
Fターム[2C150FC15]の内容
Fターム[2C150FC15]に分類される特許
1 - 3 / 3
動作玩具
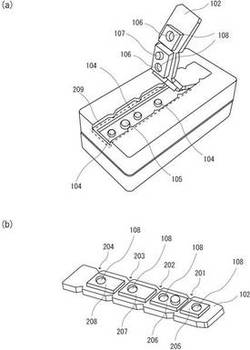
【課題】ジッパーを剥がす感覚を何度でも繰り返して味わうことを可能とし、かつ、遊戯的要素が追加された玩具を提供する。
【解決手段】本発明の動作玩具は、本体上部に設けられた第1の吸着部材およびスイッチと、第1の吸着部材により吸着可能な切り掛け部材と、音声を出力するスピーカー部と、を有し、切り掛け部材と磁石との着脱により、スイッチがオン又はオフし、スイッチがオン状態になった場合にスピーカー部から音声が出力される。なお、切り掛け部材は、第1の吸着部材により吸着される位置に第2の吸着部材を有することが好ましい。
(もっと読む)
玩具用触覚リモートコントロール装置

【課題】ユーザに更なるインタラクティブな体験を提供し、リモート玩具装置の制御とインターフェースの容易性を大きく向上させることができる装置を提供すること。
【解決手段】触覚フィードバックリモートコントロール装置は玩具装置に制御信号を与える。前記リモートコントロール装置は、筐体(24)と、対応する発泡体(compliant foam)の層(62)と、充電電池(60)と、アクチュエータアセンブリ(50)とを備える。前記対応する発泡体の層(62)は、電池(60)のシステムに対する慣性寄与を低減し、ユーザがアクチュエータアセンブリ(50)で触覚感覚をより強く感じることを可能にする。
(もっと読む)
コミュニケーションロボット
【構成】コミュニケーションロボット10は、全身に分散配置された複数のピエゾセンサシートすなわち触覚センサ58を含み、触覚センサ58の出力のパターンと、コミュニケーション相手の位置および姿勢に関する情報とを対応付けた、登録相手ごとのマップを記憶するマップDB92を備える。マップDB92に記憶された複数の相手のマップを用いて、取得した触覚センサ出力ベクトルと、たとえば眼カメラ50で撮影した画像データから検出した相手の位置・姿勢とに基づいて、触行動をしている相手が誰であるかを特定する。ロボット10はたとえば認識相手に合わせた行動を実行する。
【効果】IDタグを装着させなくても触覚に基づいて個人認識を行うことができ、より自然なコミュニケーションを実現できる。
(もっと読む)
1 - 3 / 3
[ Back to top ]