
Fターム[2B304QB21]の内容
Fターム[2B304QB21]の下位に属するFターム
Fターム[2B304QB21]に分類される特許
1 - 11 / 11
移動式電動作業機
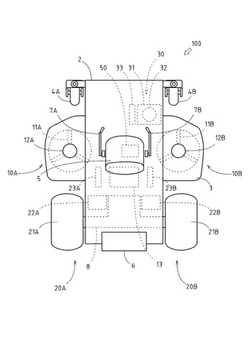
【課題】作業部の過負荷運転を回避することができる移動式電動作業機を提供する。
【解決手段】走行部20によって移動しながら、ブレードインバータ14A・14Bから供給される電力により駆動される作業部10A・10Bによって作業を行い、デッキ高さ調整部30によってデッキ3のデッキ高さ位置Hを調整する電動式芝刈作業機100であって、ブレードインバータ14A・14Bからのブレードインバータ電流値Iba・Ibbに基づいて、作業部10A・10Bの作業負荷が一定となるように、デッキ3のデッキ高さ位置Hの調整を制御する。
(もっと読む)
田植機

【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、植付部と、土壌反力検出装置と、制御部と、を備える。植付部は、植付爪を駆動することにより苗の植付けを行う。土壌反力検出装置は、植付爪が苗の植え付けを行うごとに土壌から受ける土壌反力を検出する土壌反力検出部と、植付爪の回転位相を検出する回転位相検出部を備えている。前記制御部は、前記土壌反力及び回転位相に基づいて植深値を算出する(S102)。そして制御部は、検出された植深値に基づいて、植付部を昇降制御する(S109)。
(もっと読む)
乗用作業車
【課題】車体の走行に伴って車体周囲の作業対象物に対する作業を行う電動式作業デバイスの作業負荷の変動による不都合を低減する乗用作業車を提案する。
【解決手段】駆動車輪ユニットを走行駆動するための走行用電動機ユニットと、目標走行速度を設定するために運転者によって操作される速度設定操作ユニットと、車体の走行に伴って車体周囲の作業対象物に対する作業を行う作業デバイスを駆動するための作業用電動機と、作業用電動機の負荷を評価する作業負荷評価部によって評価された作業用電動機の負荷がしきい値より高い異常負荷である場合に目標走行速度より低い例外速度で走行用電動機ユニットを制御する例外速度制御を実行する例外速度制御部とを備えている。
(もっと読む)
トラクタ
【課題】エンジンのストールを防止するとともに、燃費の良い状態で作業を継続して行うことができるトラクタを提供する。
【解決手段】エンジンと、ロータリ耕耘装置と、昇降アクチュエータと、制御装置と、を備えるトラクタであって、制御装置は、エンジンのエンジン回転数Nrとエンジンの正味平均有効圧力Pmとの関係を示すマップにおいて予め設定される低燃費領域Zを記憶し、出力検出手段により検出されるエンジンの出力に基づいてエンジンの負荷率を算出し、エンジン回転数Nr及び正味平均有効圧力Pmが低燃費領域Zに含まれ、かつ負荷率が上昇用設定負荷率(設定負荷率)以上である状態が上昇用設定時間(設定時間)以上継続した場合、ロータリ耕耘装置を設定角度(設定上昇量)だけ上昇させる。
(もっと読む)
耕耘作業機の耕深制御構造
【課題】エンジン回転数をエンジンストール防止用の指標とせずに、エンジンの過負荷に起因したエンジンストールの発生を防止する。
【解決手段】エンジン6を搭載した走行車体1に対してロータリ耕耘装置3を昇降駆動する駆動手段41、ロータリ耕耘装置3の制御目標耕深を設定する設定手段56、ロータリ耕耘装置3の耕耘深さを検出する検出手段53、検出手段53の出力が設定手段56の出力に対応するように駆動手段41の作動を制御する制御手段25A、及び、エンジン6の燃料噴射量を演算する演算手段62を備え、制御手段25Aが、演算手段62の出力がエンジンストール防止用の閾値を上回った場合に、演算手段62の出力と閾値に基づいて制御目標耕深を浅い側に補正し、この補正後の制御目標耕深に検出手段53の出力が対応するように駆動手段41の作動を制御する。
(もっと読む)
トラクタ
【課題】耕深を維持するための適正な車速、又は車速を維持するための適正な耕深を容易に認識可能とする。
【解決手段】コモンレールを備えたエンジンと該エンジンの制御を行うECU、及び作業機を搭載したトラクタにおいて、該作業機により耕す深さを設定する耕深設定手段、該耕深設定手段の機能を入り状態とする自動耕深スイッチ、該自動耕深スイッチが入り状態のときに耕深優先又は車速優先を選択する選択スイッチを設け、前記自動耕深スイッチが入り状態のときに前記選択スイッチにより耕深優先又は車速優先のいずれか一方が選択された状態で作業機を駆動して作業走行が開始されると、前記ECUは負荷率を検出して本機側の制御装置に送信し、該制御装置は耕深を維持するための車速、又は車速を維持するための耕深を算出してモニターに表示することを特徴とするトラクタの構成とする。
(もっと読む)
農作業機のローリング制御装置
【課題】 走行機体に作業装置を電動モータにより駆動ローリング自在に連結し、傾斜検出手段によって作業装置における左右方向の傾斜角度を検出し、その検出傾斜角度に基づいて電動モータを通電作動させて、作業装置の左右傾斜角度を目標傾斜角度に近づけるよう構成した農作業機のローリング制御装置において、電動モータやそのドライバーの熱保護や過負荷保護を図るとともに、負荷が軽減した後のローリング制御を遅れなく速やかに行えるようにする
【解決手段】 検出傾斜角度θと目標傾斜角度θ0との偏差に基づいて電動モータ53の駆動電流を制御するよう構成するとともに、電動モータ53の駆動負荷を検知する負荷検知手段を備え、検知された駆動負荷が設定範囲内に維持されるように電動モータ53の駆動電流を制御する保護手段を備えてある。
(もっと読む)
トロイダル無段変速式トラクター
【課題】走行車速を制御して作業走行を行うための制御部を有するトロイダル無段変速式トラクターにおいて、対地作業機の作業開始による負荷変動の影響を抑えて安定した作業走行を可能とするトラクターを提供することにある。
【解決手段】トロイダル無段変速式トラクターは、トラクターTの車速調節用トロイダル機構5aのバリエータ比を制御して作業走行を行うための制御部Cを備え、上記制御部Cは、上記対地作業機Rの作業開始に関連して上記バリエータ比の変更制御をするように構成する。
(もっと読む)
作業車両のアーム型作業機
【課題】農用作業車両の複数箇所にロボットアームを装着可能に構成し、ロボットアームにより複数の作業を円滑に実行する。
【解決手段】縦軸(22c)回り及び横軸(22d)回りに回動自在な第一アーム(23)と、この第一アーム(23)の先端部に屈折自在に連結している第二アーム(24)とでロボットアームを構成する。ベース部材(22)に前記第一アーム(23)を前記縦軸(22c)回りに回動自在に支持し、トラクタ(1)の機体前側部と左右側部にベース部材(22)の取付部(21a,21b)を設け、第二アーム(24)の先端部に複数の補助作業装置(26,…)を取り付け可能に構成する。
(もっと読む)
農作業機械
【課題】 ロータリ耕耘機付きのトラクタにおいて、エンジンストールを招来することなく、ロータリ耕耘機の上昇動時に形成される耕耘跡穴及び盛土の大きさを小さくできるようにする。
【解決手段】 走行機体2には、エンジン回転数NEを検出するエンジン回転センサを備える。エンジン制御コントローラは、ロータリ耕耘機が耕耘位置から非耕耘位置に上昇動するとき、エンジントルクTEが所定値TE0より低くなるのを抑制しながらエンジン回転数NEを下限回転数NE0にまで低下させ、これに連動してPTO回転数NPを適宜低下させる。
(もっと読む)
作業車両の制御装置
【課題】従来正確な負荷変動が検知できなかったので、エンジンの回転数と燃料噴射量からトルクを演算して、該トルクの変化状態を作業時において検知し、そのトルク変化が所定の形状となるとスリップしたと判断し、このスリップが生じないように制御する。
【解決手段】電子制御式燃料噴射装置を具備し、サイクル毎の噴射量を演算する手段を備えたディーゼルエンジンを搭載した作業車両において、該エンジンのクランク軸25の回転を検知する手段33と、作業車両に装着した作業機7と、燃料噴射装置の噴射量制御手段と、作業機の昇降を制御する手段と、作業車両速度制御手段とを備え、燃料噴射量とエンジン回転数によりエンジントルクを演算し、予め任意に設定した所定時間内に急激なトルクの上昇の後に急激なトルクの低下があり、そのトルクが任意に設定した時間持続すると車輪がスリップしたと判断する。
(もっと読む)
1 - 11 / 11
[ Back to top ]