
Fターム[2B041HA06]の内容
農業機械一般(連結、尾輪、PTO等) (4,416) | 連結、PTO、尾輪等の制御 (292) | 検出(入力信号) (77) | 車両又は作業機の状況 (77) | 車両又は作業機の傾斜 (6)
Fターム[2B041HA06]に分類される特許
1 - 6 / 6
作業機
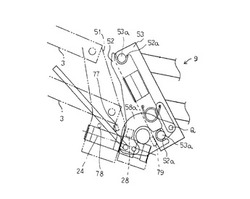
【課題】 本発明の課題は、昇降及び左右ローリング可能な縦リンクに対して着脱される作業部を取り外したときには、この縦リンクの左右傾斜姿勢が常に左右水平姿勢となるようローリング制御することによって作業部の装着を容易にし、且つ作業部の縦リンク対する着脱作業の安全化を図る。
【解決手段】 本発明は、走行車体の後側に昇降用油圧シリンダにより作動する昇降リンク装置(3)及びローリングアクチュエータにより作動するローリング装置を介して縦リンク(51)を昇降可能及び左右ローリング可能に設ける。縦リンク(51)に着脱される着脱ヒッチ(53)を介して作業部を装着する。取り外し状態検出装置(79)により作業部を取り外した状態であることを検出したとき、ローリング装置を所定の標準状態に作動させる制御装置を設ける。
(もっと読む)
耕耘機

【課題】本発明は、旋回に係る操作性を大幅に高めることができる耕耘機を提供することを課題とする。
【解決手段】耕耘機10は、機体11にエンジン12を備え、このエンジン12から耕耘爪14に駆動力を断接するクラッチ22を備え、機体11に機体11の傾き角度を検出する傾斜角検出センサ20を備え、クラッチ22が接続されているとのクラッチスイッチ の情報を受け、機体11の傾き角度が水平面に対して所定角度範囲内にあるという傾斜角検出センサ20の情報を受けたときにエンジン12の回転速度を高速になるように制御する制御部57を備えている。
(もっと読む)
農用トラクタ
【課題】インプルメントをトラクタ本機の走行速度に対応して作動制御することができるのみならず、インプルメント制御用信号によりPTO動力の出力状態を認識できるようにする。
【解決手段】トラクタ本機1に備えた主制御装置16に、トラクタ本機1の走行速度Vの大きさに対応したインプルメント制御用信号Eを出力する出力手段と、PTO検出センサ14からの検出に基づいてインプルメント制御用信号Eを補正する出力補正手段とを備えてある。
(もっと読む)
作業車のPTOクラッチ操作構造
【課題】 作業車のPTOクラッチ操作構造において、昇降レバー及びポジション制御手段を備えた場合、作業装置の昇降駆動に応じてPTOクラッチを適切に伝動及び遮断状態に操作することができるように構成する。
【解決手段】 所定範囲A1に亘って人為的に操作される昇降レバー12を備えて、ポジション制御手段を備える。所定範囲A1の上限位置A3よりも下降側にPTO切換位置A4,A5を設定する。昇降レバー12がPTO切換位置A4,A5よりも下降側に位置すると、PTOクラッチ29を伝動状態に操作し、昇降レバー12がPTO切換位置A4,A5よりも上昇側に位置すると、PTOクラッチ29を遮断状態に操作する。
(もっと読む)
トラクタの作業機連結装置
【課題】2Pリンクから3Pリンクへの切り替えに際し、2P回動ブラケットを90度転回させることで、左右に突設するピンが邪魔にならないように上下方向に変位させてミッションケースの左右幅内に収納固定し、2Pから3Pへの切り替え容易化並びに作業機の充分なる昇降幅の確保を図る。
【解決手段】 本発明は、2Pリンク(10)から3Pリンク(20)への切り替え時には、左右にピン(12),(12)を突設する前後方向の軸芯(Q)回りに回動可能な回動ブラケット(11)を90度反転させてミッションケース(1)の左右幅内に収納固定する。本機側に設けたロアリンク装着用ピン部材(23)にロアリンクを装着して3Pに切り替える。
(もっと読む)
作業機装着装置
【課題】 水平姿勢を維持するのが好ましいブロードキャスタ等の作業機を三点リンクヒッチ機構を介してトラクタに連結した場合に、三点リンクヒッチ機構を上下動させても作業機が一定の姿勢を保つようにする。
【解決手段】 トラクタ1に三点リンクヒッチ機構3を介して上下揺動自在に装着される支持フレーム16を備え、この支持フレーム16に直装式作業機1が取り付けられる取付フレーム17を枢軸25を介して左右軸回りに回動自在に枢支連結し、前記三点リンクヒッチ機構3を上下動させても作業機1が一定の姿勢を保つように取付フレーム17を前記枢軸25回りに回動させるためのアクチュエータ18を設ける。
(もっと読む)
1 - 6 / 6
[ Back to top ]