
Fターム[2B072CB06]の内容
収穫機本体(地下収穫) (3,256) | 篩い分け、搬送手段に係る付属装置 (364) | 掘取り部から搬送部への引継ぎのための手段 (33)
Fターム[2B072CB06]に分類される特許
21 - 33 / 33
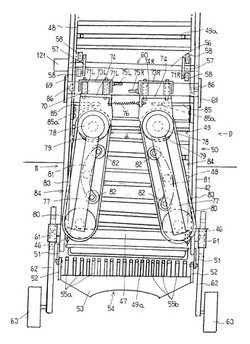
作物分離収穫機
【課題】
機体のバランスがよく、作物の掘取作業や分離作業を能率よく行うことのできる掘取収穫機を提供する。
【解決手段】
圃場を走行する走行装置Bと、圃場から作物Tを掘り取り機体後方へと搬送する掘取搬送装置Dと、掘取搬送装置Dで搬送中の作物Tを分離する第1分離装置Eと、第1分離装置Eで分離されなかった作物Tを分離する第2分離装置Gと、掘取搬送装置Dから分離された作物T引き継ぎ機体後方へと選別搬送する選別搬送装置Fとを設けた作物分離収穫機において、機体後側で且つ機体左右一側に走行装置Bと第2分離装置Gと掘取搬送装置Dの昇降部材68とに駆動力を供給する第1駆動装置2を設けると共に、機体前側で且つ機体左右他側に掘取搬送装置Dと第1分離装置Eと選別搬送装置Fとに駆動力を供給する第2駆動装置9を設けて構成する。
(もっと読む)
作物収穫機

【課題】マルチフイルムを被覆した圃場における収穫の際に、引起装置の稼動により、マルチフィルムの絡み付きを招くことなく倒伏状態の茎葉を掬い上げて生育株を引き抜き収穫することを可能とする作物収穫機を提供する。
【解決手段】作物収穫機は、圃場走行可能に支持された機体(3)と、その前部で生育株(P)の側方の倒伏状態の茎葉を掬い上げて引き起こす引起装置(4)と、同生育株(P)の主茎部を挟持して傾斜搬送する対向ベルトによる引抜搬送装置(5)とを備えて構成され、上記引起装置(4)は、植生表土面に沿って弾性変形可能に周回動作して倒伏茎葉を掬い上げる弾性ラグ群(11a)による掬上部材(11)と、この掬上部材(11)の作用点(A)より上方位置(H)でその茎葉を引き継ぎ周回動作をして引き上げる引掛ラグ群(12a)による引上部材(12)とから構成したものである。
(もっと読む)
搬送用ベルト及びその製造方法
【課題】ベルト本体にクッション体を精度良く貼り合わせて、搬送物の狭持力が低下することを抑制する。
【解決手段】エンドレスに延びてベルト内側の表面がプーリに接するベルト本体3と、ベルト本体3におけるベルト外側の表面に貼り合わせられたクッション体5とを備え、複数のプーリからなる2組のプーリ群にそれぞれ巻き掛けられることにより、互いに対向するクッション体5によって搬送物を狭持して搬送するように構成された搬送用ベルト1,2において、ベルト本体3及びクッション体5の一方に、他方側に突出する突出部21を形成すると共に、他方に突出部21に嵌合する凹部22を形成するようにした。
(もっと読む)
里芋収穫機
【課題】従来の分離装置は、里芋を掘り取って搬送するコンベヤ上面に対向して逆転する補助コンベヤを設けて親里から子芋を分離する構成であり、搬送するコンベヤに大きな搬送負荷が掛かり里芋が分離装置部で詰まったり、搬送コンベヤに大きな負荷が掛かり掘り取った里芋を搬送できないような事態が発生する恐れがあり、更に、分離装置で収穫した全ての親里から子芋を分離できずに親芋に子芋が付いたまま収穫作業を終え、収穫作業後に収穫した里芋から親芋に子芋が付いたものを探して、再度、分離装置で分離しなければならないようなことがあり、作業効率の点において課題があった。
【解決手段】掘取部38により掘り取った里芋を選別部Dまで搬送する搬送装置34と親芋から子芋を分離する分離装置45を設けた里芋収穫機において、該搬送装置34の上側に分離装置45を設け、選別部Dの近くに補助分離装置Eを設けた里芋収穫機。
(もっと読む)
作物収穫機
【課題】作物の茎葉を挟み込んで圃場から引く抜くことが比較的容易な一対の無端帯を備えた作物収穫機を提供すること。
【解決手段】圃場で生育した作物の茎葉を一対のプーリ28b、28c間に張られた上下方向に幅広の一対の搬送ベルト28a,28aで挟持して引き抜き、後方に搬送する挟持搬送装置を備えており、一対の搬送ベルト28a,28aは内部に空洞を設けた無端帯からなり、該無端帯の上方に向かって傾斜を設けた作物収穫機である。
内部が空洞の無端帯の挟持作用側を回転体接触面(支持面)側より上方に傾斜させたことによって、無端帯に下向きの力がかかると、無端帯の引抜作用面が作物に押し当てられるように無端帯が引っ張られるため、無端帯の引抜力が強くなるので、作物が引き抜きやすくなり、作業能率が向上する。
(もっと読む)
馬鈴薯用圃場の不要物排除装置
【課題】 圃場の深い層及び浅い層に存在する不要物である野良芋や塊茎にかかわらず、これを掘上げて回収すると共に、深い層に存在する野良芋や塊茎と同時に掘り上げられる不要物である土塊も回収する。
【解決手段】 掘り取られた不要物を含む土砂の運搬中に、不要物と不要物でない土砂を分離するとともに、不要物でない土砂を圃場C上に戻し、不要物のみを収容部4へ収容する。
(もっと読む)
農作物収穫機
【課題】従来の引上げ搬送装置のベルトは、定位置で回転するローラで案内され、茎葉の挟持力を弾性的に調節できず、一度に多量の茎葉が供給されると、詰まったり、装置側が破損する等の課題があった。
【解決手段】引上げ搬送装置2を構成する左右一方の搬送体2Rを、左右他方の機体左右方向に移動自在な搬送体2Lに隣接させた状態と搬送体2Lから離間させた状態とに切換自在に設けると共に、左右他側の機体左右方向に移動自在な搬送体2Lを機体外側から押圧する押圧力調節自在な弾性部材26を設ける構成とした農作物収穫機である。
(もっと読む)
作物収穫機
【課題】 コンテナ収容台上に設ける搬送用ローラの部品点数の削減とコンテナ収容台重量の軽減を図ることのできる作物収穫機を提供する。
【解決手段】 走行機体の横一側部に収穫部10を有し、他側部にコンテナ収容台6を設け、コンテナ収容台6の長手方向に沿って、コンテナCを搭載した状態で搬送可能なローラ搬送部64を設け、このローラ搬送部64では、左右に位置する搬送用ローラ65の搬送方向における前後方向位置が齟齬するように搬送用ローラ65を千鳥状に配備してある。
(もっと読む)
作物収穫機
【課題】 コンテナ収容台上におけるコンテナの送り出しを自動化して作業の効率化を図るとともに、コンテナ収容台上におけるコンテナの送り出しのタイミングを人為的にも選択可能にして、各種作業形態への適応性の良い作物収穫機を提供する。
【解決手段】 作物収穫機のコンテナ収容台6の上手側収容台部分61に、コンテナ移載装置5の送り出し終端に対向する部位のコンテナCを、下手側収容台部分62側へ向けて強制移送する駆動手段60を装備し、かつ、この駆動手段60を、上手側収容台部分61にコンテナCが送り込まれたことを感知して自動的に作動させる自動駆動状態と、人為的な指令操作に基づいて駆動する状態とに切換操作可能に構成してある。
(もっと読む)
作物収穫機
【課題】 コンテナ収容台上におけるコンテナの位置および姿勢を安定させて、コンテナ収容台上におけるコンテナの送り移動を所期通りに行わせ易い作物収穫機を提供する。
【解決手段】 走行機体の横一側部に収穫部10を有し、他側部に、機体前後方向に沿って長く形成されたコンテナ収容台6を設け、収穫部10の後部側に、その収穫部から送り込まれた作物をコンテナCに収容してコンテナ収容台6側へ向けてコンテナCを移送するコンテナ移載装置5を備えてなる作物収穫機において、コンテナ移載装置5とコンテナ収容台6との間に、コンテナ移載装置5側からコンテナ収容台6側へのコンテナCの移動は許容し、逆方向へのコンテナCの移動は抑止する戻り規制部材70を設けてある。
(もっと読む)
作物収穫機
【課題】玉葱等の作物を4条ずつ効率よく収穫できるようにする。
【解決手段】2条の作物の茎葉をまとめて引き起こす茎葉引き起こし機構と、この茎葉引き起こし機構で引き起こされた2条の作物の茎葉を上下2箇所で挟持しながら畝から作物を引き抜いて搬送する上下引き抜き機構と、この上下引き抜き機構で搬送する途中で茎葉と鱗茎とを分離する切断機構とを有し、前記茎葉引き起こし機構と引き抜き機構と切断機構とが、走行機体上に左右一対搭載され、前記走行機体の後部に、左右の下引き抜き機構で搬送されてくる鱗茎を受け取る収穫機構が設けられている。
(もっと読む)
根菜類収穫機の補助コンベヤおよびこれを備えた根菜類収穫機
【課題】 大きな根菜類が掘り取られても堀取コンベアと補助コンベアとの間に容易に取り込むことができ、大きさが相当に異なる根菜類が同時に搬送されてもこぼれ落とさないように狭持して搬送することができる根菜類収穫機の補助コンベヤおよびこれを備えた根菜類収穫機を提供する。
【解決手段】 堀取側のプーリー23の近傍位置において補助コンベアベルト24を内側から堀取コンベア6側に押し出して取込用傾斜面15aを形成するとともに、この取込用傾斜面15aに沿って取り込まれる根菜類に押されて引っ込むことにより根菜類の大きさに応じた適正な狭持間隔を保持する取込用狭持補助手段15を有している。
(もっと読む)
根菜類収穫機の根菜類列検知装置
【課題】 センサの調整条件を極力減らせる簡易な構造にすることで茎葉等の夾雑物の絡まりを防止するとともに、畝からの接地負荷に対する追従性を高めることにより、根菜類列の検知精度を高めることができる根菜類収穫機の根菜類列検知装置を提供する。
【解決手段】 接触アーム3は、畝から受ける上方向の押圧力を吸収し得る弾性力を備えているとともに、所定の下向傾斜角で左右の内側方向に延設された接触先端部32と、この接触先端部32から左右の外側方向に湾出された湾曲部31とを有しており、接触先端部32が根菜類の頭側部に当接した場合、その当接力により湾曲部31を左右の外側方向に回動させてその回動変位を変位センサ5Aに伝達し、接触先端部32が畝に接触して下方から押圧された場合、その押圧力を湾曲部31の弾性力によって吸収して変位センサ5Aに伝達しないように構成されている。
(もっと読む)
21 - 33 / 33
[ Back to top ]