
Fターム[2C150EC09]の内容
Fターム[2C150EC09]に分類される特許
1 - 5 / 5
歩行ロボット
【課題】従来から行われるアクチュエータによる能動的歩行だけではなく受動的歩行を積極的に行うことで、歩行ロボットの歩行に要するエネルギーを低減し、効率的な歩行の実現を図る。
【解決手段】歩行ロボットにおいて、その歩行と連動して、所定の閉空間内で制御用空気の動きを制御することで、該歩行ロボットの歩行をアシストする空気回路部を備える。そして、空気回路部は、歩行ロボットの歩行時において脚が立脚状態から遊脚状態に移行する際に、該脚を構成する各リンク部材の各関節部を介して行われる相対位置変化によって、制御用空気を介して該歩行のエネルギーの一部を回収する歩行エネルギー回収部と、歩行ロボットの歩行時において、脚が遊脚状態から立脚状態へ移行する際に、歩行エネルギー回収部によって回収された歩行エネルギーを開放し、該脚の立脚状態への移行をアシストする歩行アシスト部と、を有する。
(もっと読む)
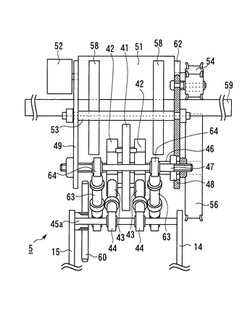
模型用サーボ装置

【課題】減速機構に遊星歯車を用いて小型で高トルクを得る。
【解決手段】筐体2内に、受信機からの信号によって回転駆動させるモータ4と、大小の平歯車が同軸上に一体化された平歯車ユニット8,10,12を組み合わせることでモータ4の回転を減速伝達する減速機構6と、モータ4の駆動軸5と一致しない位置で駆動軸5に対して平行に設けられ、減速機構6から減速伝達されたモータ4の回転をサーボホーン20に伝達する出力軸7と、出力軸7の回転角度を検出するポテンショメータ27とを備え、ポテンショメータ27により検出された出力軸7の回転角度に基づいてフィードバック制御を行う模型用サーボ装置1において、減速機構6の最後段に、太陽ギア17と、太陽ギア17の周りを自転しながら周回する遊星ギア18とを備えた遊星歯車ユニット14を出力軸7の同軸上に配置する。
(もっと読む)
自動車玩具
【課題】グリップ走行及びドリフト走行の切り替えが簡単にできる自動車玩具を提供すること。
【解決手段】走行用直流モータから前輪までの動力伝達経路には、走行用直流モータが後輪を前進方向に回転させるときに走行用直流モータと前輪とを連結させて前輪を前進させる方向に回転させる一方で、走行用直流モータが後輪を後進方向に回転させるときに走行用直流モータと前輪との連結を解除させて前輪を前進方向に空転可能な状態とするクラッチ機構が設けられ、
プレイヤが前記外部コントローラによって選択したモードが前進モードから後進モードに切り替わった際、後進モードの選択時から所定時間、走行用直流モータを強制的に停止させることを特徴とする。
(もっと読む)
回転動作部材を内蔵したブロック玩具単位体
【目的】 所定形式で設けられた凹凸構造を相互に嵌め込むことで単位体同士の連結を図り、それにより自由に立体形状を形成することができるブロック玩具において、内蔵した所定の回転動作機構による回転動作をブロック玩具単位体相互や別の可動部を備えた部材に伝達することができるブロック玩具単位体を提案する。
【構成】 頂面に形成された凸部11と該凸部11を嵌め込み固定するために底面に形成された凹部12とを嵌め込み組合わせることで自由に連結することができるブロック玩具1において、ブロック玩具本体内に回転可能とした歯車部材2を備え、しかも該歯車部材2の歯先端部2aがブロック玩具本体の側面部から突出されることで、隣接させたブロック玩具単位体1同士の間で突出した歯先端部2aが噛み合い回転動作を相互に伝達できるようにされた回転動作部材を内蔵したブロック玩具単位体。
(もっと読む)
走行玩具
【課題】モータ動力でもって左右の脚を前後に揺動動作させて走行し、切替によって直進や旋回が可能な走行玩具を提供すること。
【解決手段】後側左右に第1の脚が設けられ、第1のモータは別個の遊星歯車機構を介して左右の第1の脚に連結され、遊星歯車機構の各々は太陽歯車、遊星歯車、遊星キャリア及び内歯歯車から構成され、第1のモータの動力による遊星キャリアの各々の回転によって左右の第1の脚が前後に揺動するように構成され、後側の左右には第2の脚が設けられ、遊星キャリアの各々はそれぞれ別個の動力伝達機構を介して左右の第2の脚に連結され、遊星キャリアの各々の回転によって左右の第2の脚が前後に揺動するように構成され、第2のモータは歯車機構を介して一方の内歯歯車と連結され、第2のモータの動力によるその内歯歯車の回転によって左右の脚の相対位置を変更可能となるように構成されている。
(もっと読む)
1 - 5 / 5
[ Back to top ]