
ミツビシ・エレクトリック・リサーチ・ラボラトリーズ・インコーポレイテッドにより出願された特許
51 - 60 / 484
エレベータシステムにおけるかごの横方向の動きを低減するシステムおよび方法
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
多入力多出力ワイヤレスローカルエリアネットワークにおいてアンテナを選択するための方法

【課題】多入力多出力ワイヤレスローカルエリアネットワークにおいてアンテナを選択するための方法を提供する。
【解決手段】コンピュータによって実施される方法は、複数の局を含む多入力多出力ワイヤレスローカルエリアネットワークにおいてアンテナを選択する。各局は、アンテナのセットを含む。連続して送信された複数のサウンディングパケットが局で受信される。各サウンディングパケットは、アンテナのセットの異なるサブセットに対応する。連続して送信された複数のサウンディングパケットから、チャネル行列が推定される。アンテナのサブセットが、チャネル行列に従って選択される。
(もっと読む)
識別器を特定のシーン内のオブジェクトを検出するように適応させるためのシステム及び方法

【課題】汎用識別器を、特定のシーン、この識別器がトレーニングされたときには未知であるか又は利用可能でなかった特定のシーンに適応させることができるトレーニング方法を提供する。
【解決手段】汎用識別器が、特定のシーン内のオブジェクトを検出するように適応される。特定のシーンは識別器が汎用トレーニングデータを用いてトレーニングされたときに未知であった。カメラが、特定のシーンのフレームのビデオを取得する。ビデオ内のフレームを用いて特定のシーンモデルのモデルが構築される。識別器はモデルに適用され、負の例が選択される。そして、新たな負の例がトレーニングデータに付加される一方で、不確実性基準に基づいて、トレーニングデータから既存の負の例の別のセットが除去される。選択された正の例もトレーニングデータに付加され、識別器はシーン固有の識別器を得るための所望の精度レベルに達するまで再トレーニングされる。
(もっと読む)
テスト画像内のオブジェクトを分類するための方法
【課題】画像内のオブジェクトを検出するための方法を提供する。
【解決手段】オブジェクトを検出するための識別器が、トレーニング画像のセットから構築される。トレーニング画像毎に、トレーニング画像内のウィンドウから特徴が抽出される。該ウィンドウはオブジェクトを含む。次に、特徴の係数cをランダムにサンプリングする。係数の可能なセット毎にn連結が求められる。係数の可能な連結毎に、関係演算子を用いてブール値命題が求められ、命題空間が生成される。命題空間にブール演算子の連結関数を適用することによって識別器の複合仮説が定義され、命題空間内の全ての可能な命題が構築される。次に、テスト画像内の特徴に識別器の複合仮説を適用して、テスト画像がオブジェクトを含むか否かを検出する。
(もっと読む)
計画に基づいた医用画像レジストレーションのための方法
【課題】本方法は、患者を放射線ビームに位置合わせするときの誤差を求める。
【解決手段】治療計画中に計画容積Vが取得され、治療中に治療容積Iが取得される。座標変換Tによって位置合わせされることになる前記計画容積および前記治療容積内の点r毎に、重み付けされた誤差WEが、重み付け関数W(r)によって重み付けされた、前記計画容積および前記治療容積に適用される目的関数F(r,T)を用いて
のように最小にされ、ここで、W(r)はターゲット重みWT、リスク組織重みWR、および送達線量重みWDの関数である。
(もっと読む)
ビーム群により送達される放射線量を最適化する方法および装置
放射線量は、正規化された形態のビーム群のモデルおよび標的線量を提供することにより、最適化される。グラム行列がモデルから決定される。標的線量がサブサンプリングされて、ビーム群の初期強度値が決定される。次に、以下のステップが、収束するまで繰り返される。非常に小さな正の値0<ε<<1を各強度値に加算して、強度値がゼロよりも大きいことを保証する。各強度値にグラム行列を乗算して、積を求め、積を要素毎に除算して正規化された標的線量にし、対応する比率を求める。比率が、数値許容誤差内ですべて1に近い場合、ビーム群の初期値を出力する。そうでない場合、次の反復前に、強度値に比率を乗算される。 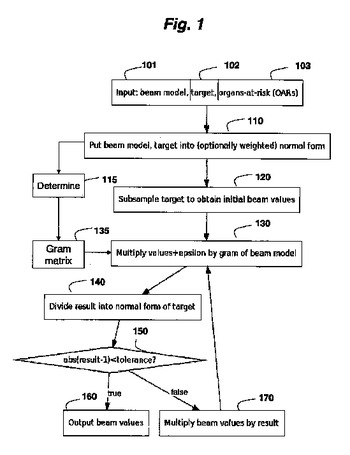 (もっと読む)
(もっと読む)
物体に対するプローブの姿勢を、該プローブを用いて該物体をプロービングすることによって求めるための方法およびシステム
【課題】物体に対するプローブの姿勢を、プローブを用いて物体をプロービングすることによって求めるためのシステム及び方法を提供する。
【解決手段】ラオ・ブラックウェル化パーティクルフィルタリングを使用して姿勢の確率を求めるステップであって、姿勢のロケーションの確率が前記パーティクルのロケーション212によって表され、姿勢の配向の確率が、各パーティクルのロケーションを条件とするパーティクルの配向にわたるガウス分布215によって表され、姿勢の確率が特定の姿勢の周りに集中するまで、後続のプロービングごとに実行されるステップと、特定の姿勢に基づいて物体に対するプローブの姿勢を推定するステップとを含む。
(もっと読む)
マルチクラス分類器をトレーニングするための方法
【課題】ユーザーからのイエス/ノーフィードバックのみを必要とするマルチクラス分類器をトレーニングするための方法を提供する。
【解決手段】マルチクラス分類器が、分類器によって求められるメンバーシップ確率に基づいて、1組のアクティブ画像から1つの問い合わせ画像を選択することによってトレーニングされ、問い合わせ画像のメンバーシップ確率に基づいて、1組のトレーニング画像から1つのサンプル画像が選択される。問い合わせ画像及びサンプル画像は、出力デバイスにおいてユーザーに対して表示され、ユーザーからの応答は、イエス照合又はノー照合である。イエス照合が得られた場合には、サンプル画像のラベルと共に問い合わせ画像はトレーニングセットに追加され、そうでない場合には、マルチクラス分類器を得るために所定の数のノー照合に達するまで、選択するステップ、表示するステップ及び得るステップを繰り返す。
(もっと読む)
物体クラスからの物体の新たな画像を合成するための方法
【課題】カメラによって取得された画像又は合成的に生成された画像において、顔のような既知の物体クラスからの物体の画像を再照明する。
【解決手段】最初に、物体クラスからの様々なトレーニング物体の反射フィールドを得ることによって既知の物体クラスからの物体の画像が合成される。反射フィールドモデルは、トレーニング物体の反射フィールドの結合を使用して、物体クラスについて定義される。反射フィールドモデルのパラメーターは最適化されて、特定の物体の1つ又は複数の入力画像に基づいて物体クラスからの特定の物体の特定の反射フィールドが推定される。その特定の反射フィールドは、その特定の物体に適合され、次に、適合した後の、特定の適合された反射フィールドモデルの照射パラメーターを変更することによって、その特定の物体の新たな画像が合成される。
(もっと読む)
ステレオ画像においてオクルージョンをハンドリングするための方法
【課題】オクルージョンをハンドリングするための新規の方法を提供する。
【解決手段】オクルードされたピクセル及び可視ピクセルを含むステレオ画像において、オクルージョンは、まず、前記オクルードされたピクセルについて、初期サポート関数と、オクルージョンマップと、前記ステレオ画像内の前記オクルードされたピクセルの近傍の前記可視ピクセルの視差とを使用して、初期視差値及び該初期視差値のサポートを求めることによってハンドリングされる。次に、前記オクルードされたピクセルについて、反復的なサポート及び決定プロセスにおいて、初期視差値と、最終サポート関数と、正規化関数とを使用して、最終視差値及び該最終視差値のサポートが求められる。
(もっと読む)
51 - 60 / 484
[ Back to top ]