
アイチ・マイクロ・インテリジェント株式会社により出願された特許
11 - 20 / 42
室内位置検出装置
【課題】GPSを使用することなく、端末装置の位置精度の高い室内位置検出装置を提供する。
【解決手段】周波数の異なる交流磁場を発生する少なくとも3つの磁場発生源2を有し、携帯端末内に配置される交流磁場のみを検出する3軸の高感度磁気センサ3と、姿勢検知用6軸センサ4と、磁気センサ3からの磁気ベクトル情報70から異なる周波数の磁場発生源2の周波数別の磁気ベクトル71を抽出する手段90と、前記磁気ベクトル情報71から最大磁気ベクトル情報72を演算する手段91と、前記最大磁気ベクトル情報72を鉛直座標系に変換演算する座標変換演算手段92と、座標変換後の最大磁気ベクトル情報73から位置ベクトル情報74を演算する手段93と、前記位置ベクトル情報74から距離情報75を演算する手段94と、前記距離情報75と磁場発生源2の位置情報から3角法に基づいて位置情報77を演算する手段95からなる室内位置検出装置1である。
(もっと読む)
モーションキャプチャ用のマーカ

【課題】対象物の動作を制約することなく、装備の大型化を必要とせず、かつ精度の高いモーションキャプチャ用のマーカを提供すること。
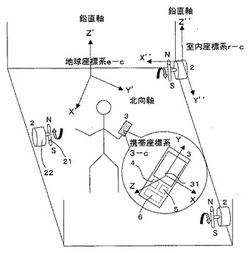
【解決手段】対象物の動作を検知するモーションキャプチャにおいて用いられ、対象物の複数の部位に取り付けられるモーションキャプチャ用のマーカ1。マーカ1は、マーカ1に固定されたマーカ座標系の互いに直交する3軸方向における地磁気ベクトルの各成分を検出する磁気センサ2と、3軸方向における、重力加速度ベクトルの各成分を検出する加速度センサ3と、磁気センサ2と加速度センサ3とが検出した検出信号を処理する信号処理部4と、信号処理部4に電力を供給する電源部5と、信号処理部4において処理された地磁気ベクトル及び重力加速度ベクトルのデータを外部の受信装置へ無線送信するための無線手段6とを備える。
(もっと読む)
室内位置検出装置
【課題】GPSを使用することなく、端末装置の位置精度の高い室内位置検出装置を提供する。
【解決手段】周波数の異なる交流磁場を発生する少なくとも3つの磁場発生源2を有し、携帯端末内に配置される交流磁場のみを検出する3軸の高感度磁気センサ3と、姿勢検知用6軸センサ4と、磁気センサ3からの磁気ベクトル情報70から異なる周波数の磁場発生源2の周波数別の磁気ベクトル71を抽出する手段90と、前記磁気ベクトル情報71から最大磁気ベクトル情報72を演算する手段91と、前記最大磁気ベクトル情報72を鉛直座標系に変換演算する座標変換演算手段92と、座標変換後の最大磁気ベクトル情報73から位置ベクトル情報74を演算する手段93と、前記位置ベクトル情報74から距離情報75を演算する手段94と、前記距離情報75と磁場発生源2の位置情報から3角法に基づいて位置情報77を演算する手段95からなる室内位置検出装置1である。
(もっと読む)
磁気式ジャイロ
【課題】計測精度に優れた小型化容易な磁気式ジャイロを提供すること。
【解決手段】被測定体に固定された3軸直交座標系における磁気ベクトルとして地磁気を検出する3軸磁気センサ2と、3軸直交座標系の原点を通る任意の回転軸を中心に上記被測定体が運動したとき、3軸磁気センサ2によって時系列的に検出される磁気ベクトルのデータを蓄積するメモリ3と、メモリ3に蓄積された異なる3時点以上の磁気ベクトルのデータを基に、回転軸を算出する回転軸算出手段4と、回転軸を中心とした被測定体の回転角度を磁気ベクトルのデータを基に算出する回転角度算出手段5と、回転軸を中心とする被測定体の瞬間的な回転角速度を算出する角速度算出手段6とを有する磁気式ジャイロ1。
(もっと読む)
磁気式ジャイロ
【課題】小型化、高密度化が進んでいる携帯電子機器等に組み込みが容易な磁気式ジャイロを提供する。
【解決手段】被測定体に固定された3軸直交座標系における磁気ベクトルとして地磁気を検出する3軸磁気センサ2、被測定体が3軸直交座標系のいずれかの直交軸を回転軸として回転運動したとき、3軸磁気センサ2によって時系列的に検出される磁気ベクトルのデータを蓄積するメモリ3と、メモリに蓄積された異なる2時点以上の磁気ベクトルのデータを基に、回転軸を判定する回転軸判定手段4と、被測定体の回転軸として判定された回転軸周りの回転角度を磁気ベクトルのデータを基に算出する回転角度算出手段5を有する磁気式ジャイロ。
(もっと読む)
異常磁気検出装置、磁気ジャイロ、電子コンパス
【課題】磁気センサに異常な磁気が作用した場合に警告を発することができる異常磁気検出装置と、それを用いた磁気ジャイロおよび電子コンパスを提供する。
【解決手段】互いに直交する3軸方向における、地磁気ベクトルの各ベクトル成分を検出する3軸磁気センサ21を備える。また、ベクトル成分から地磁気ベクトルの絶対値を算出する絶対値算出手段11を備える。また、地磁気ベクトルの絶対値から、予め定められた値よりも周波数が高い磁気高周波数成分を抽出する高周波数成分抽出手段12を備える。さらに、磁気高周波数成分が予め定められた許容範囲を超えた場合に、3軸磁気センサ21が異常な磁気を検出したと判断する磁気安定性判断手段13を備える。そして、3軸磁気センサ21が異常な磁気を検出したと判断された場合に、警告信号を出力する警告信号出力手段14を備える。
(もっと読む)
電子コンパス
【課題】ユーザが行う、携帯端末の回転操作を最小限にしつつ、方位球の中心点を補正することができ、携帯端末の内部磁界による影響を取り除いた、正確な方位を算出できる電子コンパスを提供する。
【解決手段】3軸磁気センサ3により検出された第1検出値P1と、第2検出値P2と、第3検出値P3とを含む円70の中心軸線7を算出するとともに、第1検出値P1と、第2検出値P2と、第3検出値P3とのうちいずれか1個の検出値と、円70を含む平面から外れた位置に存在する第4検出値P4とを繋ぐ直線81の中間点80を通り、該直線81に垂直な垂直二等分面8と、中心軸線7との交点を方位球6の中心点02として算出する。
(もっと読む)
携帯ナビゲーション装置
【課題】GPS電波が届かない場所でも使用でき、歩行者の現在位置を正確に表示できる携帯ナビゲーション装置1を提供する。
【解決手段】
ナビゲーション開始位置において、ユーザが進行予定方向に携帯端末3を向けて方向設定ボタンを押圧する進行方向設定操作を受け付けて、その操作時における携帯端末3の方位をユーザの進行予定方向として記憶する進行方向記憶手段32aを備える。また、保持状態における、携帯端末3が向く方位を携帯保持方向として記憶する保持方向記憶手段32bを備える。さらに、ユーザの歩数を検出する歩数検出手段21を備える。また、進行予定方向と携帯保持方向との関係から、ユーザの進行方向を検出する進行方向検出手段23を備える。そして、予め記憶されたユーザの歩幅と、歩数と、ユーザの進行方向とから、ユーザの現在位置を算出し、地図情報とともに表示する。
(もっと読む)
電子コンパス
【課題】ピッチ角θが90°以上になった場合でも方位が反転しない電子コンパスを提供する。
【解決手段】携帯端末2の操作面20に垂直な方向を向くZ軸と、携帯端末2の横幅方向を向くX軸と、上記X軸とZ軸との双方に直交するY軸との3軸方向における、地磁気ベクトルMの各成分を検出する3軸磁気センサ21を備える。また、上記3軸方向における、重力加速度ベクトルGの各成分を検出する3軸加速度センサ22を備える。さらに、携帯端末2が向く方位を測定方位として算出する方位算出手段5を備える。方位算出手段5は、X軸に平行で操作面20の左側から右側へ向かう右向X軸ベクトルを地球座標系の水平面6に投影し、さらに地球座標系の鉛直線を中心に下向き矢視にて反時計回りに90°回転させた回転投影ベクトル4が向く方向を上記測定方位として算出する。
(もっと読む)
歩数計
【課題】検出したX、Y、Zの3軸加速度センサの加速度信号から歩行に対応する精確な歩行加速度を抽出する。これにより、精度よく歩数を計数できる、小規模なシステム構成で消費電力の少ない歩数計を実現する。
【解決手段】3軸加速度センサ20と、絶対値演算手段31による3軸加速度センサ20の出力信号のベクトルの絶対値を第1の低周波フィルタ手段および第1の低周波フィルタ手段よりも低い周波数成分を通過させる第2の低周波フィルタ手段に入力し、差動演算手段34による前記第1および第2の低周波フィルタ手段のそれぞれの出力信号の差から、歩行に対応する精確な動加速度信号を求める。これにより簡単なシステム構成で精度の良い歩数計10を実現する。
(もっと読む)
11 - 20 / 42
[ Back to top ]