
ナヴコム テクノロジー インコーポレイテッドにより出願された特許
21 - 28 / 28
キャリア−位相測定値の連続差を用いたGPSナビゲーション
本発明は、計算の複雑度を最低限に抑えつつ、高精度の位置更新を生成する頻度を大幅に高める衛星ナビゲーション技法を提供する。本発明は、キャリア−位相測定値の連続的変化を用いて、物体の位置を時間的に前方に伝搬することによって、衛星からの信号に応じて物体をナビゲートするプロセスを含む。このプロセスは、物体の位置について解明するために必要な行列を低頻度で計算し、次の低頻度計算が完了するまで、最後に計算した行列を繰り返し用いて、高頻度で位置更新を計算する。 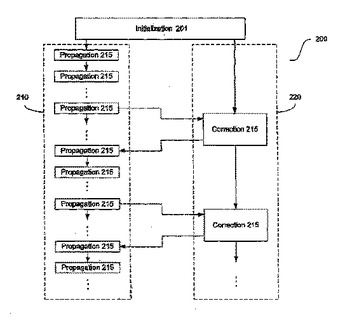 (もっと読む)
(もっと読む)
2周波数の一方で測定データが利用できない場合に短期間バックアップ2周波数ナビゲーションを行なう方法
本発明は、2周波数ナビゲーションが依存する2周波数の一方が利用できない場合に、短期間バックアップ2周波数ナビゲーションを実行する方法を含んでいる。本方法は、維持されている周波数上の搬送波位相測定値および電離層屈折効果のモデルを用いて、利用できない周波数上の符号および搬送波位相測定値を合成して、両方の周波数上の測定値が利用できる場合に更新するステップを含んでいる。 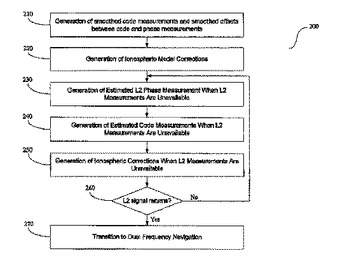 (もっと読む)
(もっと読む)
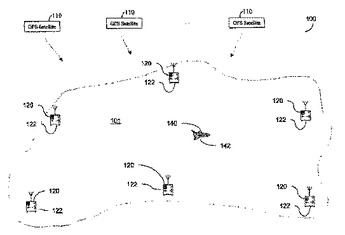
ローカルRTKシステムと、地域、広域、またはグローバル搬送波位相測位システムを組み合わせて利用する方法
本発明は、ローカルRTKシステムと、地域、広域、またはグローバル差分搬送波位相測位システム(WADGPS)を組み合わせて利用する方法を含んでおり、別個に利用された際にRTKおよびWADGPSナビゲーション技術に付随する短所が回避される。本方法には、静止しているユーザー受信器の既知の位置を用いるか、あるいはユーザー受信器が移動中である場合、RTKシステムを用いてWADGPSシステムにおける浮動バイアス値を初期化することを含んでいる。その後で、ユーザーGPS受信器において取得された屈折補正された搬送波位相測定値が、対応する初期浮動バイアス値を含めることにより調整され、後続の処理において浮動バイアス値が周知の(分散が小さい)として扱われてWADGPSシステム内でユーザー受信器を測位する。
 (もっと読む)
(もっと読む)
広域またはグローバルディファレンシャルGPSシステムのためのクロック補正値を生成するための方法
WADGPSネットワークのための衛星クロック補正値を生成するための方法は、他の実質的な誤差成分を除去した後に、衛星クロック補正値を計算する。電離層屈折影響により引き起こされる誤差は、二周波数GPS測定値を使用して、基準局で取得されるGPS測定値から取り除かれる。マルチパス雑音は、キャリア−位相測定値を用いるGPS擬似距離コード測定値の平滑化により取り除かれる。対流圏屈折影響は、モデル化によって大部分は取り除くことができ、所望される場合、クロック補正値の計算に含まれる小さな確率論的な調整を使用することにより改善できる。前記誤差要因を取り除いた後に、個別基準局について衛星クロック補正値が計算される。そして、衛星を見ることができる基準局に関して衛星クロック補正値の平均または加重平均を取ることにより、複数の衛星のそれぞれに平均クロック補正値が形成される。
 (もっと読む)
(もっと読む)
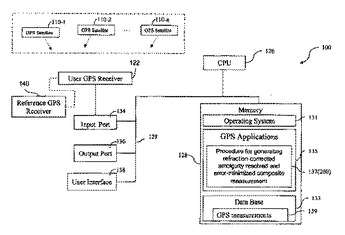
3個のGPS周波数を用いて搬送波位相の整数値バイアスを解決する方法
本発明は、アンビギュイティが解消され、屈折が補正され、且つノイズが最小化された搬送波位相測定値を生成する方法を含んでいる。本方法は、L1、L2およびL5周波数におけるGPS搬送波位相測定値を用いて第1の合成測定値を形成するステップを含んでいる。第1の合成測定値におけるノイズを減らすべく、本方法は更に、3種のGPS搬送周波数のうち少なくとも2種におけるGPS搬送波位相測定値を用いて第2の合成測定値を形成するステップを含んでいる。第2の合成測定値は、内在するマルチパス・ノイズが小さくなるように形成されるため、これを用いて第1の合成測定値を平滑化して、マルチパス・ノイズを最小化することができる。
 (もっと読む)
(もっと読む)
受信機自動インテグリティ監視、並びに故障検出及び除去の方法
GPS受信機で考慮される複数の衛星に関してGPS受信機により得られる複数のGPS測定結果の中から、不完全な測定結果を検出し識別する方法は、複数のGPS測定結果が不完全な測定結果を含むかどうかを判断する。複数のGPS測定結果が不完全な測定結果を含むという判断に応じて、該方法は、複数の衛星の各々に関連する相関値を計算すること、及び不完全なGPS測定結果の原因となっている衛星として最高の相関値に関連する衛星を選定することにより、不完全な測定結果の原因となっている衛星を識別する。
 (もっと読む)
(もっと読む)
合成開口レーダシステム及び局所的な測位のための方法
測位システムは、固定された位置にあるパッシブな等方性反射標識と、デバイスとを含む。前記デバイスは、ある期間に渡って、円偏波を有する電磁パルスを送信し、帰還信号を受信する。前記帰還信号は、前記反射標識から反射されたパルスを含む。前記帰還信号から前記反射パルスを隔離するため、及び前記デバイスから前記反射標識への距離を決定するために、前記帰還信号を処理する。前記反射標識は、第1のパッシブ反射体と、第2のパッシブ反射体と、前記第1のパッシブ反射体を基準にした角度で前記第2のパッシブ反射体を静止して測位するように構成される静的構造とを含む。オプションとして、前記デバイスは、前記帰還信号を受信中に、ある特定の方向に移動し、前記帰還信号の前記反射パルス部分におけるドップラーシフトを検出し、前記特定の方向と、前記デバイスと前記標識間の直線との間の角度を決定する。
 (もっと読む)
(もっと読む)
ローカル測位のための双方向RF測距システム及び方法
測位システムは、RF信号を交換するように構成された複数のデバイスを含む。第1のデバイスは、他の各々のデバイスからそれに割り当てられたタイムスロット中で周期的にメッセージを受信する。この受信されたメッセージは、第1のデバイスから送信されたそれぞれのメッセージの他のデバイスにおける到達時間を表す情報を含む。他の各々のデバイスからのメッセージの到達時間は、第1のデバイスによって測定される。第1のデバイスは、周期的にメッセージを他のデバイスに送信するが、送信された各々のメッセージには、他のデバイスの内の少なくとも1つのデバイスに対する測定到達時間を表す情報が含まれている。第1のデバイスから複数の他のデバイスの各々への距離は、他のデバイスからのメッセージの測定された到達時間と他のデバイスからのメッセージ中の到達時間情報との関数として決定される。 (もっと読む)
21 - 28 / 28
[ Back to top ]