
クボテック株式会社により出願された特許
1 - 3 / 3
3次元仮想空間を利用した感知装置のリアルタイム状態把握、制御の方法
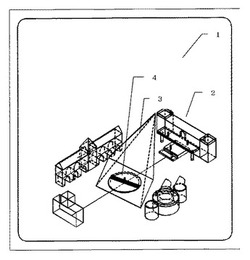
【課題】 感知装置がどのように配置され、どこを感知しようとしているかが不明なため、監視、観察者は、感知された情報から現場の状態を把握するのが難しい。多数の感知装置が設置されればされる程、その難しさは増加する。また、感知装置付近を見るビデオカメラが設置されている場合でも、そのビデオカメラが現場の3次元空間のどこを撮影しているのかの情報が無いため、どこで発生している現象なのか判断がつかない。
【解決手段】 3次元CAD上に、撮影現場の3次元モデルを用意し、仮想3次元空間を表現する。そこに感知装置の位置、感知領域、動作状態を表現する幾何形状立体、及び、ビデオカメラの視線、画角を表現する4角錐の立体を、リアルタイムで、感知装置の状態とビデオカメラの動きに合わせて表示する。感知装置の状態に同期させて、ビデオカメラの撮影場所を決め、撮影する。
(もっと読む)
3次元仮想空間を利用したビデオカメラのリアルタイム状態把握、制御の方法

【課題】ビデオカメラの撮影現場と離れて映像を見る場合、ビデオカメラが、どこからどこを見ているのかがはっきりしない。複数のビデオカメラで視線を振る場合は、さらに映像から撮影現場を把握するのは困難となる。また、現場の撮影したい場所をビデオカメラに容易に指示する方法がない。また、撮影場所の自動巡回の指示も困難である。ズームを大きくすると映像がどこを見ているのかを理解するのが難しくなる。
【解決手段】3次元CAD上に、撮影現場の3次元モデルを用意し、仮想3次元空間を表現する。そこにビデオカメラの視線、画角を表現する4角錐の立体を、リアルタイムでビデオカメラの動きと合わせて表示する。仮想3次元空間内を直接指示し、ビデオカメラの撮影場所を指定する。3次元モデルの幾何干渉計算で、不可視場所を知る。実映像と同じ立体感、遠近感の仮想3次元透視図を実映像の後ろに大きく背景映像として表示し、実映像を補佐する。
(もっと読む)
研磨装置及び方法
【課題】研磨テープから砥粒や研磨層の一部をパネルの表面に脱落させず、より短時間でパネルの表面にある突起を研磨できる装置を提供することである。
【解決手段】基板11に取り付けた一個又は二個以上のセンサープローブ16、17がパネルの表面にある突起の高さを測定する。研磨テープ30をパネルの表面に押し付けるためのヘッド部材22を有する研磨ヘッド20が、Z方向に移動可能に基板11に取り付けられる。センサープローブ16、17は、ヘッド部材22からみて、ヘッド部材22上にある研磨テープ30の幅方向の側に位置する。好適に、研磨装置10は二個のセンサープローブ16、17を有し、これら二個のセンサープローブ16、17は、ヘッド部材22からみて、ヘッド部材22上にある研磨テープ30の幅方向の両方の側に、それぞれ一個ずつヘッド部材22を挟むように位置する。
(もっと読む)
1 - 3 / 3
[ Back to top ]