
Fターム[2B043EA19]の内容
農業機械一般(操向) (6,001) | 操向制御のための検出 (655) | 作業の状況 (5) | 条刈り又は横刈り作業 (3)
Fターム[2B043EA19]に分類される特許
1 - 3 / 3
コンバイン
【課題】センサにより旋回機構の異常を検出しても、作業者が旋回機構の異常を認識しないで作業することがある。
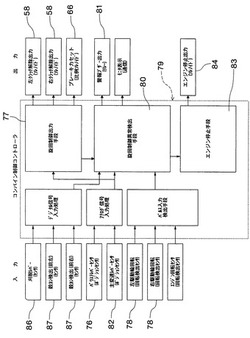
【解決手段】コンバインは、左右の車軸51の回転に回転差を発生させて旋回する無段階に変速可能な走行装置3と、走行装置3の操向レバー75の操作位置を検出する操向レバー位置検出手段76と、前記左右の車軸51の夫々の回転数を検出する回転検出手段78とを有する。制御コントローラ79の旋回制御異常検出手段80は、検出した左右の車軸51の回転差と、前記操向レバー75の傾倒操作角度とを対比して、旋回制御異常検出手段80で旋回制御の異常を検出し、該旋回制御異常検出手段80が異常と判定すると、異常を報知手段81により報知する。
(もっと読む)
刈取収穫機

【課題】 機体を自動操向操作により走行させながら植立茎稈の刈取作業を行うことが可能でありながら、植立茎稈の刈残し等が発生しない良好な状態で且つ能率よく刈取作業を行うことが可能となる刈取収穫機を提供する。
【解決手段】 対地位置検出手段にて求められる機体の対地位置情報に基づいて機体が作業対象領域内の設定経路に沿って走行するように、機体の向きを変更操作自在な操向操作手段29を制御する制御手段Hが備えられ、その制御手段Hが、設定経路における植立茎稈を刈り取る刈取用経路部分を走行するときに、対茎稈位置検出手段83にて検出される植立茎稈に対する機体の横幅方向の位置が刈取用の適正位置から外れると、対地位置検出手段の検出情報にかかわらず、対茎稈位置検出手段83の検出情報に基づいて機体の横幅方向の位置が適正位置になるように操向操作手段29を制御する。
(もっと読む)
走行クローラの旋回機構
【課題】走行路面条件または作業者の希望走行フィーリングに適応した操向または変速制御を得、運転操作性の向上などを図る。
【解決手段】左右走行クローラを同一方向に同一速度で駆動する変速部材と、左右走行クローラの旋回用操向部材とを有し、操向角度センサ及び変速センサの検出結果に基づき決定される左右走行クローラ速度変化の制御基準値を予め記憶させ、前記制御基準値を旋回感度設定器によって補正するように構成したことを特徴とする走行クローラの旋回機構である。
(もっと読む)
1 - 3 / 3
[ Back to top ]