
Fターム[2B304MA14]の内容
Fターム[2B304MA14]の下位に属するFターム
牽引力制御(ドラフト制御) (14)
Fターム[2B304MA14]に分類される特許
1 - 14 / 14
移動式電動作業機
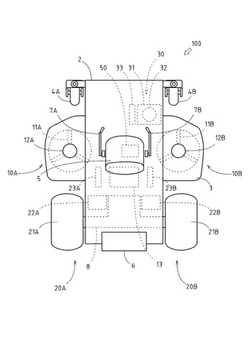
【課題】作業部の過負荷運転を回避することができる移動式電動作業機を提供する。
【解決手段】走行部20によって移動しながら、ブレードインバータ14A・14Bから供給される電力により駆動される作業部10A・10Bによって作業を行い、デッキ高さ調整部30によってデッキ3のデッキ高さ位置Hを調整する電動式芝刈作業機100であって、ブレードインバータ14A・14Bからのブレードインバータ電流値Iba・Ibbに基づいて、作業部10A・10Bの作業負荷が一定となるように、デッキ3のデッキ高さ位置Hの調整を制御する。
(もっと読む)
乗用作業車

【課題】車体の走行に伴って車体周囲の作業対象物に対する作業を行う電動式作業デバイスの作業負荷の変動による不都合を低減する乗用作業車を提案する。
【解決手段】駆動車輪ユニットを走行駆動するための走行用電動機ユニットと、目標走行速度を設定するために運転者によって操作される速度設定操作ユニットと、車体の走行に伴って車体周囲の作業対象物に対する作業を行う作業デバイスを駆動するための作業用電動機と、作業用電動機の負荷を評価する作業負荷評価部によって評価された作業用電動機の負荷がしきい値より高い異常負荷である場合に目標走行速度より低い例外速度で走行用電動機ユニットを制御する例外速度制御を実行する例外速度制御部とを備えている。
(もっと読む)
トラクタの作業機掘り深さ自動制御装置
【課題】本発明では、地面を掘りながら進行する作業機を牽引したトラクタの作業機掘り深さ自動制御装置において、掘り深さを自動的に設定深さに維持するに、設定掘り深さを浅くしても外乱要素によって作業機が頻繁に昇降しないように制御することを課題とする。
【解決手段】トラクタ1で牽引する作業機2の対地掘り深さHを適宜の設定対地掘り深さH0に設定し、実際の対地掘り深さHが設定対地掘り深さH0の許容振れ幅Kからずれても一定の猶予時間Tだけそのずれを放置するよう制御し、設定対地掘り深さH0が浅い場合には深い場合よりも猶予時間Tを長くして、猶予時間Tの経過後に作業機2の位置を設定対地掘り深さH0に修正するように制御したことを特徴とするトラクタの作業機掘り深さ自動制御装置とした。
(もっと読む)
作業車両
【課題】
土壌状態に合わせてエンジンの燃料噴射量を変更し、安定した土壌ではエンジンの回転数を減少させて燃費を向上させると共に、不安定な圃場ではエンジンの回転数を増大させて走行姿勢を安定させることのできる作業車両を提供する。
【解決手段】
左右の前輪6,6と左右の後輪7,7により圃場を走行する走行車体9にエンジン8を設け、走行車体9の後部に圃場に苗を植え付ける植付部5を設けた作業車両において、走行する土壌の状態を検出する土壌センサ10を設け、土壌センサ10が検出した土壌状態に合わせてエンジン8の燃料の噴射量を増減制御する構成とし、土壌センサ10の下部に、土壌センサ10の検出面11に間欠的に接触して付着物を除去する清掃部材12を設ける。
(もっと読む)
トラクタの作業機昇降制御装置
【課題】負荷率に応じて目標耕深を補正するにあたり、耕耘深さの急激な変化を回避すると共に、負荷率の回復を早めて耕深制御への復帰を促す。
【解決手段】耕深自動制御中に、エンジンENGの負荷率Lが所定値Iを超えたとき、目標耕深を補正してエンジンストールを防止する目標耕深補正手段を備えるトラクタの制御部20において、エンジンENGの負荷率Lが所定値Iを超えたとき、目標とする負荷率Hと現在の負荷率Lとの偏差に比例する比例制御量Tを算出すると共に、該比例制御量Tと前回の補正値Eとの差分Dを積分して目標耕深の補正値Eを決定するにあたり、負荷率Lの減少が見られないときは、それまでの積分値Kに差分Dを加算して補正値Eを決定し、負荷率Lの減少が見られるときは、それまでの積分値Kから差分Dを減算して補正値Eを決定する。
(もっと読む)
苗移植機
【課題】本発明では、作業時の燃料消費を抑えた、低燃費の苗移植機を提供することを課題とする。
【解決手段】
走行車体2にエンジン20と油圧無段変速装置23を設け、走行車体2の後部に圃場に苗を植え付ける苗植付装置52を設け、油圧無段変速装置23の出力を切り替えて機体の前後進及び走行速度を操作する変速操作レバー8を設けた苗移植機において、油圧無段変速装置23に駆動容量を変更可能な可変アクチュエータ29を設け、走行車体2の走行状態を検知する第1走行検知部材14と第2走行検知部材9を設け、第1走行検知部材14の検知する走行状態に合わせて可変アクチュエータ29の駆動容量とエンジン20の回転数を制御する制御装置6を設けて構成する。
(もっと読む)
作業車両
【課題】耕耘作業を行う作業車両の発進時に、耕耘負荷や走行負荷が大きい場合であっても、エンジン回転数の低下を抑制することができ、エンジンの停止を回避することができる作業車両を提供する。
【解決手段】走行速度を変速する無段変速機を備え、ロータリ耕耘装置を昇降可能に装着する作業車両となるトラクタであって、前記トラクタが停止し、前記ロータリ耕耘装置が接地し、かつ、前記ロータリ耕耘装置が駆動して、その後、前記トラクタが発進する場合は、その発進から規定距離X又は規定時間Tが経過するまでは、前記無段変速機の目標変速比を所定の補正率で減速側に補正するものである。
(もっと読む)
作業車
【課題】複数の制御モードの選択切り換えと、その切り換えた制御モードでの設定変更の可否と、設定変更した値を記憶するか否かの選択とを単一の選択操作具で行わせるようにして、構造の簡素化と操作性の向上とを図る。
【解決手段】制御装置100は、一つの制御モードが選択された状態において、選択操作具67が選択操作のために設定された時間よりも長い時間にわたって操作されると、制御手段101〜105の制御状態を設定操作具45により変更設定可能な変更設定モードを設定し、変更設定モードの設定後に選択操作具67が再度長い時間にわたって操作されると、制御手段101〜105の変更された状態を記憶手段106に記憶させるように構成した。
(もっと読む)
作業車両
【課題】作業車両に連結された対地作業機の牽引負荷が大きくなった場合の安全対策が取り得る牽引負荷制御機能を備えた作業車両を提供することである。
【解決手段】トラクタ車両Tが作業機84の牽引荷重が大きくなって行く過程で、牽引荷重が所定の第一しきい荷重値を越えて作業機84を上昇させる昇降シリンダ70の上昇出力を行っているにもかかわらず前記牽引荷重が大きくなると、走行車両Tに機械的な損壊が発生してしまう可能性がある。そこで作業機84の上昇出力が大きくなっていても所定の第一しきい荷重値を越えて牽引荷重が大きくなっていく場合は、変速装置Kの変速位置を例えば1段減速する。この減速が不可能な変速位置の場合はエンジン回転数を低下させる。
(もっと読む)
耕耘機
【課題】本発明は、耕耘作業において、機体が前方に押し出される現象を解消することができる耕耘機を提供することを課題とする。
【解決手段】耕耘機10は、機体11にエンジン12を備え、このエンジン12から耕耘爪14に駆動力を断接するクラッチ22を備え、機体11の後方中央部に耕耘時に土壌に差し込まれ必要とする耕耘深さを設定する抵抗棒21を備え、クラッチ22が接続されているとのクラッチスイッチ23の情報を受け、抵抗棒21へ土壌から受ける力が第1の力以上であるとの負荷検出スイッチ41の情報を受け、且つ、抵抗棒21へ土壌から受ける力が第2の力以下の力であるとのダッシング検出センサ61の情報を受けたときにエンジン12の回転速度を高速になるように制御する制御部57を備えている。
(もっと読む)
トラクタ
【課題】耕深を維持するための適正な車速、又は車速を維持するための適正な耕深を容易に認識可能とする。
【解決手段】コモンレールを備えたエンジンと該エンジンの制御を行うECU、及び作業機を搭載したトラクタにおいて、該作業機により耕す深さを設定する耕深設定手段、該耕深設定手段の機能を入り状態とする自動耕深スイッチ、該自動耕深スイッチが入り状態のときに耕深優先又は車速優先を選択する選択スイッチを設け、前記自動耕深スイッチが入り状態のときに前記選択スイッチにより耕深優先又は車速優先のいずれか一方が選択された状態で作業機を駆動して作業走行が開始されると、前記ECUは負荷率を検出して本機側の制御装置に送信し、該制御装置は耕深を維持するための車速、又は車速を維持するための耕深を算出してモニターに表示することを特徴とするトラクタの構成とする。
(もっと読む)
農作業車両
【課題】本発明は、畦を乗り越える圃場出入時に作業機の上昇等の複雑な操作を自動化してオペレータが操縦操作に専念出来るようにすることで、安全な圃場の出入が行えるようにすること課題とする。
【解決手段】農作業車両の操縦席6の近傍に、圃場内への侵入時に操作する圃場出入スイッチ59を設け、走行速度の設定と、PTO軸停止と、作業機の上昇、及びエンジン回転数上昇をあらかじめ設定可能な構成とし、前記圃場出入スイッチ59を入り状態にすることで、前記設定している走行速度の低速化と、PTO軸停止と、作業機の上昇、及びエンジン回転上昇を自動に制御する構成を備えたことを特徴とする農作業車の構成とする。また、圃場出入スイッチ59を変速レバー18或いはステアリングハンドル8に設けたことを特徴とする農作業車両の構成とする。
(もっと読む)
作業車両の作業機昇降装置
【課題】手動操作用の切換バルブにより作業機の昇降速度を選択することができる作業車両の作業機昇降装置を提供する。
【解決手段】走行機体3に設けたトップリンク12と、ロワーリンク13,13とからなる3点リンク機構に作業機を連結して、リフトアーム16,16の上下回動によって作業機を昇降させる作業車両であって、前記リフトアーム16,16を駆動する左右のリフトアームシリンダ17L,17Rを備えると共に、当該リフトアームシリンダ17L,17Rを作動させる油圧回路中に、両リフトアームシリンダ17L,17Rを伸縮作動させる両シリンダ作動位置Aと、片側のリフトアームシリンダ17Lのみを伸縮作動させる片側シリンダ作動位置Bに切り換える手動切換バルブ37を設けた構成にする。
(もっと読む)
トロイダル無段変速式トラクター
【課題】走行車速を制御して作業走行を行うための制御部を有するトロイダル無段変速式トラクターにおいて、対地作業機の作業開始による負荷変動の影響を抑えて安定した作業走行を可能とするトラクターを提供することにある。
【解決手段】トロイダル無段変速式トラクターは、トラクターTの車速調節用トロイダル機構5aのバリエータ比を制御して作業走行を行うための制御部Cを備え、上記制御部Cは、上記対地作業機Rの作業開始に関連して上記バリエータ比の変更制御をするように構成する。
(もっと読む)
1 - 14 / 14
[ Back to top ]