
バレオ・シャルター・ウント・ゼンゾーレン・ゲーエムベーハーにより出願された特許
11 - 18 / 18
ステアリング・コラム・スイッチ

【解決手段】本発明は、ステアリング・コラム・スイッチに関し、このステアリング・コラム・スイッチは、操作要素(24)を有する少なくとも1つのコントロール・レバーを有する。このコントロール・レバーの内側にはガイド溝(36、38、40)を有しており、このガイド溝は支持体(28)に隣り合っており、この支持体には少なくとも1つのマイクロスイッチ(58)が格納されている。前記支持体内にはタペット(32)が案内され、その一端が前記ガイド溝と、その他端が前記マイクロスイッチと接触している。 (もっと読む)
スイッチ・モジュール

この発明は、軸受ハウジングに軸支して設置されたセレクタレバー(14)を有するスイッチ・モジュールに関する。セレクタレバー(14)は、互いに反対側にあって突出する2つのトラニオンを有し、前記軸受ハウジングは複数の収容開口(18)を有する。
収容開口(18)の少なくとも一部分は、多角形状に形成されており、セレクタレバー(14)には、そのトラニオン(20)とともに、頂部の方向に、力が加えられている。
(もっと読む)
検出装置の検出領域で障害物を検出する方法
この発明は、障害物の存在する空間をモニタするための方法および装置に関する。このモニタ装置は、通常、少なくとも1つの送信装置と第1および第2の受信装置を有する。この発明の目的は、情報の信頼性を改善する方法および装置を提供することである。この目的のために、第1受信装置よりも送信装置からより離隔している第2受信装置の信号が、その寄生信号部分のために評価される。第1および第2受信装置間の距離があまりに大きくなければ、この第2受信信号に検知される寄生信号部分が、第1信号にも含まれていると仮定することができる。この場合に、望ましいことは、その空間をモニタすることを中止すること、あるいは、少なくとも寄生信号部分が第2受信信号の繰返し評価において検知されない間に既に得られたこの検知のいかなる結果をも破棄することである。 (もっと読む)
車両の周囲にある障害物の輪郭を検出するための方法およびコンピュータプログラム
【課題】本発明は、好ましくは車両の側方領域に組み込まれているセンサ手段(110)によって、走行する車両(200)の周囲にある障害物(300)の輪郭を検出する方法に関する。
【解決手段】発生された反射信号をまず数学的に平均化して、かくて得られた平均化された反射信号から、障害物の実際の位置および障害物の輪郭の実際の形状をより正確に導き出すことができる。 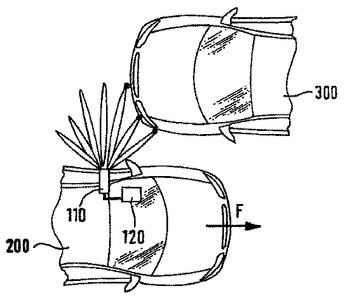 (もっと読む)
(もっと読む)
距離測定手段と障害物との間の放射された距離を検出するための方法および距離検出装置
この発明は、測距装置および障害物の表面の最近点間の放射された距離を測定するための方法および装置に関し、前記点および測距装置の間の放射された距離は、前記障害物のあらゆる点に関して本来的に最短である。この発明の目的は、前記点Pが、もはや前記測距装置の検出領域内に位置していないときに、最近点および測距装置の間の現在の距離を計算することである。この目的のために、放射された距離の計算は、前記測距装置と障害物との相対的移動に関する情報、およびこの発明にしたがって規定された限界距離に基づいてなされる。 (もっと読む)
車両用のステアリングギヤモジュール
【課題】本発明は、車両のための、特に自動車両のためのステアリングギヤモジュール(12)に関する。
【解決手段】プリント回路板(20)およびコンタクトスライダ(26)は、共通の予め取り付けられたユニット(13)の一部であり、この予め取り付けられたユニットは、コンタクトスライダ(26)が、スイッチユニットの、予め取り付けられたユニット(13)との取付の際に、スイッチユニット(36)の機構(38)と可動に結合されるように、形成されている。  (もっと読む)
(もっと読む)
デジタル式のカメラ装置およびデジタル式のカメラ装置を製造する方法
【課題】画像処理中に結像手段で計算によってなされる訂正を不要にすること。
【解決手段】複数のピクセル素子の密度は、これらのピクセル素子を光センサ手段(120)に平面状に設けるために、対物レンズ手段の焦点距離の大きさに従って、算定されている。  (もっと読む)
(もっと読む)
自動車に用いるためのレーダセンサ
【課題】本発明は、パルス放射線を発する、自動車に使用するためのレーダセンサに関する。
【解決手段】このレーダセンサは、層状に構造化されており、かつ八木原理に基づいて設けられた複数の金属層(36,38,40,42)を有する少なくとも1つのブロック(34)を具備し、複数の金属層は、夫々、誘電性の中間層(46,48,50)によって互いに分離されており、少なくとも1つの金属層(36,38,40,42)が、レーダ周波数を有する供給回路(18)によって励起される。  (もっと読む)
(もっと読む)
11 - 18 / 18
[ Back to top ]