
Fターム[2B043BB13]の内容
農業機械一般(操向) (6,001) | 農業機械の作業別の種類 (591) | 収穫機 (137) | 刈取機又はバインダ (3)
Fターム[2B043BB13]に分類される特許
1 - 3 / 3
作業車
【課題】旋回操作の自由度が高く実用性が高い作業車を提供する。
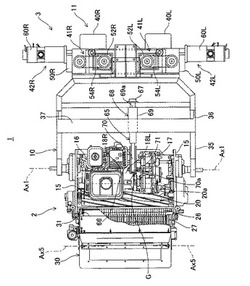
【解決手段】芝刈り作業車1は、車幅方向に延びる軸線Ax1を回転中心として回転駆動されるドラム式車輪18L、18Rを有する芝刈りユニット2と、芝刈りユニット2に連結されたフレーム10と、フレーム10に設けられた操舵駆動装置11と、を備え、操舵駆動装置11は、車幅方向に配置された一対の操舵輪40L、40Rと、一対の操舵輪40L、40Rの各操舵輪を独立して転舵可能な操舵部41L、41Rと、一対の操舵輪40L、40Rを回転駆動できる車輪駆動部42L、42Rと、を備える。
(もっと読む)
茶園管理機

【目的】 本発明は、茶畝を跨いで走行し、該走行方向を自動操舵することができ、特に、感知機構を固定状として、後進も良好にできるとともに、簡易な構成にできること。
【構成】 茶畝90を跨いだ前側門型フレーム2A及び後側門型フレーム2Bの左右下端に走行装置1,1を備え、茶畝に沿って作業を行う茶園管理機におけること。前側門型フレーム2Aの対向する内側に、平面的に見て左右茶畝側面91,91に接触しつつ中央箇所が茶畝90側に膨出する弧状感知板5と、この内部に設けられた圧力センサとを有する前進用茶樹感知手段Aが備えられていること。左右の弧状感知板5,5に加わる茶畝側面91,91からの接触圧力を測定して、左右それぞれの接触圧力が均等となるよう自動走行制御部Cにて制御して茶畝90に沿って前進自動走行するようにしてなること。
(もっと読む)
移動作業機の操縦制御装置
【課題】乗用型移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】移動作業機に設置した1つの可動式方向測定装置と、2つの可動式距離測定装置により作業領域の周囲に設置した複数の案内支柱を検出して移動作業機の進路の基準とし、移動作業機の進行に伴って目標とする案内支柱を切り換えながら途切れることなく検出し、移動作業機に内蔵する演算制御装置が正しい進路を進行するよう移動作業機を制御することで、移動作業機の案内支柱の列に沿った前進、転回を自動操縦で行うことを可能とし、前記課題を克服する。
(もっと読む)
1 - 3 / 3
[ Back to top ]