
Fターム[2B304QA09]の内容
Fターム[2B304QA09]に分類される特許
1 - 8 / 8
水平制御装置
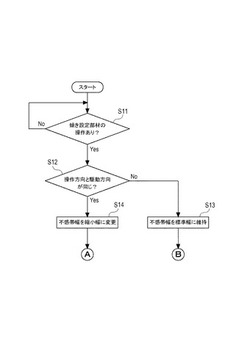
【課題】オペレータが移動させたい方向とは反対方向に制御対象部材の傾きが変更されるという不都合を確実に防止する。
【解決手段】水平制御装置において、制御装置は、傾き設定部材が操作されると、当該傾き設定部材の操作方向を把握すると共に、傾きセンサによって検出された前記傾き設定部材の操作前の状態における制御対象部材の実際の傾きと前記傾き設定部材の操作後の状態に応じて設定される目標傾きを基準とした縮小幅の不感帯との相対位置関係に基づいてアクチュエータによって前記制御対象部材が傾けられるべき傾斜方向を把握して、前記操作方向及び前記傾斜方向が同じか否かを判定し、前記操作方向及び前記傾斜方向が同じ場合には前記傾き設定部材の操作時に行う不感帯幅の縮小幅への変更を許容し、前記操作方向及び前記傾斜方向が異なる場合には前記傾き設定部材の操作時に行うべき不感帯幅の縮小幅への変更を禁止して不感帯幅を標準幅に維持する。
(もっと読む)
田植機

【課題】 本発明の課題は、植付部を適正に稼動することができる田植機を提供することにある。
【解決手段】 転向車輪と後輪とを備えて旋回走行可能な水田作業車の旋回動作信号と、同水田作業車に昇降可能に搭載されて均平用のフロートを備えた植付部の高さ位置信号とを受け、機体の旋回動作と対応して植付部の昇降調節と稼動を制御する制御処理部を備える田植機において、後輪を駆動する後輪伝動部(16)には、後輪車軸(3a)へ減速伝動する減速伝動部と、該減速伝動部よりも伝動上手側に設けた走行距離を算出するための回転センサ(16s)とを備え、旋回のためのハンドル操作又は植付切操作で走行の距離カウントを開始し、走行の距離カウントが所定の旋回走行距離に到達したときに植付部を稼動制御する制御装置を設けた。
(もっと読む)
作業車の供給物補給構造
【課題】作業装置の供給物補給高さ位置への無理な下降操作で作業装置が損傷するなどの不都合の発生を阻止する。
【解決手段】走行車体の後部に供給物を圃場に供給する作業装置を昇降可能に装備し、作業装置への供給物の補給を要する状態を検知した場合に、作業装置を作業高さ位置から予め設定した供給物補給高さ位置まで自動昇降させる補給用昇降制御を実行する制御手段を備えた作業車の供給物補給構造において、作業装置の接地を検知し、かつ、作業装置の高さ位置が供給物補給高さ位置よりも高いことを検知した状態で、作業装置への供給物の補給を要する状態を検知した場合には、制御手段が補給用昇降制御を実行しないように構成してある。
(もっと読む)
作業機のロール角度検出構造
【課題】旋回走行中の変速により発生する加速度に起因して、ロール角度検出用のセンサの出力に基づいて演算した機体のロール角度が信頼性の低いものになるのを防止する。
【解決手段】機体のロール角度に応じて出力が変化するロール角度検出用のセンサ77と、このセンサ77の出力に基づいて機体のロール角度を演算するロール角度演算手段40Daを備え、ロール角度演算手段40Daが、旋回情報出力手段Aの出力に基づいて機体の旋回走行を検知している間は、センサ77に働く遠心力を演算する遠心力演算処理と、この遠心力演算処理で得た値に基づいてセンサ77の出力を補正する補正処理を行い、この補正処理後のセンサ77の出力に基づいて機体のロール角度を演算し、旋回情報出力手段Aと変速情報出力手段Bの出力に基づいて旋回走行中の変速を検知している間は、センサ77の出力を取り込まない取込中断処理を行うように構成してある。
(もっと読む)
作業車のリフトアーム昇降構造
【課題】作業車のリフトアーム昇降構造において、エンジンの始動操作を行った後に、作業者の誤解を招かないように構成する。
【解決手段】昇降操作具23の操作に伴って昇降操作具23の操作位置に対応する位置とリフトアーム7の位置との差により、制御弁11が上昇及び下降位置に操作され、昇降操作具23の操作位置に対応する位置とリフトアーム7の位置とが合致すると、制御弁11が中立位置に操作される。昇降操作具23の操作位置に対応する位置を検出する第1位置センサー38と、リフトアーム7の位置を検出する第2位置センサー44とを備える。キースイッチ43のOFF位置からON位置への操作時において、第1及び第2位置センサー38,44の検出値が合致しないと、昇降操作具23の操作位置に対応する位置を変更して、第1及び第2位置センサー38,44の検出値を合致させる。
(もっと読む)
農作業機
【課題】 昇降操作具の操作位置に拘わらず後進上昇手段の入切り操作を任意に行うことができ、使い易い切換操作具を備えた農作業機を提供する。
【解決手段】 苗植付装置2に対する油圧シリンダ4、油圧シリンダ4を操作するもので人為的に操作される昇降操作具55、及び、油圧式無段変速装置21、油圧式無段変速装置21を操作するもので人為的に操作される変速操作具33を備える。変速操作具33が後進中立位置に操作されると苗植付装置2を上昇作動させる後進上昇手段を設け、後進上昇手段を作動させる状態と作動させない状態とに切り換える人為的切換操作具Aを、昇降操作具55とは別個に備えている。
(もっと読む)
作業機の水平制御装置
【課題】確実、かつ円滑に作業機の水平制御を行うことができる作業車両を提供する。
【解決手段】作業機センサ26を充電するための充電器24を機体1の本体に備えるとともに、作業機センサ26を作業機16と充電器24のホルダとの間で着脱自在に設け、作業機センサ26がID取得部(ID取得手段)26aを備え、作業機センサ26が充電器24のホルダ内に有するときにコントローラ25からIDを取得し、作業機センサ26とコントローラ25とがIDによる無線通信で、作業機16を水平制御する。
(もっと読む)
農作業機のローリング制御装置
【課題】 検出された機体傾斜角度に基づいて、対地作業装置の左右方向での対地傾斜姿勢が設定傾斜角度に維持されるように、対地作業装置を駆動ローリングさせるローリング制御装置において、通常は検出された機体傾斜角度と設定傾斜角度との偏差に基づいてローリング制御し、畦際等の圃場面の起伏が急でローリングアクチュエータの最大速度で対地作業装置をローリング駆動しても追随が不可能な場合は、ローリングアクチュエータの制御の仕方を替えて作業装置のローリング姿勢の安定化を図る。
【解決手段】 対地作業装置を駆動ローリングさせるローリング制御装置において、現在の走行機体の傾斜変化の状態が、ローリングアクチュエータの最大速度で対地作業装置をローリング駆動しても追随が不可能な状態にある場合は、設定傾斜角度と検出傾斜角度との偏差によらず、機体の傾斜変化の方向とは反対方向に機体が傾動するように制御を行うことを特徴とする。
(もっと読む)
1 - 8 / 8
[ Back to top ]