
テレ アトラス ベスローテン フエンノートシャップにより出願された特許
11 - 20 / 23
画像センサデータに距離センサデータをマッピングする方法及び装置
第1の距離センサ(3(1))からの第1の距離センサデータをカメラ(9(j))からの画像データにマッピングする方法及び装置。当該方法は、モバイル・システムに搭載された位置判定装置からの時間データ及び位置データと、モバイル・システムに搭載された少なくとも第1の距離センサ(3(1))からの第1の距離センサデータと、前記モバイル・システムに搭載された少なくとも1つのカメラ(9(j))からの画像データとを受信する工程と、第1の距離センサデータ内で、少なくとも1つの物体に関連する第1の点群を識別する工程と、第1の点群に基づいて物体に関連するマスクを生成する工程と、少なくとも1つのカメラ(9(j))からの画像データ内に存在するのと同一の物体に関連する物体画像データ上に、マスクをマッピングする工程と、物体画像データの少なくとも一部分に対して、予め定められた画像処理技術を実行する工程とを含む。  (もっと読む)
(もっと読む)
地図データベースにおいて使用するために、表面に渡る基準線に沿う線形特徴を取り込む方法
【課題】
【解決手段】
地図データベースにおいて使用するために、表面に渡る基準線に沿う線形特徴を作成する方法が開示される。方法は、地理座標参照系における前記基準線の座標を表す基準線データと、前記基準線に隣接する表面のソース画像と、前記地理座標参照系における関連する位置及び姿勢データとから基準線参照データセットを生成するステップと、地図データベースにおいて使用するために、基準線に沿う線形特徴及び地理座標参照系における関連する場所を作成するために基準線参照データセットを後処理するステップとを含み、基準線参照データセットは、画素を有する画像データの複数の集合と地理座標参照系において表面に渡る基準線を定義する関連データとを含み、画像データの集合が地理座標参照系における表面の線区分のオルソ補正図表現に対応し、画像データの各集合が基準線上の位置に関連付けられる基準画素を含み、各画素が線区分に沿う基準画素の位置から所定の距離に存在する位置を有する表面を表し、線区分が基準画素に関連する位置において基準線と垂直に交差する。  (もっと読む)
(もっと読む)
位置を判定する方法及び装置
本発明は、絶対位置決めシステムの一部である複数の送信機(SA1、SA2)から信号を受信する受信装置(AN)を含む位置決め装置(PD)に関する。位置装置は、各送信機(SA1、SA2)の送信機位置を判定し且つ先に判定した位置、各送信機位置及びマルチパス情報に基づいて信号の直接受信が可能である送信機(SA1、SA2)を計算するように更に構成される。位置決め装置は、位置を判定するように更に構成される。  (もっと読む)
(もっと読む)
多視点パノラマを生成する方法及び装置
ロードサイドの多視点パノラマを生成する方法が開示される。方法は、移動車両上に装着された少なくとも1つの地上レーザスキャナにより取得され、各々が位置データ及び方向データと関連付けられるレーザスキャンサンプルのセットを得ることと、少なくとも1つの画像シーケンスを得ることであり、各画像シーケンスは移動車両上に装着された地上カメラを使用して取得され、少なくとも1つの画像シーケンスの各画像は位置データ及び方向データと関連付けられる少なくとも1つの画像シーケンスを得ることと、レーザスキャンサンプルのセットから表面を導き出すこと及びレーザスキャンサンプルと関連付けられる位置データに依存して前記表面の場所を決定することと、表面の場所、並びに各画像と関連付けられる位置データ及び方向データに依存して、少なくとも1つの画像シーケンスから前記表面に対する多視点パノラマを生成することとを含む。  (もっと読む)
(もっと読む)
絶対位置決めモード及び相対位置決めモードを含む位置決め装置、方法、並びにプログラム
本発明は、絶対位置決めシステム及び相対位置決めシステムを使用して位置を判定するように構成される位置決め装置(PD)に関する。位置決め装置は、絶対位置決めシステム及び場合によっては相対位置決めシステムを使用して位置を判定する第1のモード、並びに相対位置決めシステム及び場合によっては絶対位置決めシステムを使用して位置を判定する第2のモードで動作するように構成される。絶対位置決めシステムは、第2のモードにおいてよりも第1のモードにおいてより重点を置かれ、位置決め装置は、第1のモードから第2のモードに切り替えるように構成される。位置決め装置(PD)はデジタル地図データベース(DMD、3DMD)へのアクセスが可能であり、第1のモードから第2のモードへの切り替えは、地図データベース(DMD、3DMD)に格納された情報と組み合わせて、少なくとも判定された位置に基づいて決定される。 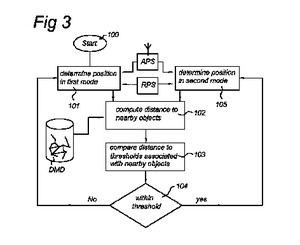 (もっと読む)
(もっと読む)
道路情報を生成する方法及び装置
本発明は、地図データベースにおいて使用するための道路情報を生成する方法に関する。方法は、移動車両に搭載される地上カメラを使用して取得される画像シーケンスから元画像を取得することと、移動車両の前方又は後方の路面を表す元画像の事前定義済み領域と関連付けられる画素から道路色サンプルを判定することと、道路色サンプルに依存して元画像から路面画像を生成することと、路面画像、並びに元画像と関連付けられる位置及び姿勢データに依存して道路情報を生成することとを有することを特徴とする。  (もっと読む)
(もっと読む)
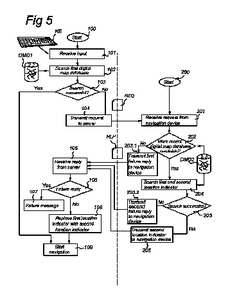
デジタル地図データベースにおいて場所を判定する方法、ナビゲーション装置及びサーバ
【課題】
【解決手段】
本発明は、クエリに基づいて第1のデジタル地図データベースにおいて場所を判定する方法に関する。方法は、第1のデジタル地図データベースに含まれない第1の場所に対するクエリを含む要求を受信することを含む。方法は、第2のデジタル地図データベースにおいて第1の場所を探索するステップと、第1の場所が第2のデジタル地図データベースにおいて発見される場合に第1の場所に近接し且つ第1のデジタル地図データベースに含まれる第2の場所を探索するステップとを含む。
(もっと読む)
2次元及び3次元の正確な場所及び方位を判定する装置及び方法

a)軌道に沿って移動した際に地上の乗物に搭載された全地球測位システムにより採られた全地球測位システムのサンプルを取得する動作と、b)全地球測位システムのサンプルに基づいて軌道の第1の推定値を取得する動作と、c)軌道に沿って移動した際に地上の乗物に搭載された慣性測定ユニットにより測定された測定値に少なくとも基づいて、軌道の第2の推定値を取得する動作と、d)第1の推定値と第2の推定値とを比較する動作と、e)第2の推定値と比較して所定の閾値を上回る変動を第1の推定値が示す場所を確立する動作と、f)このような場所を確立できない場合に動作j)に続き、確立できる場合に動作g)に続き、g)大きい変動である場所に関連付けられた全地球測位システムのサンプルを不正確な全地球測位システムのサンプルであるとして除去し、それにより、残った全地球測位システムのサンプルの集合を形成する動作と、h)残った全地球測位システムのサンプルに基づいて軌道の第1の推定を再び計算し、第2の推定を再び計算する動作と、i)動作d)から動作h)を繰り返す動作と、j)動作群を終了する動作とに従って、GPSサンプルの集合の中の不正確なGPSサンプルを判定する方法及び装置。 (もっと読む)
地上モバイルマッピングデータからオブジェクトを検出する方法及び装置
本発明は、地上モバイルマッピングデータからオブジェクトを検出する方法に関する。この場合、地上モバイルマッピングデータは、道路を走行する走行方向を有する地上モバイルマッピング車両により取り込まれており、モバイルマッピングデータは、レーザスキャナデータ、少なくとも1つのカメラにより取得されるソース画像、並びに車両の位置データ及び方位データを含み、レーザスキャナデータは、各々が関連する位置データ及び方位データを有するレーザポイントを含み、各ソース画像は、関連する位置データ及び方位データを含む。方法は、車両の位置及び方位を検索することと、注目領域に対応するレーザポイントを取得するため、車両の位置及び方位に依存してレーザスキャナデータをフィルタリングすることと、車両の位置及び方位と関連するソース画像を検索することと、認識マスクを生成するため、注目領域に対応するレーザポイントをソース画像の画像座標にマッピングすることと、注目領域内の可能なオブジェクトを表す候補3D画像を取得するため、認識マスク及びソース画像を組み合わせることと、候補3D画像からオブジェクトグループを検出することとを含むことを特徴とする。画像認識及びレーザスキャナ認識を組み合わせることにより、検出率は非常に高い割合まで増加可能であり、そのため歩行者の労力を大幅に減少する。更に、レーザデータにおいて注目領域を生成することにより、画像内のオブジェクトを検出するために必要な処理能力及び/又は処理時間を大幅に減少できる。  (もっと読む)
(もっと読む)
画像内の平面オブジェクトを識別し且つ位置判定する方法及び装置
本発明は、ソース画像内の平面オブジェクトを識別する方法に関する。方法は、第1の地上カメラにより取得される第1のソース画像を検索することと、第2の地上カメラにより取得される第2のソース画像を検索することと、第1のソース画像及び第2のソース画像と関連する位置データを検索することと、第1のソース画像及び第2のソース画像と関連する方位データを検索することと、同一の観察軸を有する第1の中間画像及び第2の中間画像を取得するため、関連する位置データ及び関連する方位データにより観察軸回転変換を第1のソース画像及び第2のソース画像に対して実行することと、第1のラジアル対数データ画像及び第2のラジアル対数データ画像を取得するため、ラジアル対数空間変換を第1の中間画像及び第2の中間画像に対して実行することと、平面オブジェクトである可能性のある第1の画像内の領域を検出することと、第2のラジアル対数データ画像内の同様の寸法を有する前記潜在平面オブジェクト及び同様のrgb特性を比較することと、最後に領域を平面オブジェクトとして識別し且つその位置を判定することとを有することを特徴とする。本方法により、技術者は後続画像内の平面垂直オブジェクトを非常に効率的に検出できる。  (もっと読む)
(もっと読む)
11 - 20 / 23
[ Back to top ]