
Fターム[2B041DA08]の内容
農業機械一般(連結、尾輪、PTO等) (4,416) | 位置調整装置(尾輪等)の種類 (51) | 高さ調整用 (43) | そり式 (5)
Fターム[2B041DA08]に分類される特許
1 - 5 / 5
歩行型作業機
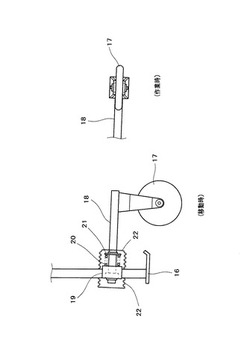
【課題】耕耘部の後方にアタッチメントを装着して行う作業において、移動用の尾輪体とアタッチメントが干渉してしまうという問題を解消する。
【解決手段】機体走行に伴って土壌を耕耘する耕耘部6に、接地により耕耘部6の耕深を調節する尾ソリ16などの接地部材を備える歩行型作業機1において、尾ソリ16に、非作業移動時に耕耘部6を土壌面又は路面から浮かせる移動用の尾輪体17を取り付けると共に、該尾輪体17の姿勢を、尾ソリ16の下端よりも下方に突出する作用姿勢と、尾ソリ16の下端よりも上方に退避する非作用姿勢とに切換可能にするにあたり、尾輪体17を、前後を向く回動軸心(回動軸18)を中心とする回動によって、作用姿勢と非作用姿勢とに切換える。
(もっと読む)
ゲージ輪構造

【課題】ロータリ整形機に適用されるゲージ輪構造であって、畦の脇の平坦性を向上させ得る構造簡単なゲージ輪構造を提供する。
【解決手段】ロータリ整形機400に適用されるゲージ輪構造500は、ゲージ輪フレーム462と、ゲージ輪アーム463と、ゲージ輪464と、整地板466とを備え、ゲージ輪464が接地している状態において、整地板466の少なくとも一部が該整地板466の自重によってゲージ輪464の接地面Sに接地するように構成されている。
(もっと読む)
中耕除草機
【課題】一定の耕深を保って中耕を行う。
【解決手段】中耕除草機10は、トラクタ100後部の3点リンク機構205に連結するための連結機構70と、圃場の中耕を行う中耕機構30と、連結機構70と中耕機構30とを支持するフレーム機構120と、中耕機構30よりも機体進行方向前方のフレーム機構120に設けられ、未中耕の土壌表面Gに対する検出機構支持フレーム230下面の高さHaを検出する高さ検出機構220と、高さ検出機構220によって検出された高さHaを、トラクタ100の昇降調整機構216に伝達する高さ伝達機構240と、を備える。
(もっと読む)
除草機
【課題】 機体全体の大型化及びコストアップを招くことなく、株元部分の除草位置及び除草範囲を簡単かつ容易に調節して常に適確良好な除草効果を発揮できるようにする。
【解決手段】 乗用走行機体4に昇降自在に連結された前後方向に長いフレーム22に接地ソリ23と、植付け条における株間に左右側方から作用するタイン24を前後複数に並設した株間除草手段10Aと、条間除草手段10Bとを取り付けてなる除草機であって、複数のタイン24を、左右方向に位置変更固定自在で、かつ、フレーム22に対する前後方向の傾斜角度変更固定自在に構成している。
(もっと読む)
歩行型農作業機
【課題】耕耘装置等の耕耘深さを設定する共に機体の後部を支えるための接地体を備えた歩行型農作業機において、前記接地体の耕耘土壌に対する埋没抵抗を軽減させて機体の旋回操作を容易にする。
【解決手段】機体の操向方向を検出する操向方向検出手段32L,32Rを設けると共に、該操向方向検出手段32L,32Rによって検出した機体の操向方向に、前記接地体25,26を自動的に追従させる接地体追従手段35を設け、機体旋回時における当該接地体25,26の耕耘土壌に対する埋没抵抗を低減できるようにした。
(もっと読む)
1 - 5 / 5
[ Back to top ]