
大同マシナリー株式会社により出願された特許
1 - 10 / 27
識別標識用線材取付装置
【課題】識別標識が取付けられた識別標識用線材を、結束集合体に正確かつ効率よく取付ける。
【解決手段】識別標識用線材取付装置12は、識別標識用線材120における線状本体部121を着脱可能に把持する把持手段60と、把持手段60で把持された識別標識用線材120の線状本体部121の長手方向における一方の端部側に鉤状に形成された掛止部123に係脱可能に係止する係止手段61と、結束集合体の外周部と結束線材との間に形成された隙間の位置を認識する機能を備えた測定手段62とを備える。識別標識用線材取付装置12は、把持手段60で把持した識別標識用線材120の掛止部123の先端を測定手段62で認識した隙間に差込み、差込まれた掛止部123に係止させた係止手段61を移動させて該掛止部123を該結束線材に掛止させる。
(もっと読む)
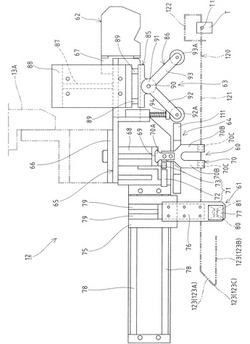
矯正機

【課題】装置のコンパクト化を図り得ると共に、オーダ変更に伴う段取り時間を短縮し得る矯正機を提供する。
【解決手段】一対の矯正ロール12,13が左右方向に対向して配置される。第2矯正ロール13は、調節モータ46を備えた開閉・間隔調節機構45によって第1矯正ロール12に対して近接・離間移動するよう構成される。両矯正ロール12,13の下方にガイド部材51が配設される。第2矯正ロール13を開放位置に移動したもとで、両矯正ロール12,13の間に供給される軸部材は、軸部がガイド部材51で下方から支持される。第2矯正ロール13を閉成位置に移動することで、ガイド部材51で支持される軸部が両矯正ロール12,13で左右方向から挟持され、該ロール12,13の回転によって軸部材は回転しつつ軸方向に移動して軸部の矯正が行なわれる。
(もっと読む)
結束集合体の隙間位置測定方法
【課題】結束集合体の外周部と結束線材との間に形成された隙間を適切に測定して、識別標識が取付けられた識別標識用線材の掛止部を正確に隙間へ差込むようにする。
【解決手段】結束集合体125の周方向の所定範囲に亘って測定手段62で外面形状を測定する。測定手段62が測定した結束集合体125の外面形状において、該結束集合体125の外周部125Aから突出した第1頂点P1と、この第1頂点P1から該結束集合体125の周方向に隣接して外周部から突出する第2頂点P2とを抽出する。第1頂点P1が現れる結束対象物126と第2頂点P2が現れる結束対象物126の接線106を算出する。そして、接線10の外周部125A側を、隙間Hの形成位置として算出する。
(もっと読む)
識別標識取付システム
【課題】識別標識が取付けられた識別標識用線材を、結束集合体に正確かつ効率よく取付ける。
【解決手段】識別標識取付システムSは、識別標識用線材を成形する識別標識用線材成形装置10と、識別標識用線材成形装置10で成形された識別標識用線材を結束集合体125に取付ける識別標識用線材取付装置12とを備える。識別標識用線材成形装置10は、線状本体部の長手方向における一方の端部に、識別標識を取付ける識別標識取付部を成形すると共に、該線状本体部の長手方向における他方の端部に、結束集合体の結束線材に引掛ける掛止部を成形する。識別標識用線材取付装置12は、識別標識用線材成形装置10で成形された識別標識用線材を受取る受取り位置と、結束集合体125に該識別標識用線材を取付ける取付け位置との間を移動する。
(もっと読む)
識別標識用線材およびその成形装置
【課題】結束対象物を結束した状態の結束線材に対して安定した状態で掛止させることができる識別標識用線材を提供する。
【解決手段】識別標識用線材120は、線状本体部121の長手方向における一方の端部側に設けられ、結束集合体の結束線材に掛止される掛止部123と、線状本体部121の長手方向における他方の端部側に設けられ、識別標識Tを脱落不能に保持する識別標識取付部122とを備える。掛止部123は、線状本体部121に対し鈍角に折曲する第1掛止部123Aと、第1掛止部123Aに対して鋭角に折り返され、識別標識取付部122の側に向いた第2掛止部123Bとを備える。
(もっと読む)
棒材の計数方法
【課題】積層された棒材を正確に計数することができる棒材の計数方法を提供する。
【解決手段】積層された複数の棒材1につきその端面の画像11を含む検出画面2を得る検出画面取得ステップと、棒材1の端面の形状に応じた所望形状の画像をテンプレート画像として記憶するテンプレート画像記憶ステップと、検出画面2の各画素の輝度を検出し、検出された輝度のうち最大輝度に応じた所定の閾値を設定して当該閾値に基づいて検出画面を二値化した二値化画面4を得る二値化ステップと、二値化画面4中の各端面画像11についてテンプレート画像3の面積に対し所定範囲内の面積を有する端面画像11を特定して当該端面画像11の数を計数するとともに、当該端面画像11を検出画面2から消去する画像消去ステップとを備え、検出画面2中の全端面画像が消去されるまで二値化ステップと画像消去ステップを繰り返し、上記画像消去ステップで計数された画像数の積算値を、積層された棒材の本数とする。
(もっと読む)
太陽光発電装置
【課題】停電時などでも、太陽光発電パネルを自動的に水平姿勢などの受風面積を最少にでき、追尾装置の動力伝達部や上記パネルの破損を確実に防止できる太陽光発電装置を提供する。
【解決手段】縦横に複数個ずつドーム型フレネルレンズ(集光レンズ)2を連設した集光レンズユニット1を外側に有する太陽光発電パネルPと、該発電パネルPが太陽を追尾できるように、係る太陽光発電パネルPを地軸方向に沿って傾動させ且つ太陽の軌道に沿って旋回可能にして支持する支柱20と、該支柱20の上端部に配置され、上記太陽光発電パネルPを傾動可能および旋回可能とするモータM1,M2を含む動力伝達部22a,22b,26,27,31と、を備え、停電時または電気系統の故障により上記モータM1,M2が停止した際に、上記太陽光発電パネルPが自重(W)により地軸方向に沿って傾動することで、水平姿勢となる、太陽光発電装置S。
(もっと読む)
曲げ加工方法
【課題】各部位によって曲げ加工時に発生するスプリングバック量が異なる金属板を精度良く連続的に曲げ加工する。
【解決手段】金属板20において、幅方向の断面積が長手方向で一様な標準部26のスプリングバック係数と、標準部26とは幅方向の断面積が異なる異形部27のスプリングバック係数とを予め算出して制御手段24にデータ入力する。金属板20の曲げ加工に際し、上ロール10の位置を、各スプリングバック係数に基づいて算出した加圧位置まで移動するよう制御手段24で昇降駆動機構18を制御し、金属板20に付与する加圧力を調節しつつ、該金属板20の全長に亘って連続的に曲げ加工を行なう。
(もっと読む)
玉掛けロボット及びこれを用いた玉掛けシステム
【課題】不正確な玉掛けを解消して、正確に玉掛けを実施することができる玉掛けロボット及びこれを用いた玉掛けシステムを提供すること。
【解決手段】玉掛けシステム1は、多関節ロボット20bと、多関節ロボット20bのアームに取り付けられるロボットハンド30であって、鋼材玉掛用の吊ワイヤを把持又は解放するロボットハンド30と、吊ワイヤに取り付けられた反射テープ14cを照明する照明機器18aと、所定の検出感度に設定され反射テープを検出しカメラ映像として出力するCCDカメラ18bと、そのカメラ映像に基づいて反射テープの位置を求める画像処理雄値18と、反射テープの位置に基づいて吊ワイヤを把持させる把持命令をロボットハンド30に送信して当該ロボットハンド30を制御する玉掛けロボット制御装置16とを備える。
(もっと読む)
研削台車
【課題】 鋼片をその中心軸線のまわりに、少ない角度ずれで転回位置決めして研削に供することができ、研削粉による装置の寿命低下も防止できる研削台車を提供する。
【解決手段】 研削装置に対して長手方向に往復駆動され鋼片Wの下面を支持する支持台10を長手方向に間隔をおいて複数個固設してなる台車3と、台車3の上側に配置されて該台車と平行な長手方向に延び、鋼片の下面を支持する支持体と鋼片を挟持するクランプ具とをそなえたクランプ台20を、長手方向に間隔をおいて複数個固設してなる揺動台4と、揺動台4の長手方向に直交する垂直面内に配置された3本の伸縮自在なアクチュエーター32,33,34を、揺動台4の長手方向両端位置に互いに対向して2組配設して、並進2自由度及び回転1自由度を有するパラレルリンク機構を形成する揺動台駆動装置5と、台車3と揺動台4の長手方向の相対移動を規制するガイド6とを、具備した。
(もっと読む)
1 - 10 / 27
[ Back to top ]