
トーヨーコーケン株式会社により出願された特許
11 - 19 / 19
荷役機械
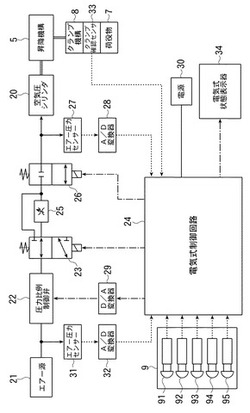
【課題】荷役機械の動作状態、異常発生時の状態などを正確に表示することにより容易かつ迅速な対策を可能にした荷役機械を提供する。
【解決手段】本発明は、上下方向に移動自在に構成され、所定の荷役物7をクランプ機構8によって保持して昇降させる昇降機構5と、エアー源21から供給されるエアーの圧力によって昇降機構5を駆動する空気圧シリンダ20と、空気圧シリンダ20に給排気するエアーの流量及び圧力を操作ボックス9からの命令に基づいて制御する電気式の制御回路24と、当該装置の動作状態を検出してその結果を制御回路24に出力するセンサー27、31、33と、操作ボックス9からの命令とセンサー27、31、33の検出結果に基づき制御回路24からの命令によって当該装置の状態を表示する電気式の状態表示器34とを有する荷役機械である。
(もっと読む)
荷役機械、荷役機械の運転方法

【課題】バランスモードで荷役物が勝手に上下移動しない技術を提供する。
【解決手段】制御回路21が圧力制御装置25に設定信号を出力し、エアーシリンダ24内の圧力は圧力センサ15によって測定されて測定信号として制御回路21に入力されている。本発明の荷役機械11では、予め設定信号と測定信号の関係を実測しておき、制御回路21は入力された測定信号を記憶内容の関係から設定信号に変換し、圧力制御装置25に出力しており、その結果、測定された負荷バランス圧と等しい圧力を圧力制御装置25から出力することができる。
(もっと読む)
荷役機械、搬送方法
【課題】安定な動作で確実に操作力を軽減できる荷役機械と搬送方法を提供する。
【解決手段】荷役機械11では、シリンダ121内の圧力変化が補助センサ21で検出されており、シリンダ121内が負荷バランス圧P2に設定されている状態で、荷役物119に加わった操作力が上向き方向の成分を有することが検出されると、制御回路131がシリンダ121の内圧をΔP1昇圧し、上向きの補助力Δf1を発生させ、下向き方向の成分を有することが検出されるとΔP2減圧し、下向き方向の補助力Δf2を発生させる。操作力と同方向の補助力が加えられるので作業者125の負担が軽減される。
(もっと読む)
荷役機械
【課題】操作が単純で作業効率を向上させることができるとともに構成が簡素で安価な荷役機械を提供する。
【解決手段】本発明は、上下方向に移動自在に構成され荷役物7をクランプ機構8によって保持して昇降させる昇降機構5と、エアー源21から供給されるエアーの圧力によって昇降機構5を駆動する空気圧シリンダ20と、クランプ機構8の動作と空気圧シリンダ20に給排気するエアーの流量及び圧力を操作ボックス9からの命令に基づいて制御する制御回路24とを備えた荷役機械である。操作ボックス9に自動制御用スイッチとして、クランプ−既知負荷バランスボタン91、クランプ−未知負荷バランスボタン92、下降−アンクランプボタン93が設けられ、これらスイッチの操作による命令に基づいて複数の処理を連続的に行うように構成されている。
(もっと読む)
荷役機械
【課題】作業性を格段に向上させることができるとともに、保持した荷役物や荷役機械本体に対して適切な位置で作業することができる荷役機械を提供する。
【解決手段】本発明は、上下方向に移動自在に構成され所定の荷役物7を保持して昇降させる昇降機構5と、エアー源21から供給されるエアーの圧力によって昇降機構を駆動する空気圧シリンダ20と、空気圧シリンダ20に対し給排気するエアーの流量及び圧力を制御するエアー制御部10と、エアー制御部10に対し無線によって操作命令を与える無線式操作ペンダント9とを有する荷役機械である。
(もっと読む)
荷役機械及びその制御方法
【課題】保持する荷役物の重量に関係なく、昇降機構を所望の速度で上昇及び下降動作させることができる荷役機械を提供する。
【解決手段】本発明の荷役機械は、上下方向に移動自在に構成され所定の荷役物Qを保持して昇降させる昇降機構5と、昇降機構5をエアーの圧力によって駆動する空気圧シリンダ20と、エアー源21から供給されるエアーの圧力を所定の圧力に調整して出力する圧力比例制御弁22と、圧力比例制御弁22から出力されるエアーの流量を所定の値に低下させて空気圧シリンダ20に供給する流量制御弁25とを有する。圧力比例制御弁21から出力されるエアーの圧力を、空気圧シリンダ20におけるエアーの圧力に基づいて所定の値に制御するとともに、その出力されるエアーの流量を低下させて亜音速領域の流量のエアーを空気圧シリンダ20に供給する。
(もっと読む)
巻上機
【課題】装置に異常が発生した場合でもオペレータに装置の状態を正確に知らしめ、適切かつ迅速な対応処置を取らせることを可能にした巻上機を提供する。
【解決手段】本発明は、所定の荷を保持して巻き上げ、かつ、巻き降ろすための巻上機構4と、巻上機構4を駆動する駆動モータ5と、駆動モータ5の動作を制御する制御回路部9と、作業者による巻上機構4に対する動作指令を制御回路部9に与えるための操作ペンダント12とを有する巻上機1であって、操作ペンダント12に、当該装置の動作状態を検出した結果に基づいて当該装置の状態を表示する状態表示ランプ17が設けられているものである。駆動モータ5に供給される電源電圧と、駆動モータ5の駆動電流を検出し、その結果に基づいて状態表示ランプ17を所定の周期及びパターンで点滅させる。
(もっと読む)
荷役機械
【課題】多種類の荷役物をバランス状態にして移載するエアー式荷役機械において装置構成の簡素化及び低コスト化を達成する技術を提供する。
【解決手段】本発明の荷役機械は、上下方向及び水平方向に移動自在に構成され、所定の荷役物Qを保持して移動させるためのアームを有する昇降機構5と、アームを鉛直方向に駆動するための空気圧シリンダ20と、所定のエアー源から供給されるエアーの圧力を調整して空気圧シリンダ20に出力する電空レギュレータ22と、電空レギュレータ22から空気圧シリンダ20に出力するエアーの圧力を荷役物Qの重量に対応して記憶するバランス圧記憶部28と、バランス圧記憶部28に記憶された情報に基づいて電空レギュレータ22における出力エアー圧を制御する制御回路24とを有する
(もっと読む)
荷役機械
【課題】教示した作業位置以外の場所における再生動作を禁止することが可能な荷役機械を提供する。
【解決手段】本発明は、電動式の荷役機械であって、操作ボックス7からの動作指令に基づいて教示される所定の作業を、絶対位置検出器32における絶対位置情報に関連付けて記憶する教示作業記憶部27を備える。操作ボックス7に、第1及び第2の作業教示スイッチ11A、11Bと、第1及び第2の教示作業再生スイッチ15A、15Bとが設けられる。作業教示スイッチ11A、11Bをオンにした状態で動作させることにより再生停止位置を設定して教示作業記憶部27に記憶する。教示作業再生スイッチ15A、15Bをオンにし、教示作業記憶部27に記憶されたクランプ機構9の再生停止位置と現在のクランプ機構9の位置との距離を比較して所定の範囲内の場合にのみ位置再生を行う。
(もっと読む)
11 - 19 / 19
[ Back to top ]