
Fターム[2B304PC01]の内容
Fターム[2B304PC01]に分類される特許
1 - 5 / 5
農作業機の操作給電システム
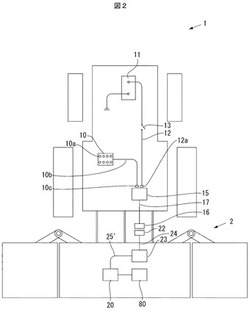
【課題】トラクタに装着して農作業を行う作業機をトラクタから脱着する際に、操作及び給電のためのハーネスの取り付け、取り外しが不要となる農作業機の操作給電システムを提供することを目的とする。
【解決手段】トラクタ1に装着して農作業を行いトラクタ1と脱着可能な作業機2と、トラクタ1側に設置される送信部16と、作業機2に設置される受信部22とを有し、操作部10からの操作情報を、送信部16と受信部22の間で無線送信して作業機2側に送信し、トラクタ1に有する電源11からの電力を、送信部16と受信部22の間でワイヤレスで電力伝送して作業機2側へ送る。
(もっと読む)
農作業機のリモコンシステム

【課題】トラクタに装着して農作業を行う作業機のための設定等が携帯電話を利用することで、より簡単に行える農作業機のリモコンシステムを提供することを目的とする。
【解決手段】トラクタに装着して農作業を行う作業機3と、携帯電話2とを備え、携帯電話2は、携帯電話2のボタンを利用して作業機3のための設定を行う設定機能と、設定機能による設定情報を送信する送信機能とを有し、作業機3は、作業機3に設けられた出力機器と、携帯電話2から設定情報を受信する受信部と、出力機器の操作を行う操作表示部70と、受信部が受信した設定情報と操作表示部70からの操作信号に基づき出力機器を制御する制御部5とを有する。
(もっと読む)
作業車の作業装置昇降操作装置
【課題】 作業装置昇降用のポジション制御弁がポジションレバー30や電動モータ31によって操作される作業車において、電動モータ31によるポジション制御弁の操作によって作業装置が上昇された後、ポジションレバー30をわずかに上昇側に操作すれば、電動モータ31による作業装置上昇保持を解除できるようにする。
【解決手段】 ポジションレバー30の上昇側の操作限界を設定するストッパー61を、作用位置変更自在に設けてある。電動モータ31を操作する昇降制御手段は、ストッパー61の作用位置を検出するセンサ64、及びポジションレバー30の操作位置を検出するセンサ67の検出情報を基にストッパー61がストップ作用したことを検出し、この検出結果を基に、電動モータ31を下降操作側に操作する。
(もっと読む)
乗用型作業機
【課題】従来、前輪の直進状態から所定角以上の操向によって左右後輪の旋回内側のもののサイドクラッチを切って制動する旋回連繋機構を設けた乗用型田植機があるが、操縦者は旋回に適した車速となるように、アクセル操作若しくは変速操作しなければならず、旋回時の操向操作に専念できず、旋回操作性の点において課題があった。
【解決手段】操向用の左右前輪6・6と左右後輪7・7・を有する乗用型走行車両において、左右後輪7・7への駆動を各別に入り切りする左右サイドクラッチI・I若しくは左右後輪7・7を各別に制動する左右サイドブレーキJ・Jを設けて、左右前輪6・6の所定角度以上の操向操作に連動して、左右前輪6・6の操向方向側の後輪7のサイドクラッチIを切るかサイドブレーキJをかける連携手段を設けると共に、機体旋回位置を判断する手段を設けて機体旋回時に車速を減速する手段を設けた乗用型走行車両。
(もっと読む)
移植機における昇降制御装置
【課題】 移植機の昇降制御装置においてエンジンコントロールレバーと感度調節レバーとフロート側とのシンプルな連結構造を提供することを課題としている。
【解決手段】 エンジン6の回転数を調節するエンジンコントロールレバー74により操作されるコントロールワイヤ73と、移植作業機10に上下動自在に支持された接地フロート14の姿勢を揺動自在に設定するフロートワイヤ71とを連結具25を介して直結し、該連結具25が、接地フロート14の圃場の土圧に応じた上下動に基づく移植作業機10の昇降制御の感度を調節する感度調節レバー50の所定のポジションに対して所定の範囲でフロートワイヤ71の操作を許容し、且つ感度調節レバー50の揺動操作により両ワイヤ71,73の操作方向にスライドせしめられる。
(もっと読む)
1 - 5 / 5
[ Back to top ]