
アトラス エレクトロニク ゲゼルシャフト ミット ベシュレンクテル ハフツングにより出願された特許
1 - 10 / 13
無人の水中航走体および無人の水中航走体を運転するための方法
【課題】水中の対象物の構造および輪郭を可能な限り迅速にかつ正確に検出することができるようにする。
【解決手段】無人の水中航走体1であって、少なくとも1つのセンサユニット7が設けられており、該センサユニット7によって、水中航走体1の周辺における対象物のセンサ情報8が獲得可能である。少なくとも1つのセンサユニット7が、水中航走体1の長手方向軸線14に対して接線方向の水中航走体1の接線方向12に可動に配置されているかまたは長手方向軸線14に対して平行に延びる軸線に対して接線方向の水中航走体1の接線方向12に可動に配置されていて、センサ情報8が設定可能である位置決め装置13によって接線方向12において位置決め可能である。
(もっと読む)
無人の水中航走体および無人の水中航走体を運転するための方法

【課題】無人の水中航走体による水中範囲の調査に対する手間を減少させる。
【解決手段】無人の水中航走体1が、制御装置3によって、設定可能な制御情報に基づき制御可能である。無人の水中航走体1が、自律運転モードまたは遠隔操舵運転モードで選択的に制御可能であり、自律運転モードでは、制御装置3に、記憶素子13からの事前に求められた内的な制御情報が設定可能であり、遠隔操舵運転モードでは、制御装置3に、水中航走体1の通信装置11を介して外的な制御情報が設定可能である。
(もっと読む)
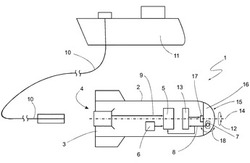
無人の水中航走体および無人の水中航走体に光導波路ケーブルを接続するための装置
【課題】ミッションのコストが削減される、無人の水中航走体に光導波路ケーブルを接続するための装置ならびに無人の水中航走体を提供する。
【解決手段】接続ケーブル8と、該接続ケーブル8の各端部9,10に設けられた、光導波路ケーブル3および無人の水中航走体1に対する接続エレメント11,12とが設けられているようにした。接続ケーブル8の端部9,10が、それぞれ接続コネクタ13,14を有しており、接続エレメントが、接続ケーブルの端部に対する張力緩和エレメント17,18を有している
(もっと読む)
海底輪郭を測定するための方法と装置
本発明は、船舶に取り付けられている、水中領域に音波信号を方向付けて送出するための送信装置と、船舶に取り付けられている、水中領域内の海底輪郭から反射された音波を受信する少なくとも二つの変換器を備えている受信装置とを用いて、海底輪郭を測定する方法に関する。送信装置によって、相互に異なる複数のN個の所定の周波数を用いて音波信号が水中領域に送出され、海底輪郭から反射された、音波信号の成分が受信装置によって受信される。N個の周波数及び複数のサンプリング時点に関して、位相差も伝播時間も求められる。所定の領域内の行路差の数からデータ密度が求められ、データ密度が最大になる領域が選択される。表面に属する行路差から海底輪郭の入射座標が求められる。更に本発明はこの種の方法を実施する装置に関する。  (もっと読む)
(もっと読む)
海底輪郭を測定するための方法と装置
本発明は、音波信号を方向付けて送出するための送信装置と、海底輪郭から反射された音波を受信する少なくとも二つの変換器を備えている受信装置とを用いて、海底輪郭を測定する方法に関する。海底輪郭までの相互に異なるアスペクト角及び距離を有する所定の位置からの複数のN回の測深でもって音波信号が送出される。複数のサンプリング時点及びN回の測深に関して、変換器の受信信号から、位相差、位相差から生じる行路差、所属の入射角度及び入射座標が求められる。入射座標を含む所定の領域におけるデータ密度が求められる。データ密度が最大になる領域が選択され、海底輪郭を求めるために、前記領域に属する入射座標を使用する。更に本発明はこの種の方法を実施するための装置に関する。  (もっと読む)
(もっと読む)
自立形のガラス繊維スプール及び自立形のガラス繊維スプールの製造方法
本発明は、情報を伝達するための、内部から繰り出し可能なガラス繊維(13)の巻線(20)の重合する層を備える自立形の回巻体(12)を有するガラス繊維スプールに関する。巻線(20)は、接着性の結合剤によって互いに固定されている。繰り出し時にループが回巻体(12)から引き出されることなく内部から確実に繰り出し可能な、十分に安定な自立形の回巻体(12)を実現するために、回巻体(12)は、クロスワインディングとして構成され、かつ結合剤としては、耐海水性であって化学的に不活性の、加熱によって液化可能な炭化水素ベースの含浸剤が使用される。 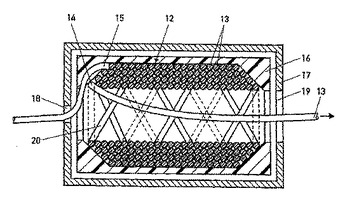 (もっと読む)
(もっと読む)
音波を放出するターゲットの方位測定方法
複数の電気音響変換器(11)を有する細長い水中アンテナ(10)によって、音波を放出するターゲットの方位を測定するための方法を提供する。本方法では、前記電気音響変換器(11)の受信信号から、水中の測定された音速値(Cmess)を使用して方位選択的に、前記ターゲットの水平方向のターゲット方位を求める。このような水中アンテナに付随して、とりわけ方位角が大きくなると方位測定結果に誤りを生じさせる原因となるシステム的な方位測定誤差を補償するため、音波伝搬モデルによって、前記ターゲット方位(βZk)によって予め決定されている音波伝搬方向での音波ビーム経過を計算し、該音波ビーム経過から、推定されたターゲット距離およびターゲット深度で、アンテナ位置における垂直方向の音波入射角(γk)を求める。垂直方向音波入射角(γk)から補正係数を導出し、該補正係数と前記測定された音速値(Cmess)とを乗算することによって該音速値(Cmess)を補正する。補正された前記音速値(Ceinstell)によって再び方位測定を行い、改善されたターゲット方位(βZk)を得る。  (もっと読む)
(もっと読む)
音響的な水中アンテナ
相互に一定の間隔をあけて配列されている電気音響的な変換器(29)と、変換器(29)の電気的な信号を処理するために変換器(29)に対応付けられている電子アセンブリと、変換器(29)および電子アセンブリを包囲するアンテナカバーとを備えた音響的な水中アンテナにおいて、水中アンテナの高い送信周波数および/または受信周波数を達成するために一層小さくすることができる変換器の間隔を達成するために、アンテナカバーにおいて隣接する変換器(29)のそれぞれ2つの電子アセンブリが変換器(29)間に配置されている1つの電子モジュール(28)に統合されており、相互に背を向ける2つの自由なモジュール面に2つの前記隣接する変換器(29)のうちの1つがそれぞれ設けられている。  (もっと読む)
(もっと読む)
無人の水中航走体の降下およびトラッキングのための装置
水中航走体(10)の降下およびトラッキングのための装置は、保持ケーブル(17)の端部に配置されたキャリア(12)と、このキャリア(12)に配置された、水中航走体(10)を切り離すために制御可能な保持部材(13)を用いて水中航走体(10)を収容するための保持装置(13)と、水中に投入された水中航走体(10)の音響的な位置決定のためにキャリア(12)に配置されたトラッキング装置(25)とを有している。小さなプラットフォームでの取扱いに適していて、トラッキング装置(25)の音響的に妨害されない作業を保証する軽量でコンパクトな降下装置を提供するために、トラッキング装置(25)は長手方向に延ばされて形成されたキャリア(12)の所定の端部に配置されていて、キャリア(12)はその中央の長手方向領域において保持ケーブル(17)に枢着されている。旋回装置が、保持装置(13)からの水中航走体(10)の切離し後に、降下位置からトラッキング位置にトラッキング装置(25)を備えたキャリア(12)を旋回させる。  (もっと読む)
(もっと読む)
潜水船の追跡のための装置及び方法
潜水船(11)の追跡のための装置及び方法において、プラットホーム(13)は、潜水船(11)の現在位置の規定のための追跡装置(15)と一緒に水中内に投入され、かつ潜水位置で三次元的に安定にされるようになっている。このために、プラットホーム(13)は、水平方向若しくは垂直方向に作用する操縦駆動部(18,19)を有しており、該操縦駆動部は制御回路内に配置されている。  (もっと読む)
(もっと読む)
1 - 10 / 13
[ Back to top ]