
Fターム[2C150DF23]の内容
Fターム[2C150DF23]の下位に属するFターム
機械的なもの (48)
電気的なもの (268)
空気的なもの (16)
爆発又は破裂によるもの (13)
Fターム[2C150DF23]に分類される特許
1 - 4 / 4
楽器演奏ロボットおよび楽器自動演奏方法
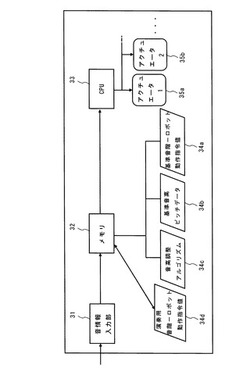
【課題】周囲温度の差異、楽器の器差の影響等により発生する音高のずれを自動修正する。
【解決手段】本発明の一態様に係る楽器演奏ロボットは、演奏動作を行い楽器の演奏を行う楽器演奏ロボットであって、演奏動作により演奏した楽器の演奏音を入力するための音情報入力部31と、音情報入力部31に入力された演奏音の音高と基準音高とを比較し、音高のずれを判別する判別部と、判別部で判別された音高のずれに基づいて、演奏動作を修正する修正部とを備える。
(もっと読む)
動き特徴提示装置、動き特徴提示方法及び動き特徴提示プログラム

【課題】本発明は、所望の動きデータを容易に検索させる。
【解決手段】本発明は、特徴提示情報生成部72により、動きデータに基づく音楽ロボット装置12の動きの特徴を表示によって提示するための特徴提示情報を生成し、制御部70により、記憶部73に特徴提示情報を記憶し、外部からの動きの特徴の提示要求に応じて記憶部73から特徴提示情報を読み出すことにより、特徴提示情報に基づき、動きデータに基づく音楽ロボット装置12の動きの特徴を表示して提示することで、当該動きデータに基づいて音楽ロボット装置12を実際に動かさなくとも、動きデータに基づく音楽ロボット装置12の動きの特徴を容易に確認させ、所望の動きデータを容易に検索させることができる。
(もっと読む)
ロボットコントロールシステム
【課題】ロボットの操作性を向上させることができるロボットコントロールシステムを提供すること。
【解決手段】ロボット1と、ロボット1に対してRAWコマンドを送信する送信機2とを有するロボットコントロールシステム100であって、ロボット1は、複数のサーボモータ5と、センサ部6と、制御部3とを備える。制御部3が、RAWコマンドを受信したとき、センサ部6の検出結果と制御部で実行されるプログラムとにより得られたロボット1の状態に応じた動作コマンドを設定し、該動作コマンドに基づいてサーボモータ5を、それぞれ駆動することによりロボット1の動作を実現する。
(もっと読む)
立体パズルブロック
本発明の立体パズルブロック(1)は、お互いに直角になる十字結合が可能な様に上下が開放されて側面(11、31)に形成された結合溝(13、33)と側面(11、31)がお互いに一致する側面結合が可能な様に本体に形成された結合溝(13)の両側にそれぞれ形成された結合突起(14)及び結合孔(15)が形成され、上記十字結合を堅固にする為に上記結合溝(13、33)の左右側面に形成され、結合溝(13、33)が接する上下面(40、41)の接触部(42)に多数個のエンボシング(12)を形成させ、面白さと興味誘発の為に上記結合溝(13、33)の左右側面に形成された終断面(16、36)に固定されるコネクター(17)と上記コネクター(17)に電線で連結されて内部に内蔵された作動手段(21)が構成されて全年齢層が楽しむ事が出来、多様な形状でも多様で堅固な構造物組合が可能なものである。 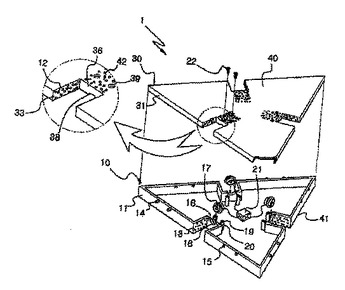 (もっと読む)
(もっと読む)
1 - 4 / 4
[ Back to top ]