
株式会社国際電気通信基礎技術研究所により出願された特許
301 - 310 / 905
光ファイバジャイロ
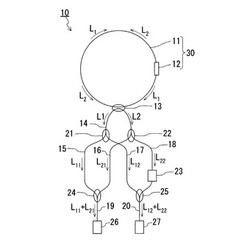
【課題】低速回転時でも精度よく回転角速度を求めることができる光ファイバジャイロを提供する。
【解決手段】本発明のジャイロは、環状の光ファイバ11と、光ファイバ11内を互いに逆方向に進行するレーザ光L1およびL2を発生させる半導体光増幅器12と、光ファイバ11からレーザ光L1およびL2を引き出す結合器13と、レーザ光L1をレーザ光L11とL12とに分岐する分岐器21と、レーザ光L2をレーザ光L21とL22とに分岐する分岐器22と、レーザ光L11とL21とを結合する結合器24と、レーザ光L12とL22とを結合する結合器25と、結合されたレーザ光L11およびL21とを検波するフォトダイオード26と、結合されたレーザ光L12およびL22を検波するフォトダイオード27とを備える。フォトダイオード26で検出される信号の位相と、フォトダイオード27で検出される信号の位相との差が、10°〜170°または−10°〜−170°の範囲にある。
(もっと読む)
行動識別装置、行動識別システムおよび行動識別方法

【構成】 行動識別システム10はサーバ12を含み、サーバ12はセンサ装置16から送信される加速度データを受信し、センサDB20に記憶する。複数のセンサ装置16は被験者の左右の手首、足首および腿に装着される。センサ装置16には加速度センサが設けられ、この加速度センサからの加速度データがサーバ12に送信される。サーバ12は、加速度データを用いて被験者の姿勢を検出するための姿勢特徴量を算出する。サーバ12は、算出した姿勢特徴量に従って被験者の姿勢を識別すると、その姿勢の中で取り得る行動を識別するための行動特徴量をその加速度データを用いて算出する。そして、行動特徴量に基づいて、識別された姿勢の中で取り得る複数の行動から1の行動を識別する。
【効果】 識別した姿勢の中で取り得る行動を識別するので、被験者の複雑な行動を正確に識別することができる。
(もっと読む)
レーザジャイロ
【課題】低速回転時でも精度よく回転角速度を求めることができるジャイロを提供する。
【解決手段】本発明のレーザジャイロは、周回している光ファイバ11と、光ファイバ11内を互いに逆方向に進行する第1および第2のレーザ光を発生させる半導体光増幅器12と、第1および第2のレーザ光によって発生するビート信号を検出するフォトダイオード16とを備え、光ファイバ11の周回数m(mは整数)が以下の式(1)で表される。
[式中、cは、光速度(m/秒)を示す。λは、第1および第2のレーザ光の波長(m)を示す。γは、共振器内の反射率を示す。B0は、所定の形状の面積(m2)を示す。Ω0は、検出すべき最小回転角速度(度/秒)を示す。]
(もっと読む)
受信装置
【課題】リアクタンス制御の高速化が可能な受信装置を提供する。
【解決手段】リアクタンステーブル60は、アレーアンテナ10に到来する到来波の到来方向と、アレーアンテナ10によって形成されるビームを到来方向に向けるためのリアクタンス値との関係を保持する。制御手段50は、リアクタンステーブル60の各リアクタンス値をバラクタダイオード5,6に設定してパケットPKTのプリアンブルの一部を受信したときの受信信号と、リアクタンステーブル60の各到来方向からアレーアンテナ10に到来する到来波の受信信号との相関値が最大になるときのリアクタンス値をリアクタンステーブル60から選択し、その選択したリアクタンス値にバラクタダイオード5,6のリアクタンス値を制御する。そして、制御手段50は、その選択したリアクタンス値を固定してデジタルビームフォーミングを行なう。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】背景及び前景を含む動画像から前景領域を高精度に且つ高速に抽出することができるロバストな画像処理装置を提供する。
【解決手段】画像取得部13は、動画像を取得し、背景モデル作成部12は、取得された動画像の各画素の分布の尖度に応じて、一般化ガウス分布に属する分布を有する複数種類の背景モデルのうち一の背景モデルを画素毎に決定し、決定した背景モデルを基に、前景を含まず、背景を含む背景モデル画像を作成し、背景差分部14は、処理対象画像から背景モデル画像の輝度背景画像を差分して差分画像を作成し、領域区分部15、影除去部16、ラベリング部17、輪郭抽出部18、領域成長部19及び前景領域抽出部20は、差分画像を基に処理対象画像から前景領域を抽出する。
(もっと読む)
無線ネットワークおよびそれに用いられる無線装置
【課題】ネットワーク負荷を低減して渋滞情報を配布可能な無線ネットワークを提供する。
【解決手段】領域REG5内で発生した渋滞に近づいている車両C4に搭載された無線装置M4は、渋滞パケットを生成して送信し、車両C4の後続車である車両C5〜C8,C17,C18にそれぞれ搭載された無線装置M5〜M8,M17,M18は、無線装置M4からの渋滞パケットをユニキャストによって無線装置M9,M17,M19へ転送する。そして、無線装置M17,M9,M19は、それぞれ、領域REG6,REG7,REG8内で渋滞パケットをブロードキャストする。この場合、渋滞隊列中の無線装置M1〜M3は、渋滞情報の発信を停止し、無線装置M5〜M8,M17,M18は、新たな渋滞情報の発信を停止する。
(もっと読む)
照明モデル作成装置、照明モデル作成方法及び照明モデル作成プログラム
【課題】一様ではない照明環境下における撮影空間の照明モデルを容易に作成することができる照明モデル作成装置を提供する。
【解決手段】ビデオカメラ11〜1Kは、撮影空間の所定位置に固定され、撮影空間内で移動されるマーカーを撮影し、照明モデル作成部23は、ビデオカメラ11〜1Kの各々の位置及び姿勢と、ビデオカメラ11〜1Kにより撮影されたマーカーの各撮影時点の位置とから、ビデオカメラ11〜1Kにより撮影された画像に含まれるマーカー観測画素に対応するマーカー面上の法線ベクトルを決定し、決定した法線ベクトルと、撮影されたマーカーの画素値とを用いて、撮影空間中における照明条件の位置による変化を表す照明モデルを作成する。
(もっと読む)
光学マーカシステム
【課題】特殊な撮影手段を用いることなく、移動する撮影手段の位置及び姿勢を安定的に推定することができる光学マーカシステムを提供する。
【解決手段】 LEDマーカ21〜2mは、予め定められた位置に取り付けられ、自身に対して一意的に割り付けられた固有の点滅パターンで点滅する。このとき、カメラ30は、LEDマーカ21〜2mの発光点及び特徴点を含む画像を撮影し、候補点検出部40は、撮影された画像に含まれる発光点及び特徴点を候補点として検出し、発光状態検出部50は、各候補点を追跡して点滅パターンを検出し、マーカ特定部60は、点滅パターンからLEDマーカ21〜2mを特定し、カメラ位置姿勢推定部70は、マーカ特定部60により特定されたLEDマーカ21〜2mの3次元位置等からカメラ30の位置及び姿勢を推定する。
(もっと読む)
無線装置、それにおけるチャネルの選択をコンピュータに実行させるためのプログラムおよびそのプログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】同時通信が許容される無線通信システムにおいて特定の無線装置からの情報を確実に受信可能な無線装置を提供する。
【解決手段】無線装置10B,10C,10D,10Eは、それぞれ、自己が搭載された車両B,C,D,Eが衝突する可能性のある車両A,B,C,Dに搭載された無線装置10A,10B,10C,10Dの送信優先チャネルCh1,Ch2,Ch3,Ch2を自己の受信専用チャネルとして選択する。また、無線装置10B,10C,10D,10Eは、それぞれ、無線装置10A,10B,10C,10Dの送信優先チャネルCh1,Ch2,Ch3,Ch2と異なるチャネルCh2,Ch3,Ch2,Ch3を自己の送信優先チャネルとして選択する。そして、無線装置10A〜10Eは、自己の送信優先チャネルCh1,Ch2,Ch3,Ch2,Ch3を用いて緊急情報を送信する。
(もっと読む)
携帯デバイス用固定具
【課題】従来の携帯デバイス用固定具においては、携帯デバイスの表示画面を見るために、携帯デバイスを手に持つ必要があり、両手がふさがっている場合や、手を使って携帯デバイスを持つことが困難な障害者等にとっては、表示画面を見ることができない場合があるという課題があった。
【解決手段】携帯デバイス100を固定して保持する保持部11と、保持部11の携帯デバイス100の下端側の端部である下端112、または底面114を、ユーザに当接させた状態で、前記携帯デバイス100の上方をユーザに懸架する懸架部材12と、を備えるようにした。
(もっと読む)
301 - 310 / 905
[ Back to top ]