ(10a、20a)及び可動フランジ(10b、20b)から構成されている。プライマリシーブ10の溝幅10cは、可動フランジ10bを電動モータ14で移動制御することによって調整され、セカンダリシーブ20の可動フランジ20bは、スプリング73およびトルクカム75によって溝幅を狭める方向に付勢されている。制御装置60にはシーブ位置検出装置16が接続されており、シーブ位置検出装置16は少なくとも急制動時におけるフランジ(10b)位置の情報を制御装置60に出力する。制御装置60は、車両の再発進時において、前記フランジ位置の情報に基づいて電動モータ14を制御する。
(もっと読む)
2,041 - 2,050 / 3,045
[ Back to top ]